Файл: азастан республикасыны жоАРы білім жне ылым министрлігі стбаев университеті.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.03.2024
Просмотров: 13
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ҚАЗАҚСТАН РЕСПУБЛИКАСЫНЫҢ ЖОҒАРҒЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
СӘТБАЕВ УНИВЕРСИТЕТІ
 |
Институт: «Автоматика және ақпараттық технологиялар»
Кафедра: «Автоматтандыру және басқару»
Зертханалық жұмыс №1
Тақырыбы: Бақылау жетектерінің манипуляторлар жүйесін модельдеу
| № | Орындалған жұмыстың сапасы | Баға диапазоны | Алған % |
| 1 | Орындалмаған Себепсіз сабақтан қалуы | 0% | |
| 2 | Орындалуы және білім алушының белсенділігі | 0-50% | |
| 3 | Жұмыстың рәсімделуі | 0-20% | |
| 4 | Анықтамаларды, техникалық әдебиеттерді, дәріс конспектілерін, пәннің оқу-әдістемелік кешенін пайдалана білуі | 0-5% | |
| 5 | Техникалық құралдарды пайдалана білуі | 0-5% | |
| 6 | Жұмысты қорғауы | 0-20% | |
| | Қорытынды | 0-100% | |
Білім алушының аты-жөні:
Болатов Мирхат Бауржанович
Мамандық шифрі:
6B07103 – Автоматтандыру және
роботтандыру
Оқытушының аты-жөні:
Абжапаров Куаныш Алмабекович
Алматы 2023
№1 зертханалық жұмыс
Жұмыстың мақсаты: Бақылау жетектерінің манипуляторлар жүйесінің моделін зерттеу.
Тапсырма: Simulink ортасында бақылау жетектерінің манипуляторлар жүйесінің имитациялық моделін құрастыру.
Негізгі теориялық мәлімет
Бақылау жетектері жүйелерінің қажетті сапа көрсеткіштерін қамтамасыз ету үшін әдетте кері, тізбектей және параллель түзету байланыстары қолданылады. Осыған сәйкес, синтездің міндеті түзетілген жетектің күшейту параметрлерін таңдау болып табылады. Осылайша, осы параграф жұмыста сипатталған параметрлік реттеу принципін жетілдіруге және манипулятордың бақылау жетектері жүйесіндегі динамикалық процестердің сапасын жақсарту арқылы оның тиімділігін зерттеуге арналған.
Жұмыс барысы
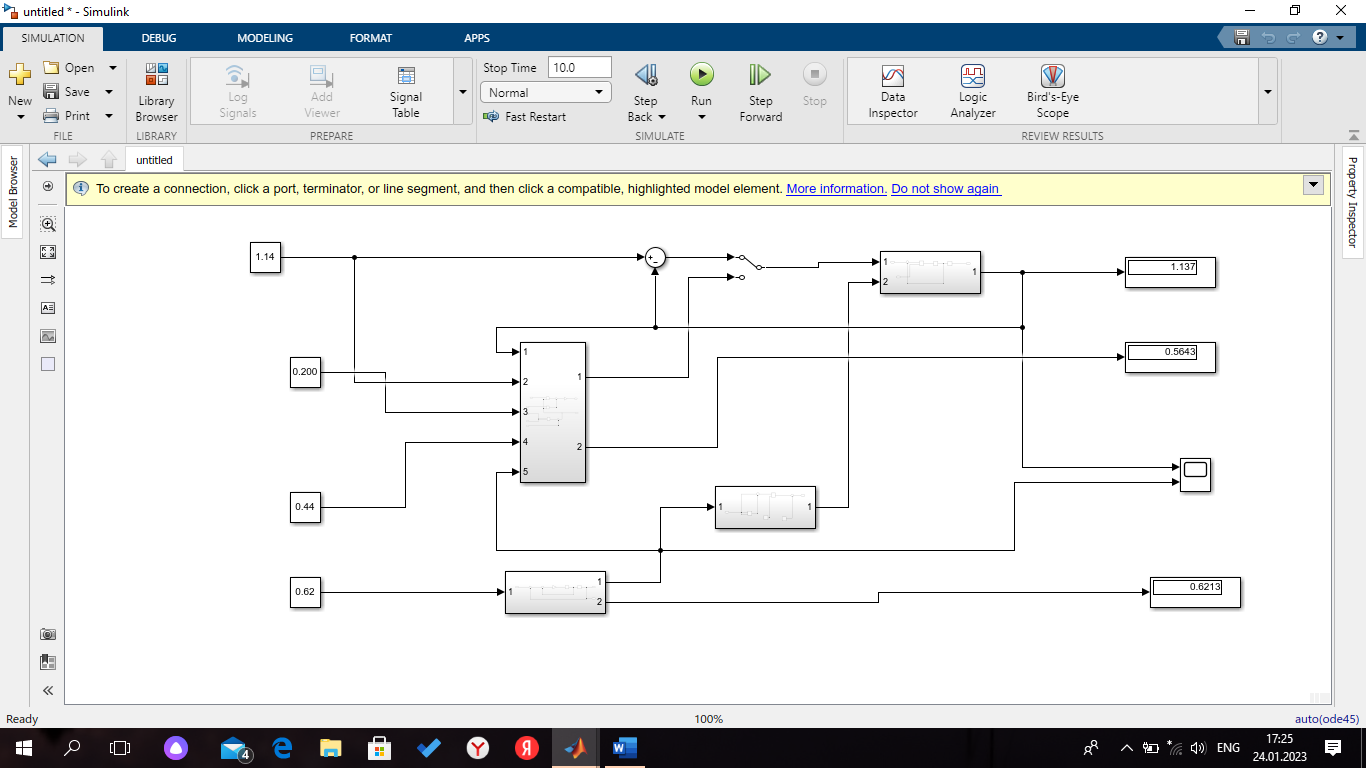
1-сурет. Зерттелетін манипулятордың бақылау жетектері жүйесінің моделі (Имитационная модель системы следящих приводов исследуемого манипулятора).
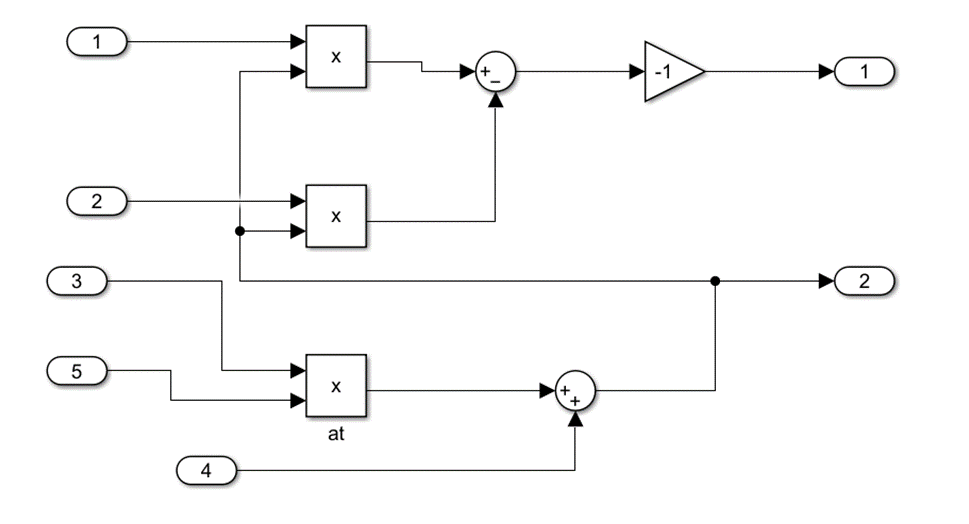
2-сурет. Манипулятордың бұрыштық қозғалысының бақылау жетегінің негізгі кері байланысының пайда мәнін параметрлік реттеудің ішкі жүйесі (Подсистема пареметрического регулирования значения коэффициента усиления главной обратной связи следящего привода углового перемещения маниипулятора).

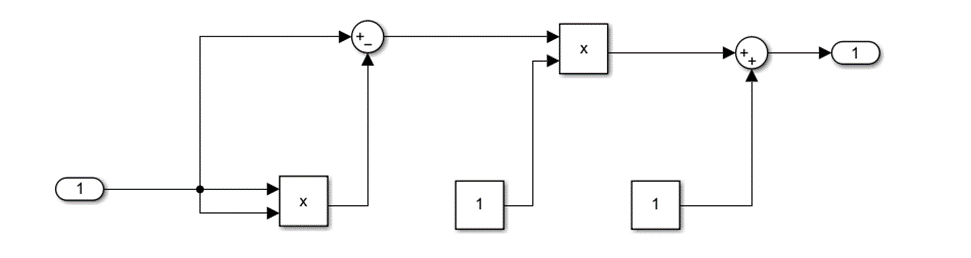
3-сурет. Сызықтық қозғалыстың бақылау жетегінің манипулятордың бұрыштық қозғалысының бақылау жетегіне динамикалық әсерін сипаттайтын ішкі жүйе (Подсистема, характеризующая динамическое влияние следящего привода линейного перемещения на следящий привод углового перемещения манипулятора).
4-сурет. Манипулятордың бұрыштық қозғалысын басқару арнасының ішкі жүйесі бақылау жетектері жүйелері (Подсистема канала управления по угловому перемещению манипулятора системы следящих приводы).
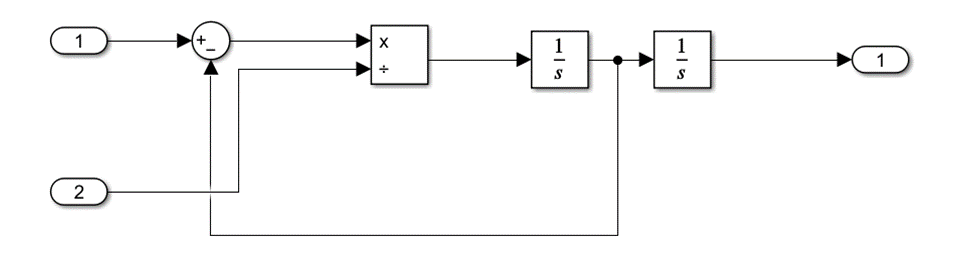
5-сурет. Бақылау жетектері жүйесінің манипуляторының сызықтық қозғалысы бойынша басқару арнасының ішкі жүйесі (Подсистема канала управления по линейному перемещению манипулятора системы следящих приводов).

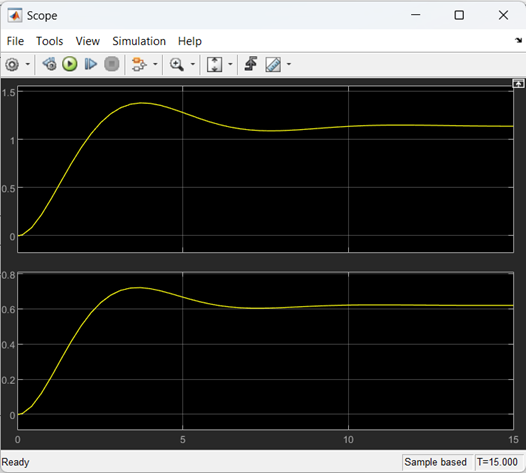
6-сурет. Өтпелі процесс КР және КПР f1=1,14; r=0,62 мәндерінде


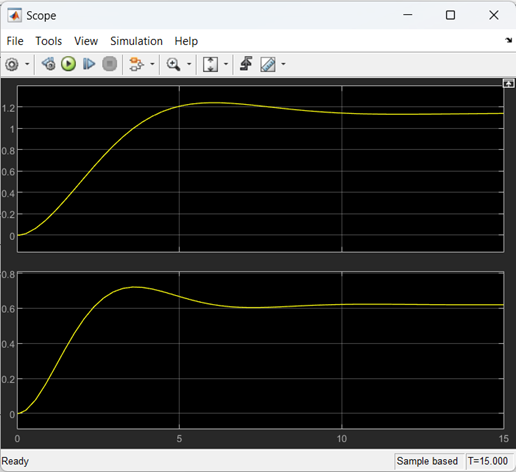
7-сурет. Өтпелі процесс КР және КПР f1=2; r=1,08 мәндерінде
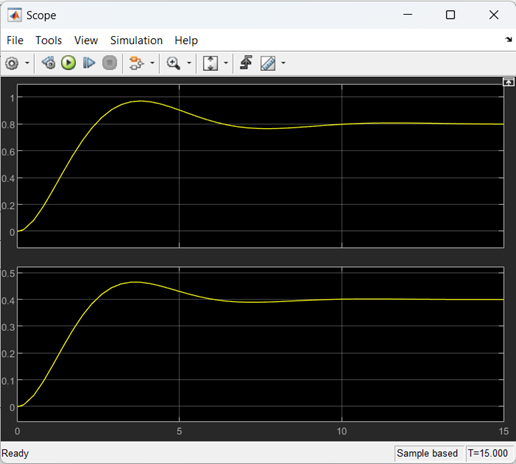
8-сурет. Өтпелі процесс КР және КПР f1=0,8; r=0,4 мәндерінде
Қорытынды
Басқару жүйесінің шығысында екі сигнал бар:
- бұрыштық қозғалыстың өтпелі процесі
- сызықтық қозғалыстың өтпелі процесі
Жүйенің динамикалық қасиеттеріне ПР әсерін бағалау критерийлері ретінде қайта реттеу шамасы ẟ және өтпелі процестің уақыты tn қабылданады.
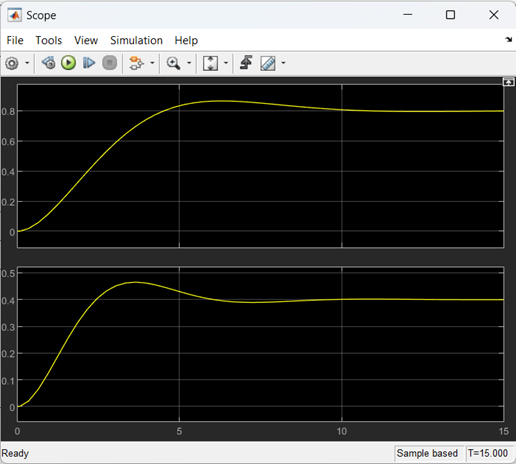
Модельдеу нәтижелерінің осциллограммаларынан көріп отырғанымыздай, КПР-мен
 бұрыштық қозғалысының бақылау жетегіндегі өтпелі процестер екі жағдайда да манипулятордың сызықтық қозғалысының бақылау жетегіндегі өтпелі процестердің өзгермейтін сипаттамаларында КР-мен бақылау жетегімен салыстырғанда айтарлықтай төмен қайта реттеу мәндеріне ие.
бұрыштық қозғалысының бақылау жетегіндегі өтпелі процестер екі жағдайда да манипулятордың сызықтық қозғалысының бақылау жетегіндегі өтпелі процестердің өзгермейтін сипаттамаларында КР-мен бақылау жетегімен салыстырғанда айтарлықтай төмен қайта реттеу мәндеріне ие.Осылайша, манипулятордың конфигурациясына байланысты жүйенің оңтайлы күшейту мәнін сақтау үшін сызықтық параметрлік реттегішті қолдану айнымалы инерциялық жүктемесі бар бақылау дискісіндегі динамикалық процестердің ағынын, демек, манипуляция процесінің сапалық көрсеткіштерін жақсартуды қамтамасыз етеді.
КПР және КР манипуляторының бақылау жетектерінің
және r жүйелерінің кіріс әсерінің әртүрлі қарапайым мәндерінде модельдеу жүргізілді, оның нәтижелері суреттерде тіркелген. Алынған нәтижелерден, шын мәнінде, КПР бар бақылау жетектері жүйесі манипулятордың қажетті динамикалық сипаттамаларын қамтамасыз етеді.