ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 24.04.2024
Просмотров: 5
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Тесты по Моделированию ФП
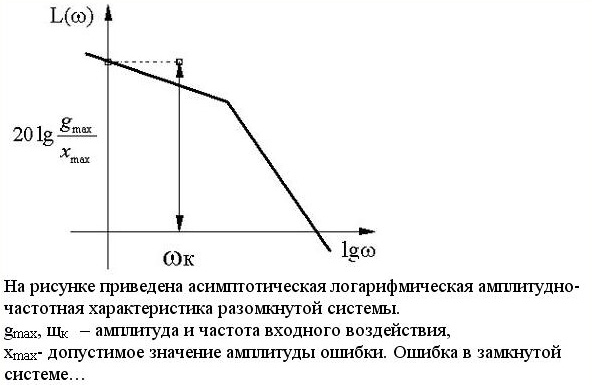
1.Можно ли управлять системой так, чтобы не было ошибки?
-
Можно (для систем с малой инерционностью) -
Можно (для безинерционных систем) -
Нельзя.
2.Обратная связь в САУ, которая используется для уменьшения разницы между заданным и фактическим состоянием объекта управления, называется…
-
по отклонению -
отрицательной -
жесткой
3.Основными шагами при моделировании физических процессов технических систем являются…
-
составление математической модели -
составление математической модели и алгоритма расчета -
составление математической модели, алгоритма и программы расчета
4.

-
10% -
0% -
5% -
30%
5.
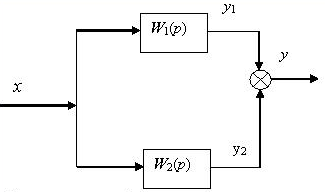
Передаточная функция соединения двух звеньев с передаточными функциями
 и
и  имеет вид:
имеет вид:-
-
 -верно
-верно -
-
6.
-
равна нулю -
больше допустимой величины -
имеет допустимую величину -
меньше допустимой величины
7. Заданы желаемая
 и неизменяемая
и неизменяемая  передаточные функции
передаточные функции
Параметры последовательного корректирующего устройства с передаточной функцией
 равны:
равны:-

-
 -верно
-верно -

-

8.
 - передаточная функция разомкнутой системы. Коэффициент статической ошибки в замкнутой системе примерно равен:
- передаточная функция разомкнутой системы. Коэффициент статической ошибки в замкнутой системе примерно равен:-
0.01 -
0.05 -
0.02 -
0.04
9. Если сигнал на выходе элемента представляет собой разность задающего и выходного сигналов системы, то его называют
-
преобразователем -
элементом сравнения -
чувствительным элементом -
дифференцирующим элементом
10. Длительность переходного процесса при отработке ступенчатого сигнала звеном с передаточной функцией
 равна (округлите до ближайшего целого, цифра). 2
равна (округлите до ближайшего целого, цифра). 2 11. Применение последовательного корректирующего звена с передаточной функцией
 позволяет:
позволяет:-
добиться требуемого расположения полюсов замкнутой системы -
повысить запасы устойчивости -
повысить порядок астатизма в системе -
повысить статическую точность системы
12. Экспериментально полученная установившаяся реакция системы на синусный входной сигнал частоты
 позволяет:
позволяет:-
построить частотную характеристику разомкнутой системы -
оценить устойчивость системы -
построить частотную характеристику замкнутой системы
13. Типовым входным сигналом системы управления не является:
-
гармонический сигнал -
единичное ступенчатое воздействие -
импульс прямоугольной формы -
линейное воздействие
14.
 передаточная функция разомкнутой системы. Замкнув систему единичной положительной обратной связью, получим передаточную функцию:
передаточная функция разомкнутой системы. Замкнув систему единичной положительной обратной связью, получим передаточную функцию:-

-
 -верно
-верно -

-

15. Переходная характеристика звена – это реакция системы на
-
импульс прямоугольной формы -
единичное импульсное воздействие -
единичное ступенчатое воздействие -
начальное отклонение регулируемой величины
16. Если в следящей системе с выходным сигналом
 управление
управление  формируется по закону
формируется по закону  , где
, где  входное воздействие, то в этой системе реализуется управление:
входное воздействие, то в этой системе реализуется управление:-
по возмущению -
по состоянию -
комбинированное -
по отклонению
17. Устройство, формирующее сигнал, подаваемый на систему и определяющий требуемое значение управляемой величины, является:
-
элементом сравнения -
исполнительным элементом -
задающим элементом -
чувствительным элементом
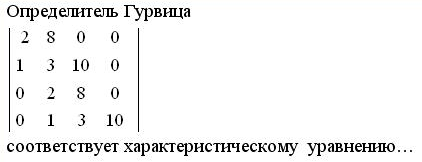
18.
 верно
верно 
19.

-
на колебательной границе устойчивости -
на апериодической границе устойчивости -
устойчива -
неустойчива
20. Логарифмическая амплитудно-частотная характеристика системы с передаточной функцией
-
пересекает ось абсцисс снизу вверх -
пересекает ось абсцисс сверху вниз -
целиком расположена ниже оси абсцисс -
целиком расположена выше оси абсцисс
21.

-
умножения -
свертки -
сложения
22. К показателям качества процесса регулирования не относится:
-
перерегулирование -
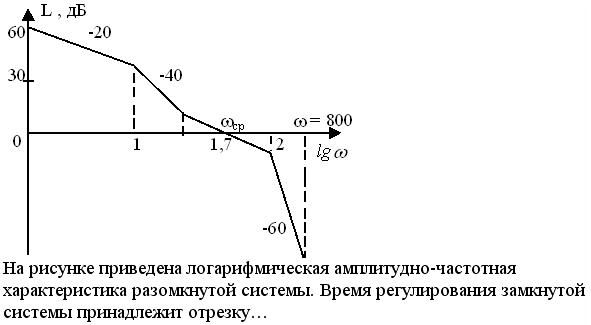
время регулирования -
полоса пропускания частот -
колебательность
23.
Ответ1
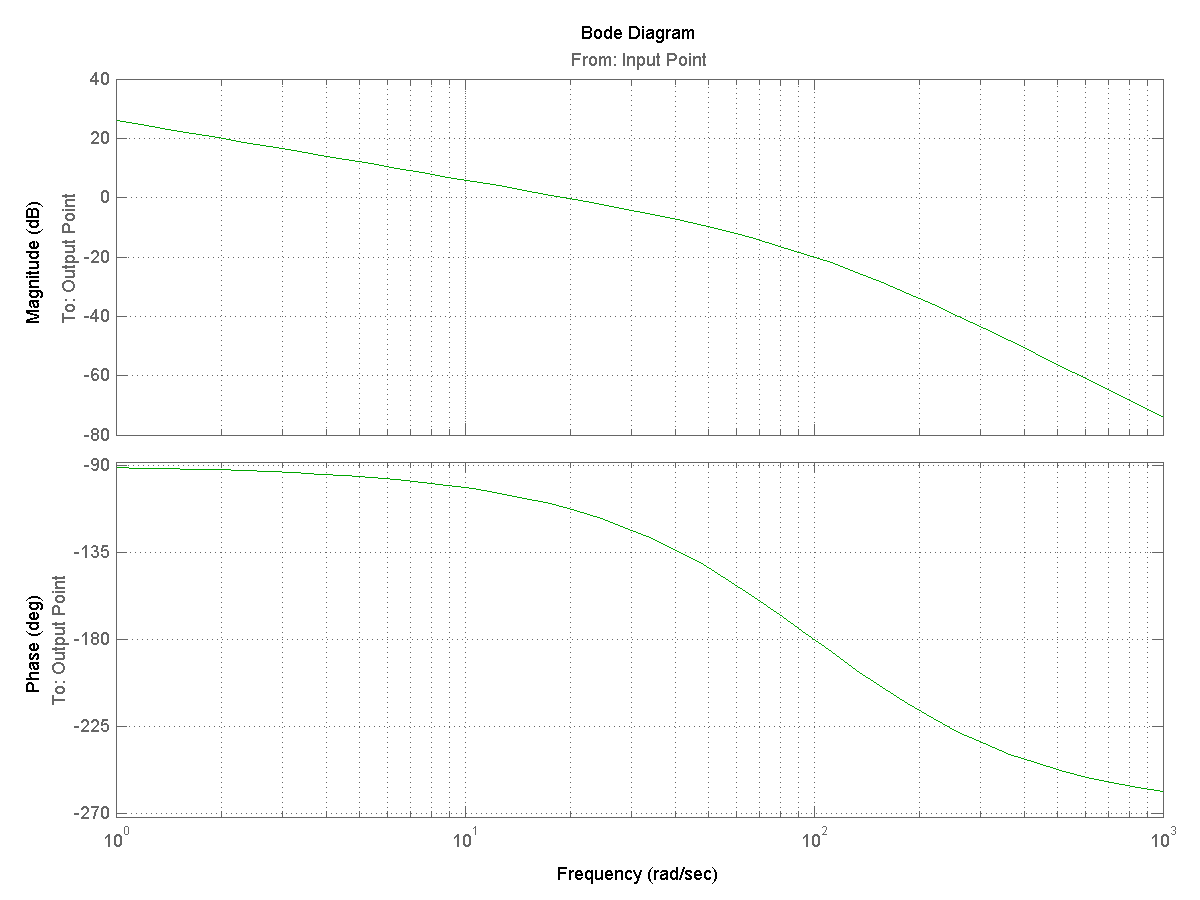
24. Определить полосу пропускания частот системы по ЛАФЧХ:
-
2 с-1 -
5 с-1 -
10 с-1 -
16 с-1
25.
-
0,5 -
1 -
6 -
2
26. На малых сигналах управления большее влияние на работу системы имеет нелинейность:
-
ограничение -
зона нечувствительности -
гистерезис -
люфт