Файл: The model is gyroverted in the matlab program student Shilin Dmitry Andreevich.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 28.04.2024
Просмотров: 5
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

УДК 681.2-5
THE MODEL IS GYROVERTED IN THE MATLAB PROGRAM
Student Shilin Dmitry Andreevich,
associate Professor Krivosheev Sergey Valentinovich,
KNRTU-KAI
Kazan, Russian Federation
Abstract. In this paper, a real model of G B was modeled in MatLab (Simulink) with the specified motion parameters. I.e., all the considered options with the parameters and calculated coefficients are given.
Keywords: acceleration, gyrovertical, precessional, correction, moment, error.
МОДЕЛЬ ГИРОВЕРТИКАЛИ В ПРОГРАММЕ MATLAB
студент Шилин Дмитрий Андреевич,
доцент Кривошеев Сергей Валентинович,
КНИТУ-КАИ
г. Казань, Российская Федерация
Аннотация. В данной работе была промоделирована в MatLab (Simulink) реальная модель ГВ при заданных параметрах движения. Т.е. все рассмотренные варианты с приведены параметрами и рассчитанными коэффициентами.
Ключевые слова: ускорение, гировертикаль, прецессионные, коррекция, момент, погрешность.
В модели программы используется система уравнений гировертикали:
 (1)
(1)Ниже представлены листинг программы и модель в программе Matlab(Simulink)(рис.1), в которых происходит моделирование прецессионных уравнений движения гировертикали:
%исходные данные
H=4000; %кинетический момент гироскопа[Нмс]
g=9.8; %ускорение свободного падения[м/с^2]
dV=0.1*g;
Fi=30/57.3; %угол[рад]
V=1000/3.6; %скорость [м/с]
Am=12/60/57.3; [угл.мин.]
Bm=12/60/57.3; [угл.мин.]
Ay=Am/2; %статические погрешности
By=Bm/2; %статические погрешности
Mdx=0.8; %моменты трения в подшипниках оси х относительно рамки карданова подвеса[Н*м]
Mdz=0.5; %моменты трения в подшипниках оси z относительно рамки карданова подвеса[Н*м]
R=6.371*10^6; %радиус земли [м]
U=7.29*10^-5; %угловая скорость вращения земли[1/c]
Ug=U*cos(Fi); %горизонтальная составляющая скорости земли
Psi0=30/57.3; %угол[рад]
WB=1/57.3; %WB=0; %угловая скорость виража[рад/с]
Wv=V/R; %Угловая скорость от облета земли
U1m=U*cos(Fi); %горизонтальные составляющие угловой скорости вращения земли
U2m=U*cos(Fi); %горизонтальные составляющие угловой скорости вращения земли
k1=(H/By)*(Wv+U2m+(Mdx/H)) % коэффициент, зависящий от параметров датчика
k2=(H/Ay)*((Mdz/H)+U1m) % коэффициент, зависящий от параметров датчика
Tk1=H/k1; %Постоянные времени цепей коррекции
Tk2=H/k2; %Постоянные времени цепей коррекции
Blv=atan(dV/g) %Blv=0; %угол
ложной вертикали
Alv=atan((V*WB)/g) %Alv=0; %угол ложной вертикали
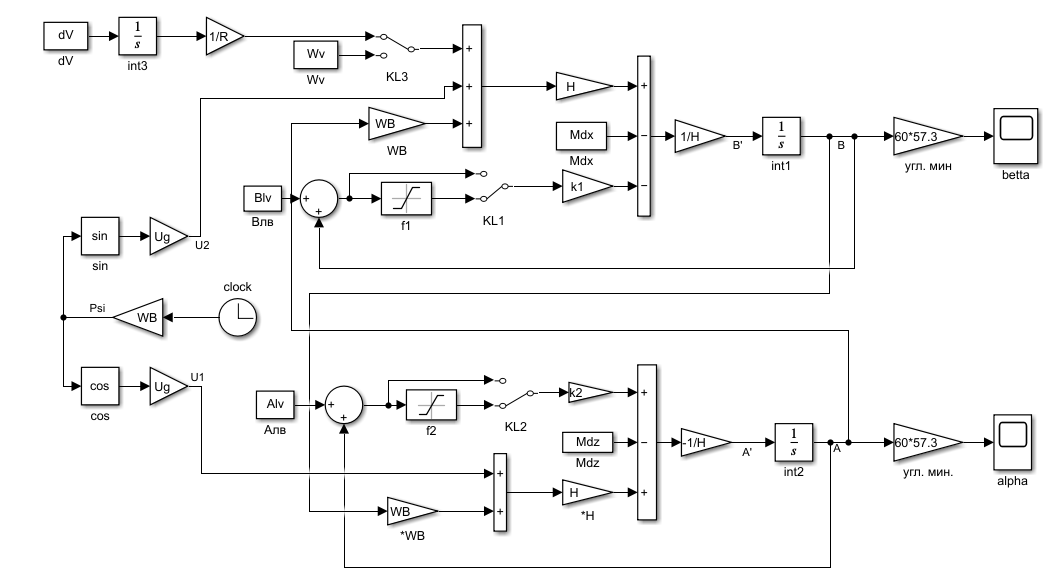
Рис.1. Модель гировертикали в программе Matlab(Simulink)
Ниже представлено 4 случая работы данной системы:
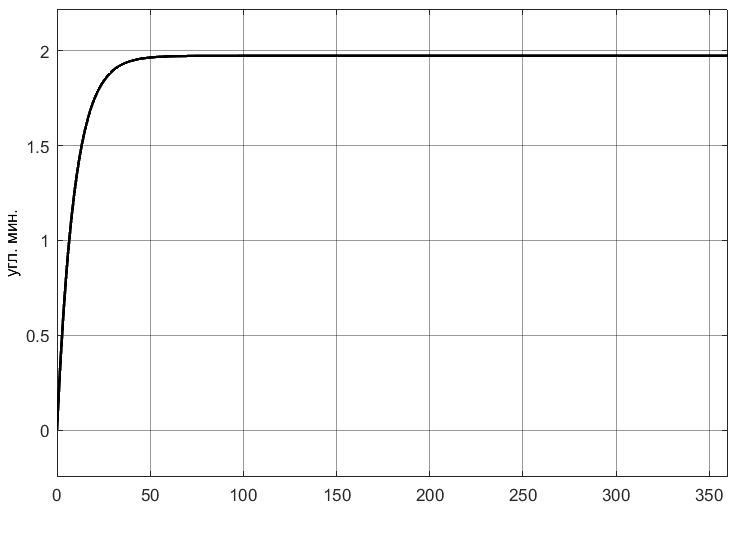
1. Прямолинейный полет с отсутствием виража и ускорения(
 ) (рис.1, рис.2)
) (рис.1, рис.2) 2. Прямолинейный полет с виражом и без ускорения (
 (рис.3, рис.4)
(рис.3, рис.4)3. Прямолинейный полет без виража и c ускорением (
 (рис.5, рис.6)
(рис.5, рис.6)4. Прямолинейный полет с виражом и с ускорением (
 (рис.7, рис.8)
(рис.7, рис.8)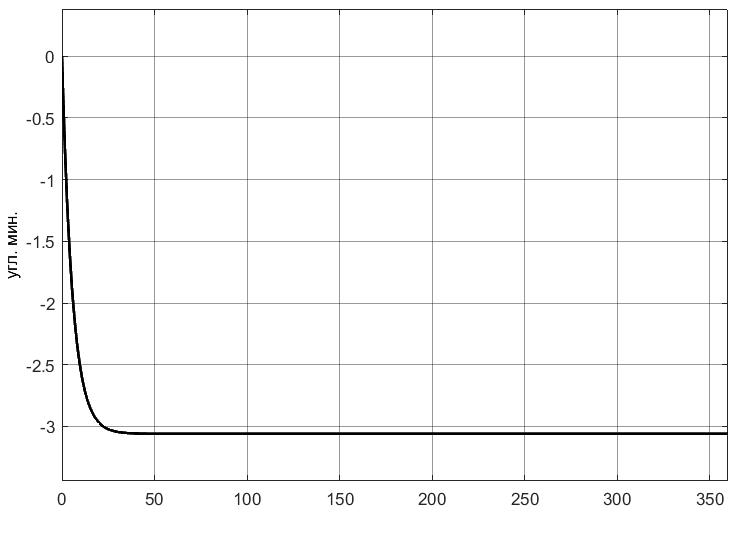
 5. Исследование влияния величины угловой скорости виража
5. Исследование влияния величины угловой скорости виража  , когда модуль путевой скорости постоянен(рис.9, рис.10)
, когда модуль путевой скорости постоянен(рис.9, рис.10)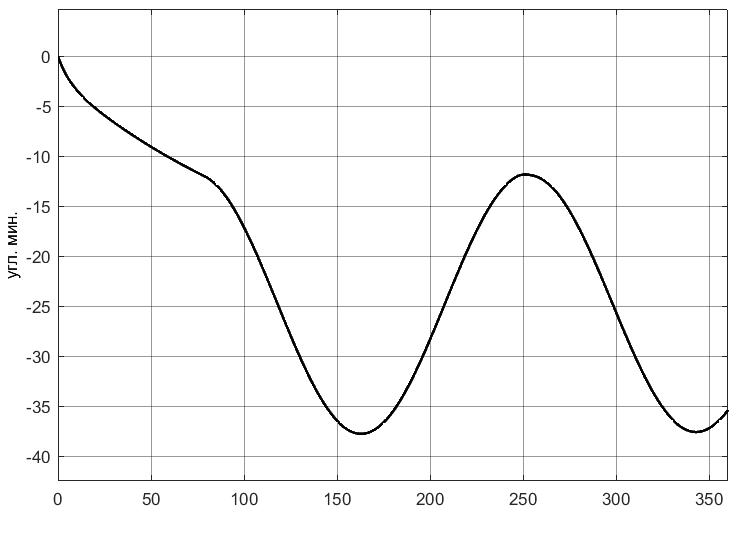
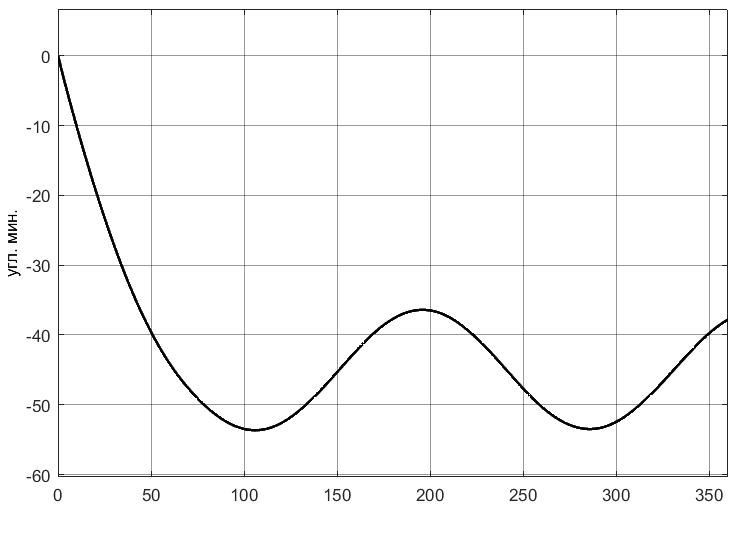 Рис.1. График изменения угла β
Рис.1. График изменения угла β  Рис.2. График изменения угла α
Рис.2. График изменения угла α Рис.3. График изменения угла β Рис.4. График изменения угла α
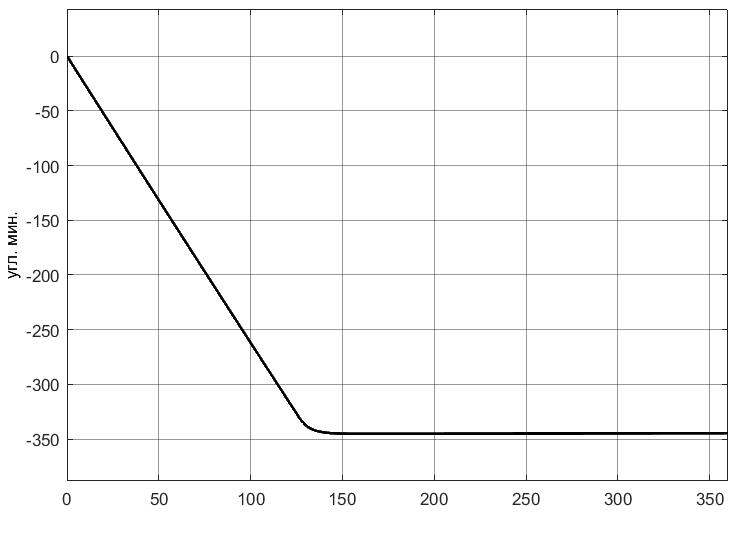
Рис.5. График изменения угла β Рис.6. График изменения угла α
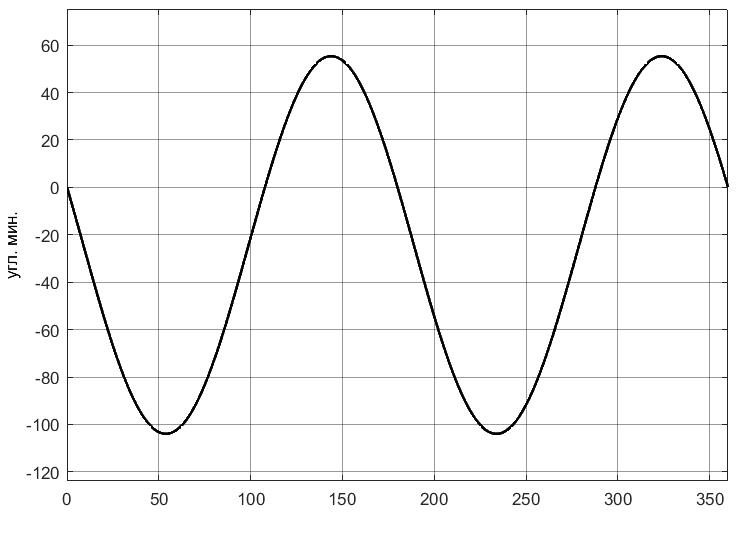
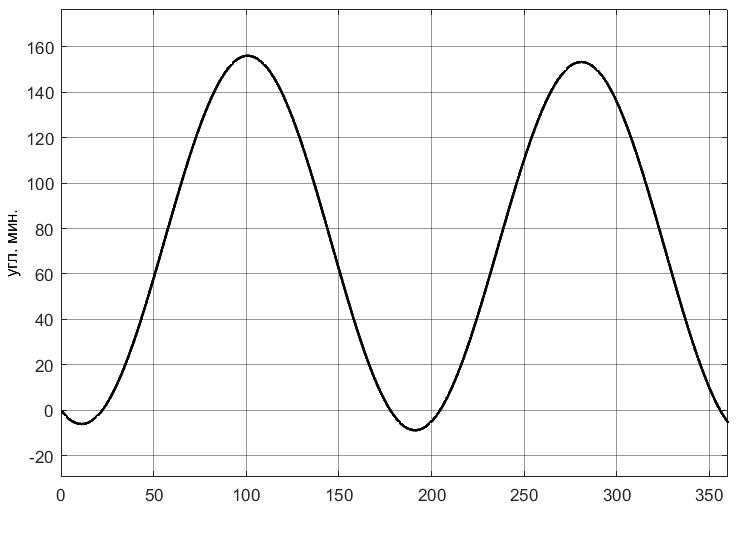 Рис.7. График изменения угла β Рис.8. График изменения угла α
Рис.7. График изменения угла β Рис.8. График изменения угла α
Рис.9. График изменения угла β Рис.10. График изменения угла α
По полученным прецессионным уравнениям была составлена модель ГВ в программе Matlab(Simulink), описывающая поведение ГВ в горизонтальном полете при различном маневрировании.
В данной работе рассмотрены разные случаи маневрирования: в режиме прямолинейного полета без виража и ускорения, в режиме прямолинейного полета с виражом и без ускорения и прямолинейный полет без виража и c ускорением. Была определена зависимость угла от угловой скорости виража.
1. Прямолинейное ускоренное движение с постоянным модулем путевой скорости и отсутствием угловой скорости
Установившиеся значение определяется моментами дрейфа, проекции угловых скоростей от вращения и облета земли, а также крутизной контуров коррекции, которые в данном случае работают в линейной зоне.
2. Движение в плоскости горизонта, представляющее разворот с угловой скоростью, когда модуль путевой скорости постоянен
При длительном вираже среднее значение по углу α = 25 угл. мин., а по углу β=45 угл. мин. Относительно этих значений происходят колебания с амплитудами
 и периодом Т=170
и периодом Т=170 3. Движение в плоскости горизонта, представляющее разворот без угловой скоростью
 , когда модуль путевой скорости не постоянен.
, когда модуль путевой скорости не постоянен.Установившиеся значение определяется моментами дрейфа, проекции угловых скоростей от вращения и облета земли, а также крутизной контуров коррекции, которые в данном случае работают в линейной зоне.
4. Движение в плоскости горизонта, представляющее разворот с угловой скоростью, когда модуль путевой скорости не постоянен
При длительном вираже среднее значение по углу α = 70 угл. мин., а по углу β=20 угл. мин. Относительно этих значений происходят колебания с амплитудами
 и периодом Т=100
и периодом Т=100 5. Прямолинейное ускоренное движение с постоянным модулем путевой скорости и отсутствием угловой скорости с постепенным увеличением повышения угловой скорости.
References:
1. Mikhailov O. I., Kozlov I. M., Gergel F. S. Aviasionnie pribory M, “Machinostroenie” (транслит.) [Aviation devices M, “Mechanical Engineering"(англ.)], 1977. – 416 p. – Text: direct. (in Russian).
2. Pel'por D. S. Giroskopicheskie sistemy (транслит.) [Gyroscopic Systems(англ.)], 1986. – 422 p. – Text: direct. (in Russian).
3. Danilin V. P. Giroskopicheskie pribory (транслит.) [Gyroscopic devices (англ.)], 1965. – 538s.
4. Vinogradov G. M., Krivosheev S. V. Dinamicheski nastraivaemye giroskopy (транслит.) [Dynamically adjustable gyroscopes (англ.)], 2008. – 127s.
Список литературы:
1. Михайлов О. И., Козлов И. М., Гергель Ф. С. Авиационные приборы М, “Машиностроение”, 1977. – 416 с. – Текст : непосредственный.
2. Пельпор Д. С. Гироскопические системы, 1986. – 422с. – Текст : непосредственный.
3. Данилин В. П. Гироскопические приборы, 1965. – 538с. – Текст : непосредственный.
4. Виноградов Г. М., Кривошеев С. В. Динамически настраиваемые гироскопы, 2008. – 127с. – Текст : непосредственный.

