Файл: Движение робота с помощью гироскопического датчика..docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.04.2024
Просмотров: 8
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Республика Саха ( Якутия) Муниципальное образование Кобяйский улус
Муниципальное казенное общеобразовательное учреждение
« Ситтинская средняя общеобразовательная школа
имени В.Е.Колмогорова»
План – занятия кружка робототехники.
«Движение робота с помощью гироскопического датчика.»
( средняя группа )
«Кружок робототехника »
Подготовил: учитель физики и информатики, Педагог ДО ЦДТ и Р
кружка по робототехнике
Дьяконов Николай Николаевич
2020-2021 уч год
Тема: «Движение робота с помощью гироскопического датчика.»
Тип урока: Ознакомление с новым материалом.
Цели:
-
Способствовать развитию алгоритмического мышления; -
Укрепить знания учащихся с помощью сборки Лего набора -
Сборка готовой модели RileyRover_BI. -
Написать программу на ПО LEGO MINDSTORMS Education EV3
-
Оборудование: презентация , инструкции RileyRover_BI и черепахи , проектор, наборы LEGO MINDSTORMS Education EV3 базовый 45544. ПО LEGO MINDSTORMS Education EV3.
Задачи :
Познавательное развитие:
Прививать навыки работы с ЛЕГО конструктором, закреплять умение детей действовать по схематической модели. Воспитывать интерес к конструированию из ЛЕГО. Развивать логическое мышление, внимание, навыки конструирования. Формировать умение работать с ИКТ.
.Речевое развитие:
-
Развивать словарный запас детей. Активизировать речевые навыки.
-
3Физическое развитие:
-
Развивать мелкую моторику рук.
-
Социально-коммуникативные навыки:
Ход урока
1 орг. Момент
Приветствие, посадка, перекличка.
Изложение материала
Ребята давайте отгадаем ребус и найдем тему нашего занятия:
Учитель : Ребята ,кто знает что такое гироскоп и где применяется ?
Дети: В военной технике, вертолетах, судах, танках, телефоне, гироскуторе и тд.
Гироскопический датчик.

-
Гироскопический датчик.
-
режим измерения углов с точностью до +/- 3 градуса -
встроенный гироскоп улавливает вращения с моментом до 440 град/с -
частота опроса до 1 кГц -
автоматическая идентификация программным обеспечением EV3
Гироскопический датчик
Цифровой гироскопический датчик предназначен для измерения угла и направления вращения робота, а также скорости его вращения.
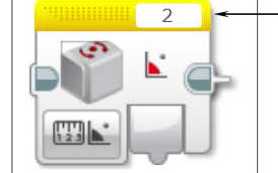
На рис. 2.5.3.1 представлен внешний вид датчика и изображение блока гироскопического датчика на жёлтой палитре программирования Датчик и в рабочем окне.
Точность измерения составляет +/-3°, максимальная скорость проведения измерений 440°/сек., частота опроса датчика 1кГц (в три раза выше частоты опроса Hi-Tech датчика гироскопа).
В
• Вид блока
Гироскопический датчик
нешний вид датчика
Внешний вид и программные блоки гироскопического датчика
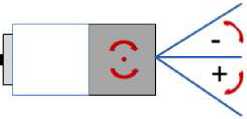
Рисунок 2.5.3.2. Направления вращения
Г
 ироскопический датчик определяет движение вокруг одной оси вращения. Это направление указано стрелкой на корпусе датчика (рис. 2.5.3.2).
ироскопический датчик определяет движение вокруг одной оси вращения. Это направление указано стрелкой на корпусе датчика (рис. 2.5.3.2). Угол и направление вращения может быть положительным или отрицательным. Вращение по часовой стрелке считается положительным, против часовой стрелки - отрицательным. Единица измерения скорости - градусы в секунду.
Отличие гироскопического датчика от других датчиков состоит в том, что, будучи включённым, при длительном нахождении робота в неподвижном состоянии, определяемое значение угла не остаётся постоянным, а ошибочно меняется или дрейфует. Поэтому, чем больше времени проходит от начала первого обращения к гироскопическому датчику до чтения показаний, тем менее точными становятся результаты за счёт систематического накопления ошибки. Поэтому перед началом каждого измерения всегда необходимо производить обнуление угла при помощи режима Сброс.
Рассмотрим подробнее работу гироскопического датчика. Датчик работает в режимах измерения, сравнения и позволяет делать сброс значений (рис. 2.5.3.3).ваш датчик ведёт подобным образом, выполните следующие действия:
-
включите робота; -
установите гироскопический датчик в неподвижное горизонтальное состояние
относительно нарисованных стрелок (как на рис. 2.5.3.2);
-
отсоедините кабель от датчика и снова присоедините его; -
дрифт исчезнет.
Задача. Напишите программу, согласно которой робот вращается с постоянно увеличивающейся скоростью и выводит на блок EV3 текущий угол и скорость поворота робота.
Решение:
Первый блок - сброс показаний гироскопического датчика. Затем в цикле 01 робот вращается и считывает показания гироскопического датчика в режиме Измерение - Угол и уровень. Условие завершения цикла 01 - Подсчёт (устанавливаем выполнение цикла 100 раз).
Для реализации вращения будем использовать программный блок Рулевое управление. На вход Мощность заводим проводник с выхода подсчёта количества шагов выполнения цикла. Таким образом, каждую секунду робот будет вращаться с мощностью, на единицу больше предыдущей мощности.
Проект «Упрямый робот»
- Цикл 01: робот крутится против часовой стрелки до тех пор, пока значение угла гироскопического датчика не станет меньше или равно 0.

Описание. Проект демонстрирует оригинальные программные приёмы работы с гироскопическим датчиком.
Создайте программы, позволяющие возвращать робота в начальное состояние при внешних воздействиях на него.
Мы устанавливаем робота в начальное состояние и запускаем программу. Затем вручную поворачиваем робота на какой-либо угол, нажимаем на датчик касания, и робот возвращается в исходное состояние.
Вариант 1. Поворачиваем робота на любой угол (в т.ч. более 360°) по часовой стрелке. Робот возвращается в исходное состояние тем же путём.
Решение:
-
Обнуляем гироскопический датчик. Вручную крутим робота, ждём нажатия датчика касания.
Применение полученных знаний. (Например роботы из Лего набора LEGO MINDSTORMS Education EV3 45544 )
Разработка разных алгоритмов для лего роботов.
Ребята давайте будем работать группами
Разделим работу над проектом: выбираем все
-
Инженера -
Менеджера проекта -
Программиста
Практическая деятельность учащихся
Задания для команд
1 группа 1 Команда
-
Сборка готовой модели RileyRover_BI. -
Написать алгоритм так, чтобы Лего робот двигался поворот на заданный угол . -
Проверка проекта, накладка программы -
Демонстрация
-
Группа 2 Команда
-
Сборка готовой модели черепахи
-
Написать алгоритм так, чтобы Лего робот показывал на экране модульного блока угол поворота. -
Проверка проекта накладка программы -
Демонстрация
Оценивание учащихся
Молодцы !
Теперь проанализируем наши работы.
Устранение ошибок, в каком этапе работы вы встретили трудности?
Что еще можно сделать или усовершенствовать?
Итог урока
Первичная проверка знаний
Ребята ,что мы узнали сегодня?
-
Что такое гироскоп? -
Где применяется гироскоп? -
Приведите примеры исполнителей алгоритмов? -
Как можно выводить результат измерения на экран модульного блока? -
Приведите пример алгоритмов?
Самое важное:
-
Команды, которые может выполнять исполнитель называются системой команд исполнителя (СКИ). -
Программу для робота с гироскопическими датчиками можно писать по-разному.
Ребята Запишите домашнее задание.
Домашнее задание:
В сети Интернет найти видеоролики и рисунки (фотографии) робота «Гиробой», предназначенного для перемещения и балансировки модели в вертикальной плоскости с использованием датчика гироскопа.

