Добавлен: 17.03.2024
Просмотров: 20
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
башенных и железнодорожных кранов, цепных и роторно-стреловых экскаваторов, а также для экскаваторов-профилировщиков.
Основными элементами рельсового ходового устройства являются размещаемые на рельсах стальные колеса с гладким ободом с одной или двумя ребордами. Привод ведущих колес может быть общим от электродвигателя или двигателя внутреннего сгорания через систему валов и передач и индивидуального электродвигателя через редуктор. Приводы оборудуют управляемыми и автоматическими тормозами. Одно или несколько колес с общей рамой, двигателем, редуктором и тормозом образуют приводную ходовую тележку. Количество колес в тележке определяется действующей нагрузкой. Приводные и неприводные (без привода) ходовые тележки кранов шарнирно соединяются с опорной рамой и оборудуются противоугонными клещевыми захватами.
Многие строительные машины (стреловые краны, строительные экскаваторы, погрузчики и др.) имеют поворотное в плане рабочее оборудование, установленное, как правило, на поворотной платформе. Платформа опирается на раму ходового устройства через опорно-поворотный круг (ОПК) и поворачивается в плане поворотным механизмом. Широко применяются унифицированные роликовые ОПК. Их составными частями являются (рис.43,а): наружные подвижные кольца 2 и 3, скрепленные болтами, ролики 7, используемые в качестве тел качения, и внутреннее неподвижное кольцо 5 с зубчатым венцом б. Кольца 2 и 3 жестко крепятся к поворотной платформе, а кольцо 5 — к раме ходового устройства. Расположенные между кольцами ролики имеют взаимно перпендикулярные оси (рис.43,б) и наклонены к вертикали под углом 30 или 60°, в результате чего половина их, катящаяся по дорожкам В, воспринимает опорные нагрузки, а другая половина, катящаяся по дорожкам Г, — отрывные, удерживая поворотную платформу от опрокидывания.
Роликовые ОПК выпускают одно- и двухрядными, с внутренним и наружным зубчатым венцом. В постоянном зацеплении с зубчатым венцом ОПК находится ведущая (обегающая) шестерня поворотного механизма, которая обегает венец, поворачивая платформу. Поворотный механизм располагается на поворотной платформе. У машин с электрическим, гидравлическим и комбинированным приводом
поворотный механизм включает зубчатый или червячный редуктор с обегающей шестерней на выходном валу, индивидуальный приводной электродвигатель или низко моментный гидромотор и тормозное устройство. При использовании высоко моментного гидромотора редуктор отсутствует, а обегающая шестерня крепится непосредственно на валу гидромотора. У машин с механическим приводом поворотный механизм (редуктор с обегающей шестерней и тормозом) Приводится в действие от общей трансмиссии машины. Тормоза поворотных механизмов могут быть управляемыми и автоматическими.
Список литературы
Гоберман А. Л., Степанян К. В., Яркин А. А. и др. Теория, конструкции и расчет строительных и дорожных машин. М„ 1979.
Грубник Г.А. Методические указания к лабораторной работе «Составление схемы многомоторного привода одноковшового экскаватора и определение основных параметров».Л., 1977, 15 с.
http://twidler.ru/referat/transport/raschet-ramy-skrepera-155250
Справочник механика открытых работ. Экскавационно-транспортные машины циклического действия /Под ред.М.И.Щадова.М.:Недра,1989
Горные машины для открытых работ. Карьерные экскаваторы.
К.П. Хмызников, Ю.В.Лыков. Учебное пособие. Санкт-Петербург,1999.
. Экскаваторы и стреловые самоходные краны. Каталог справочник. – М.: АО «Машмир», 1998.
Баловнев В. Дорожно-строительные машины и комплексы – М.-Омск, СибАДИ, 2001.

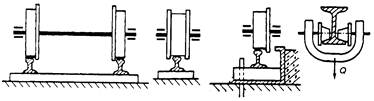 Рис.42. Рельсоколесное ходовое оборудование Рис.42. Рельсоколесное ходовое оборудование |
Основными элементами рельсового ходового устройства являются размещаемые на рельсах стальные колеса с гладким ободом с одной или двумя ребордами. Привод ведущих колес может быть общим от электродвигателя или двигателя внутреннего сгорания через систему валов и передач и индивидуального электродвигателя через редуктор. Приводы оборудуют управляемыми и автоматическими тормозами. Одно или несколько колес с общей рамой, двигателем, редуктором и тормозом образуют приводную ходовую тележку. Количество колес в тележке определяется действующей нагрузкой. Приводные и неприводные (без привода) ходовые тележки кранов шарнирно соединяются с опорной рамой и оборудуются противоугонными клещевыми захватами.
Многие строительные машины (стреловые краны, строительные экскаваторы, погрузчики и др.) имеют поворотное в плане рабочее оборудование, установленное, как правило, на поворотной платформе. Платформа опирается на раму ходового устройства через опорно-поворотный круг (ОПК) и поворачивается в плане поворотным механизмом. Широко применяются унифицированные роликовые ОПК. Их составными частями являются (рис.43,а): наружные подвижные кольца 2 и 3, скрепленные болтами, ролики 7, используемые в качестве тел качения, и внутреннее неподвижное кольцо 5 с зубчатым венцом б. Кольца 2 и 3 жестко крепятся к поворотной платформе, а кольцо 5 — к раме ходового устройства. Расположенные между кольцами ролики имеют взаимно перпендикулярные оси (рис.43,б) и наклонены к вертикали под углом 30 или 60°, в результате чего половина их, катящаяся по дорожкам В, воспринимает опорные нагрузки, а другая половина, катящаяся по дорожкам Г, — отрывные, удерживая поворотную платформу от опрокидывания.
Роликовые ОПК выпускают одно- и двухрядными, с внутренним и наружным зубчатым венцом. В постоянном зацеплении с зубчатым венцом ОПК находится ведущая (обегающая) шестерня поворотного механизма, которая обегает венец, поворачивая платформу. Поворотный механизм располагается на поворотной платформе. У машин с электрическим, гидравлическим и комбинированным приводом
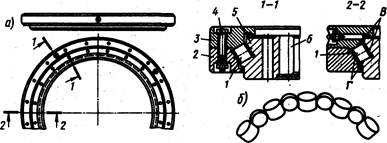 Рис.43. Роликовый опорно-поворотный круг Рис.43. Роликовый опорно-поворотный круг |
поворотный механизм включает зубчатый или червячный редуктор с обегающей шестерней на выходном валу, индивидуальный приводной электродвигатель или низко моментный гидромотор и тормозное устройство. При использовании высоко моментного гидромотора редуктор отсутствует, а обегающая шестерня крепится непосредственно на валу гидромотора. У машин с механическим приводом поворотный механизм (редуктор с обегающей шестерней и тормозом) Приводится в действие от общей трансмиссии машины. Тормоза поворотных механизмов могут быть управляемыми и автоматическими.
Список литературы
Гоберман А. Л., Степанян К. В., Яркин А. А. и др. Теория, конструкции и расчет строительных и дорожных машин. М„ 1979.
Грубник Г.А. Методические указания к лабораторной работе «Составление схемы многомоторного привода одноковшового экскаватора и определение основных параметров».Л., 1977, 15 с.
http://twidler.ru/referat/transport/raschet-ramy-skrepera-155250
Справочник механика открытых работ. Экскавационно-транспортные машины циклического действия /Под ред.М.И.Щадова.М.:Недра,1989
Горные машины для открытых работ. Карьерные экскаваторы.
К.П. Хмызников, Ю.В.Лыков. Учебное пособие. Санкт-Петербург,1999.
. Экскаваторы и стреловые самоходные краны. Каталог справочник. – М.: АО «Машмир», 1998.
Баловнев В. Дорожно-строительные машины и комплексы – М.-Омск, СибАДИ, 2001.