Файл: Pendulum sensing element student Shilin Dmitry Andreevich.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 28.04.2024
Просмотров: 19
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
УДК 681.2-5
PENDULUM SENSING ELEMENT
Student Shilin Dmitry Andreevich,
associate Professor Krivosheev Sergey Valentinovich,
KNRTU-KAI
Kazan, Russian Federation
Abstract. In this work, a model of a liquid pendulum sensing element was obtained, as well as studies of the characteristics taking into account the condition obtained. The result of this work was the patent for the utility model of the Russian Federation No. 209332.
Keywords: pendulum, gyro stabilizer, damping, correction, stator, rotor.
Маятниковый чувствительный элемент
студент Шилин Дмитрий Андреевич,
доцент Кривошеев Сергей Валентинович,
КНИТУ-КАИ
г. Казань, Российская Федерация
Аннотация. В данной работе была получена модель жидкостного маятникового чувствительного элемента, а также проведены исследования характеристики c учетом получения условия. Результатом данной работы стал патент на полезную модель РФ №209332.
Ключевые слова: маятник, гиростабилизатор, демпфирование, коррекция, статор, ротор.
Маятниковый чувствительный элемент, содержащий маятник с воздушным демпфером в одноосном подвесе, на котором закреплен ротор датчика угла, а статор жестко установлен на корпусе, отличающийся, что демпфер является крыльчатым, жестко закреплен на маятнике и состоит из «N» плоских пластин с отверстиями, ориентированными своими плоскостями в направлении оси вращения, при этом датчик угла является индуктивным, а центр масс ротора датчика угла смещен относительно оси вращения в направлении создания нижней маятниковости, на корпусе устройства установлен сильфон, а внутренняя полость корпуса заполнена демпфирующей жидкостью.
Полезная модель относится к измерительной технике и может быть использована для измерения угла отклонения от местной вертикали, и в частности, в цепях коррекции гировертикалей.
Известен двухкоординатный электролитический маятник, [1, р.87], который представляет плоскую медную чашу, заполненную токопроводящей жидкостью с большим удельным электролитическим сопротивлением. Жидкости в чаше столько, что остается место для воздушного пузырька. Чаша закрыта крышкой из изоляционного материала и имеет внутренний сферический радиус. В крышку вмонтированы четыре контакта, площади которых и внутренний радиус крышки определяет зону пропорциональности, пятым контактом является сама медная чаша. Данный электролитический маятник используется качестве маятникового чувствительного элемента (МЧЭ) в системах продольной и поперечной коррекций гировертикалей. Информация об угле отклонения от вертикали содержится в изменении переходных сопротивлений диаметрально противоположных контактах в двух плоскостях.
Недостатком данного МЧЭ является незначительная линейность в выходном сигнале, взаимосвязь каналов при отклонении по перекрестной оси и практическое отсутствие демпфирования.
Известен однокоординатный жидкостный маятниковый датчик – ДЖМ-9Б [2, р. 49], который в качестве маятникового чувствительного элемента (МЧЭ) используется в системах продольной и поперечной коррекций гировертикалей и в системе горизонтальной коррекции гирополукомпаса. Датчик представляет стеклянную ампулу с тремя впаянными в нее платиновыми контактами с токоотводами. Колба заполнена незамерзающей токопроводящей жидкостью – насыщенный раствор хлористого лития в метиловом спирте так, что в ней остается воздушный пузырек, который при горизонтальном положении колбы одинаково перекрывает два информационных контакта, третий общий, всегда находится в жидкости. Информация об угле отклонения от плоскости горизонта (местной вертикали) содержится в изменении переходных сопротивлений диаметрально противоположных контактах относительно общего.
Хотя в ДЖМ-9Б устранено (сведено к минимуму) влияние канала на канал при применении двух датчиков, расположенных перпендикулярно, но недостаток – незначительная линейность выходного сигнала и практическое отсутствие демпфирования, остался так же, как и в ЖМП, при этом следует отметить как ЖМП, так и ДЖМ-9Б рационально подключаются к коррекционным моторам, которые в гировертикалях и гирополукомпасах работают на переменном токе.
Известен акселерометр прямого измерения АТ-1101 АТ-1102, отличающиеся только креплением [3], принятый за прототип, который состоит из кристаллической пластины-маятника, подвешенного в одноосном упругом кристаллическом подвесе, емкостного датчика угла, подвижные пластины которого являются ротором и нанесены на маятник, а неподвижные расположены на корпусе и являются статором датчика угла. Маятниковая пластина одновременно является воздушным демпфером. Для питания датчика угла и преобразования выходного сигнала к стандартному виду (5В на диапазон измерения) имеется встроенный микроэлектронный узел.
К недостаткам АТ-1101 следует отнести сложности построения систем коррекции гироскопических приборов на его основе в силу того

, что в них коррекционными моторами являются двухфазные индукционные двигатели, а также слабое демпфирование собственно маятника.
Технический результат, на достижение которого направлена полезная модель, заключается в повышении динамической точности за счет создания регулируемого демпфирования маятника с заданной зоной линейности выходного сигнала, что особенно важно при построении систем коррекции гироскопических приборов ориентации.
Технический результат достигается тем, что в маятниковом чувствительном элементе, содержащим маятник с воздушным демпфером в одноосном подвесе, на котором закреплен ротор датчика угла, а статор жестко установлен на корпусе, новым является то, что демпфер является крыльчатым, жестко закреплен на маятнике и состоит из “N” плоских пластин с отверстиями, ориентированными своими плоскостями в направлении оси вращения, при этом датчик угла является индуктивным, а центр масс ротора датчика угла смещен относительно оси вращения в направлении создания нижней маятниковости, на корпусе устройства установлен сильфон, а внутренняя полость корпуса заполнена демпфирующей жидкостью.
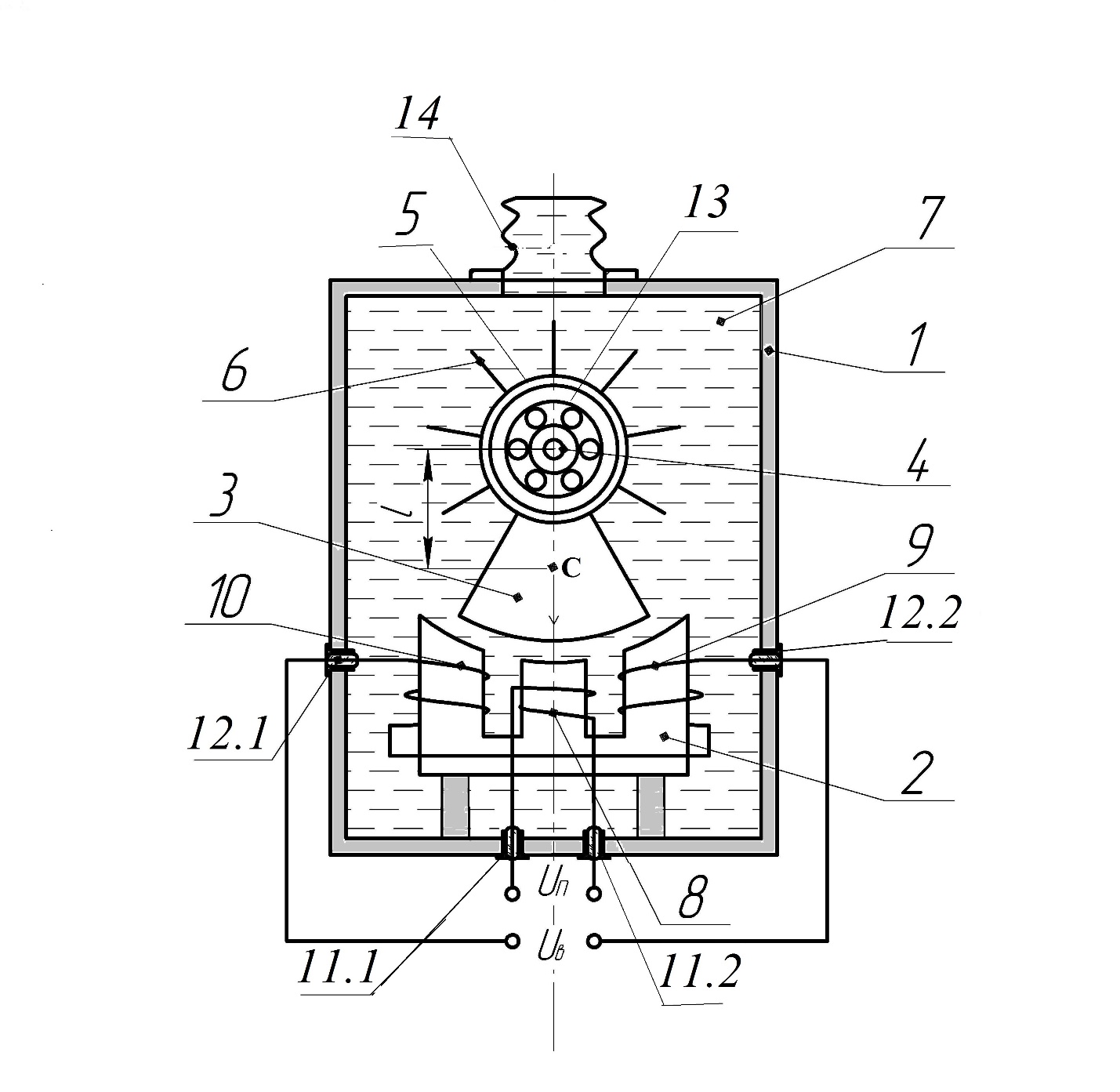
Фиг.1. Маятниковый чувствительный элемент
Пояснения к фиг.1, на которой изображен эскиз маятникового чувствительного элемента
1 – Корпус.
2 – Статор датчика угла.
3 – Ротор датчика угла (выполнен в виде маятника).
4 – Ось подвеса.
5 – Крыльчатый демпфер.
6 – Пластина крыльчатого демпфера.
7 – Демпфирующая жидкость.
8 – Обмотка питания.
9 – Обмотка сигнальная первая.
10 – Обмотка сигнальная вторая.
11.1 и 11.2 – Гермовводы обмотки питания.
12.1 и 12.2 – Гермовводы обмоток сигнальных.
13 – Опора подвеса.
14 – Сильфон.
На фиг.1 приняты следующие буквенные обозначения:
С – центр масс маятника.
l – смещение центра масс маятника относительно оси подвеса.
Uп – напряжение питания; UВ – напряжение выходное (сигнальных обмоток).
В соответствии с фиг.1 МЧЭ выполнен в виде маятникового датчика угла индуктивного типа и состоит из статора 2, жестко закрепленного на корпусе 1, и ротора датчика угла 3, установленного на оси вращения 4, например, в опоре подвеса 13. В данном варианте конструкции ось 4 неподвижна, а наружные кольца шарикоподшипников, на которые посажен ротор 3, могут вращаться. Ротор 3 имеет нижнюю маятниковость
ml, так как он специально выполнен несбалансированным. С ротором связан крыльчатый демпфер 5, состоящий из N (5 – 7) пластин 6, в которых для улучшения демпфирования имеются отверстия. Корпус 1 герметичный и заполнен демпфирующей жидкостью 7, например, смесь лигроина со спиртом. Жидкость 7, с одной стороны, разгружает опоры подвеса, повышая тем самым чувствительность МЧЭ, а, с другой стороны, она обеспечивает демпфирование движения ротора, что уменьшает динамическую погрешность. Регулируемое демпфирование обеспечивается на этапе проектирования и обеспечивается числом и конструкцией пластин крыльчатого демпфера. Конструктивно ротор 3 выполнен в виде сектора и состоит из пермаллоевых пластин. Статор 2 имеет, например, Ш – образную форму, на среднем стержне размещена обмотка питания (возбуждения) 8, а на крайних стержнях – соответственно обмотка сигнальная первая 9 и обмотка сигнальная вторая 10. Для подвода питания используются гермовводы обмотки питания 11.1 и 11.2, а для съема сигнала – гермовводы обмоток сигнальных12.1 и 12.2. Для компенсации изменения объема жидкости применен сильфон 14. Для ограничения угла отклонения ротора датчика угла 3 в пределах
 в конструкции должны быть предусмотрены упоры (на фиг.1 условно не показаны).
в конструкции должны быть предусмотрены упоры (на фиг.1 условно не показаны). МЧЭ работает следующим образом. При подаче напряжения
 переменного тока на обмотку возбуждения 8 создается пульсирующий магнитный поток, который замыкается через левый и правый стержни Ш- образного статора 2. Если ротор находится в среднем положении, когда
переменного тока на обмотку возбуждения 8 создается пульсирующий магнитный поток, который замыкается через левый и правый стержни Ш- образного статора 2. Если ротор находится в среднем положении, когда  , то площади перекрытия ротором 3 боковых стержней статора одинаковы, индуктивности сигнальных обмоток 9 и 10 одинаковы и соответственно в них будут наведены равные по амплитуде и отличающиеся на
, то площади перекрытия ротором 3 боковых стержней статора одинаковы, индуктивности сигнальных обмоток 9 и 10 одинаковы и соответственно в них будут наведены равные по амплитуде и отличающиеся на  напряжения (ЭДС).
напряжения (ЭДС). При отклонении корпуса 1 от плоскости местного горизонта (местной вертикали) ротор датчика угла 3 также отклоняется на угол
 . Например, при отклонении корпуса 1 влево ротор также отклонится влево. При этом левый стержень Ш-образного статора 2 будет перекрыт ротором больше на величину
. Например, при отклонении корпуса 1 влево ротор также отклонится влево. При этом левый стержень Ш-образного статора 2 будет перекрыт ротором больше на величину  , а правый стержень соответственно меньше на такую же величину. Следовательно, индуктивность левого стержня увеличится, а правого уменьшится на одинаковую величину, что приведет увеличению амплитуды ЭДС на второй (левой) сигнальной обмотке 10 и, соответственно, к уменьшению амплитуды ЭДС на первой (правой) сигнальной обмотке 9. Таким образом, напряжения на сигнальных обмотках будут равны
, а правый стержень соответственно меньше на такую же величину. Следовательно, индуктивность левого стержня увеличится, а правого уменьшится на одинаковую величину, что приведет увеличению амплитуды ЭДС на второй (левой) сигнальной обмотке 10 и, соответственно, к уменьшению амплитуды ЭДС на первой (правой) сигнальной обмотке 9. Таким образом, напряжения на сигнальных обмотках будут равны
 ,
,где
 – амплитуда при нулевом отклонении ротора;
– амплитуда при нулевом отклонении ротора;  – частота питающего напряжения;
– частота питающего напряжения;  – коэффициент пропорциональности, который будет зависеть от электрических, геометрических и магнитных параметров магнитной цепи и обмоток.
– коэффициент пропорциональности, который будет зависеть от электрических, геометрических и магнитных параметров магнитной цепи и обмоток.При дифференциальной схеме включения сигнальных обмоток выходное напряжение будет равно
 .
.Возможны также другие варианты использования ЭДС сигнальных обмоток, например, мостовая схема.
Порог чувствительности маятникового датчика угла будет определяться остаточным моментом трения и небаланса, а зона пропорциональности будет в основном зависеть от геометрических размеров боковых стержней Ш-образного статора и радиуса ротора
 ,
,
Применение и реализация.
Предлагаемый МЧЭ можно применять, например, в одноосных горизонтальных гиростабилизаторах, в которых для компенсации виражных погрешностей применен маятниковый датчик угла с зоной линейности порядка 10 градусов.
Для проверки работоспособности был изготовлен макет МЧЭ на базе датчика угла, который применен в системе стабилизации следящей рамы авиагоризонта АГД-1 [4, р. 98]. Заданная зона линейности будет определяться конструкцией – геометрическими параметрами магнитной системы датчики угла.
При определенной миниатюризации маятникового датчика угла можно спроектировать МЧЭ, который по габаритам будет не больше, чем АТ-1101 (АТ-1102), а по стоимости значительно меньше, который может заменить в пилотажных авиагоризонтах электролитические МЧЭ.
References:
1. Mikhailov O. I., Kozlov I. M., Gergel F. S. Aviasionnie pribory M, “Machinostroenie” (транслит.) [Aviation devices M, “Mechanical Engineering"(англ.)], 1977. – 416 p. – Text: direct. (in Russian).
2. Sistema kursovertikali tipa SKV-2N. Rukovodstvo po ekspluatacii i tekhnicheskomu obsluzhivaniyu M, “Mashinostroenie” (транслит.) [The system of the exchange rate of the type SKV-2N. Operation and maintenance manual M, “Mechanical Engineering" (англ.)], 1975. – 304 p. (in Russian).