Файл: Суммативное оценивание 3 за разделы Робототехника, Соревнования роботов 5 класс.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 28.03.2024
Просмотров: 6
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Суммативное оценивание №3 за разделы «Робототехника», «Соревнования роботов»
5 класс
| Цель обучения | 5.3.4.1 формулировать определение робота 5.3.4.2 приводить примеры разновидностей роботов и области их применения 5.3.4.3 приводить примеры технических достижений человечества в области робототехники 5.3.4.4 объяснять принцип работы гироскопического датчика 5.3.3.2 создавать программы для поворота робота на заданные градусы 5.3.3.3 использовать датчик цвета для организации движения робота |
| Критерии оценивания | Записывает правильное определение робота / альтернативные ответы; Выбирает по картинке промышленный вид роботов; Приводит примеры технических достижений человечества в области робототехники; Объясняет принцип работы гироскопического датчика; Создает программу для поворота робота на заданные градусы; Использует датчик цвета для организации движения робота. |
Уровень навыков: знание и понимание, применение
Время выполнения: 25 минут
Задания
-
Напишите определение понятия «РОБОТ»
___________________________________________________________________________
-
Роботы, в зависимости от их функций, бывают нескольких видов. Ниже представлены различные виды роботов. Выбери только промышленных роботов (выбери 2 картинки)
A)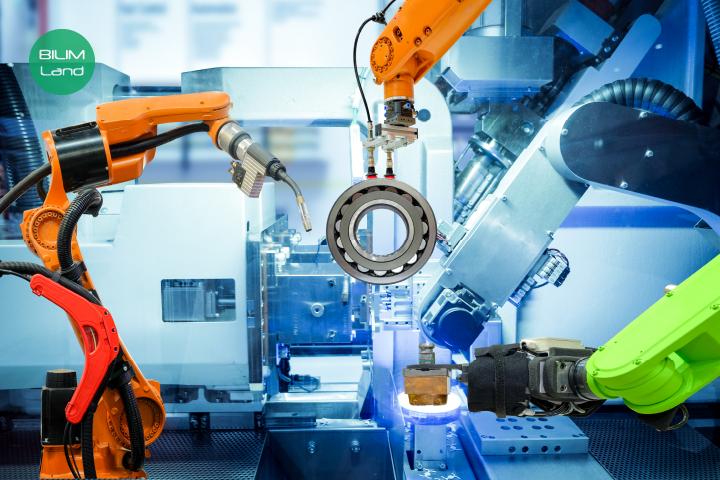
B)
C)
D)
E)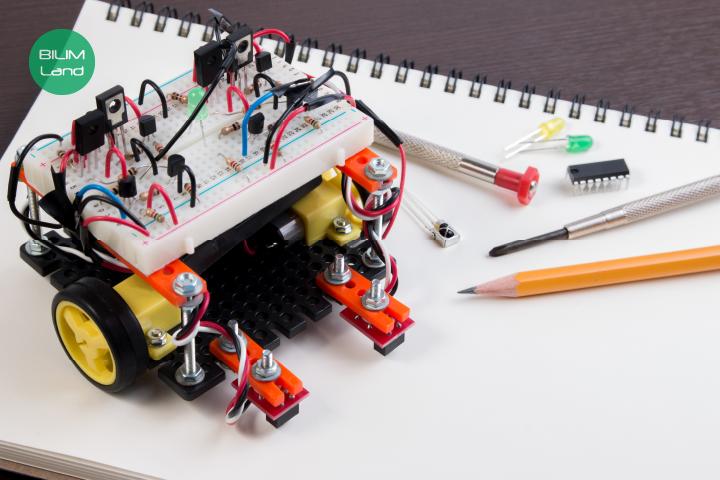
-
Приведи 2 примера достижений человечества в области робототехники. В примерах можно указать название роботов, виды и назначение, то есть описать функции, которые они могут выполнять.
-
Выбери две основные функции гироскопического датчика
А) измерение угла вращения; Б) измерение скорости движения робота;
В) измерение скорости вращения в градусах в секунду; Г) нахождение объектов в пространстве; Д) определение яркости освещения
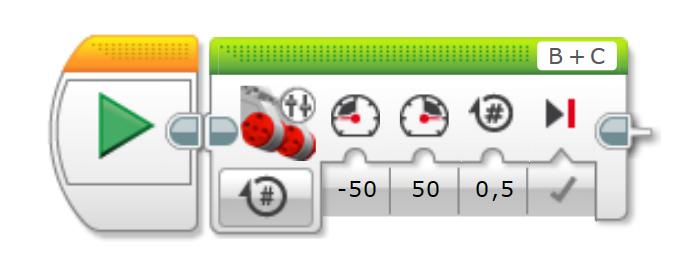
5. Изучите предложенный фрагмент программного кода. Определите, в какую сторону и на какой градус поворачивает робот.
-
на 90 градусов вправо; B) на 180 градусов вправо; C) на 90 градусов влево; D) на 180 градусов влево.
6.Изучи программный код. В каком случае робот проедет прямо на 1 оборот своего колеса?
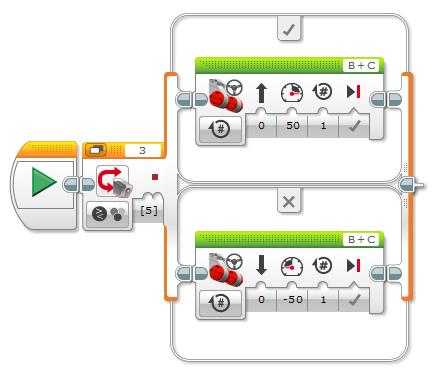
A) При обнаружении датчиком цвета красного цвета; B) При обнаружении датчиком цвета черного цвета; C) При обнаружении датчиком цвета любого цвета; D) При обнаружении датчиком цвета зеленого цвета.
7. Изучите программный код. Каким образом изменится движение робота при обнаружении красного, желтого или зеленого цветов? Установи соответствие.
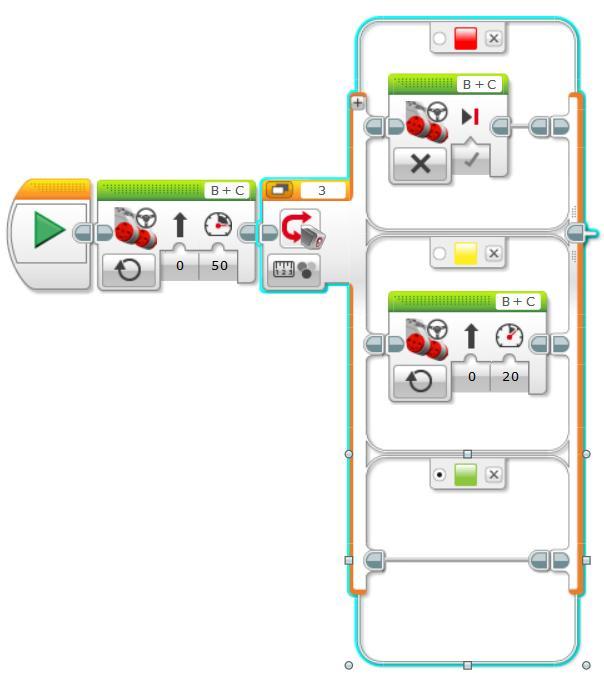
| 1.Красный | A) Робот остановится |
| 2.Жёлтый | B) Робот продолжит двигаться, не меняя скорости движения |
| 3.Зеленый | C) Робот снизит скорость движения |
| Критерий оценивания | Номер задания | Дескриптор | Балл |
| Записывает правильное определение / альтернативные ответы | 1 | Записывает правильное определение робота | 1 |
| Выбирает по картинке промышленный вид роботов | 2 | Правильно выбраны промышленные роботы | 2 |
| Приводит примеры технических достижений человечества в области робототехники | 3 | Записывает первый пример технических достижений человечества в области робототехники | 1 |
| Записывает второй пример технических достижений человечества в области робототехники | 1 | ||
| Объясняет принцип работы гироскопического датчика | 4 | Выбирает верные функции гироскопического датчика | 2 |
| Создает программу для поворота робота на заданные градусы | 5 | Верно определяет направление и градус угла поворота робота | 1 |
| Использует датчик цвета для организации движения робота | 6 | Определять цвет, при обнаружении которого робот поедет вперед | 1 |
| 7 | Указывает действия робота в зависимости от показаний датчика цвета | 1 | |
| Итого | | | 10 |

