ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.05.2024
Просмотров: 27
Скачиваний: 0

Лабораторна робота №12
Моделювання аналогового сигналу в Matlab| і Simulink|
Теоретична частина.
1. Дискретизація сигналів
Зазвичай всі сигнали є аналоговими. Щоб використовувати аналоговий сигнал в цифрових системах необхідно перетворити аналоговий сигнал в цифровий. Цей процес складається з дискретизації і квантування.

Мал. 5.1. Перетворення аналогового сигналу в цифровій
Процес перетворення аналогового сигналу в дискретний називається дискретизацією.
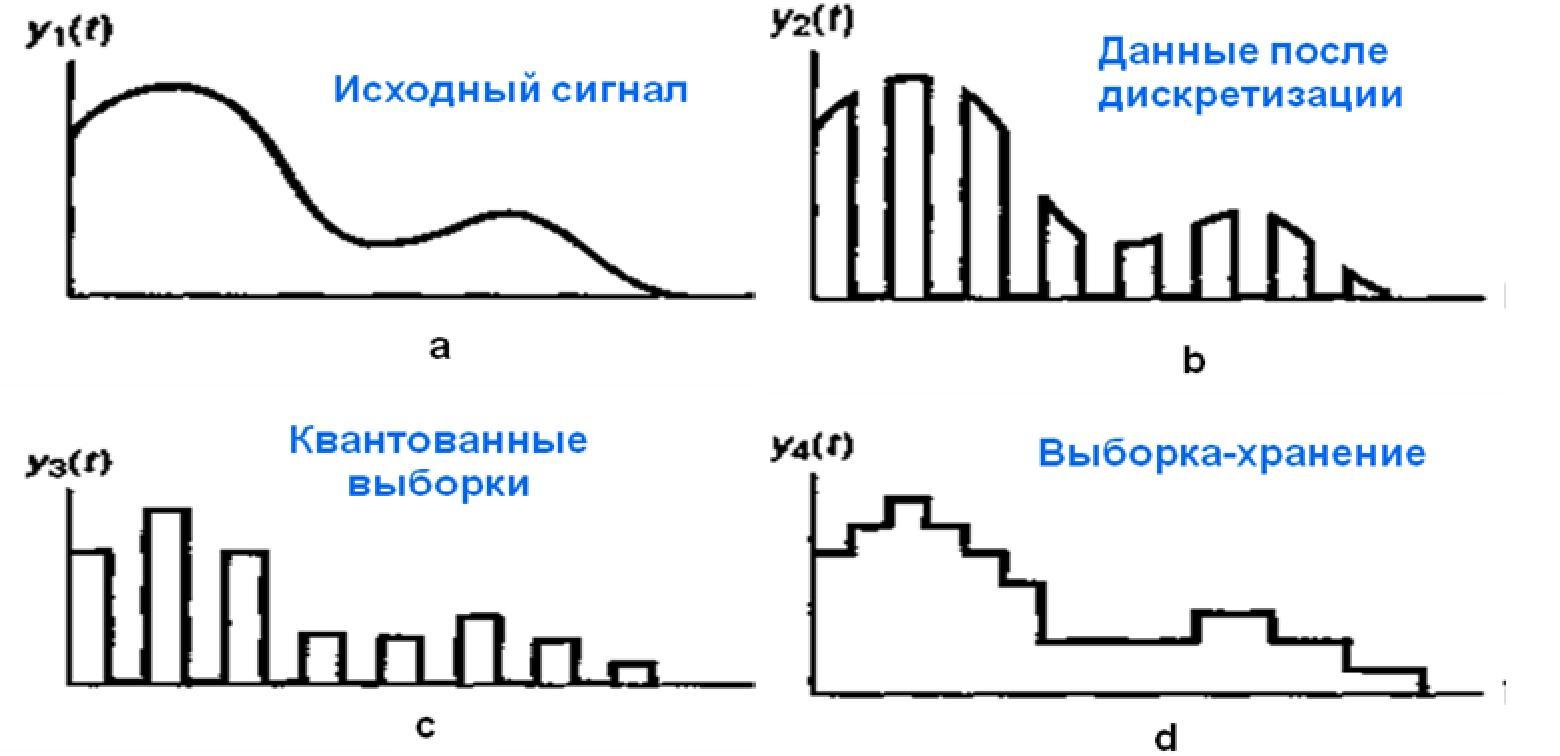
Мал. 5.2. Дискретизація сигналу
2. Моделювання дискретних сигналів в Matlab|
Генерувати сигнали в Matlab| можна трьома способами:
-
у діалоговому режимі, за допомогою послідовності команд в командному вікні;
-
у автоматичному режимі, шляхом створення і запуску на виконання m-скрипта|;
-
у автоматичному режимі, шляхом створення і виклику m-функції|.
Генерування сигналів в діалоговому режимі.
Цей спосіб найбільш трудомісткий, оскільки вимагає кожну команду набирати з клавіатури в командному вікні. Щоб підвищити продуктивність праці, можна всю послідовність команд заздалегідь набрати в будь-якому текстовому редакторові (звичайно це Notebook| або Word|), а потім, скопіювавши текст в буферну пам'ять (Clipboard|), вставити його в командне вікно. Недолік цього способу в тому, що необхідно одночасно тримати активними дві програми – Matlab| і текстовий редактор. Гідність даного способу виявляється тоді, коли роботу в Matlab| проводять, слідуючи якійсь інструкції, в якій теоретичні відомості чергуються з практичними завданнями у вигляді фрагментів текстів m-скриптів|.
Генерування сигналів шляхом створення m-скрипта|. Даний спосіб відрізняється тим, що всі команди набираються в спеціальному вікні редактора m-файлів| (рис.5.3).
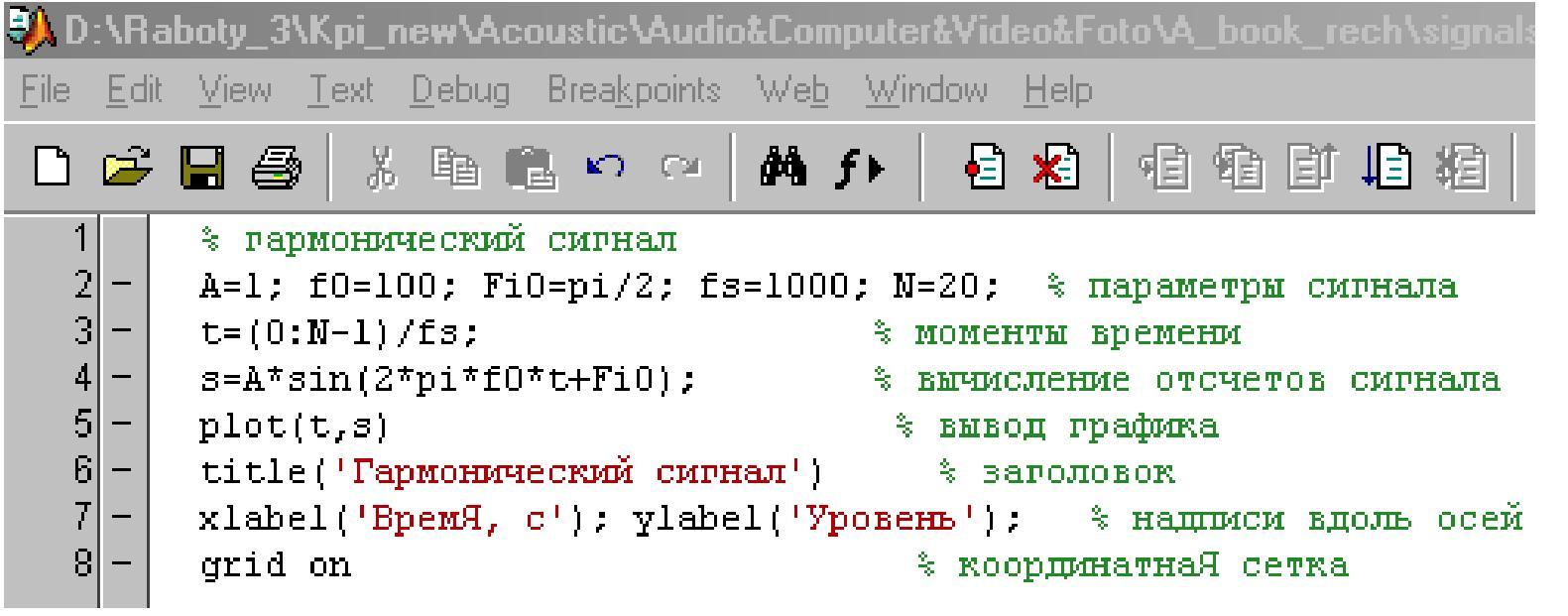
Мал. 5.3. Вікно редактора т-файлов|
Даний спосіб хороший тим, що замість сторонніх програмних продуктів використовується власний інструментарій Matlab|, спеціалізований для написання і відладки т-скриптів|.
Генерування сигналів шляхом
створення m-функції|.
Даний спосіб відрізняється
тим, що вхідні дані записують як аргумент
якоїсь функції
![]() а
вихідні - як значення цієї функції.
Зручність в тому, що символьні позначення
даних можуть відрізнятися від позначень,
використовуваних в тілі функції. Більш
того, числові значення вхідних даних
можна просто задавати в найменуванні
функції, що викликається.
а
вихідні - як значення цієї функції.
Зручність в тому, що символьні позначення
даних можуть відрізнятися від позначень,
використовуваних в тілі функції. Більш
того, числові значення вхідних даних
можна просто задавати в найменуванні
функції, що викликається.
3. Моделювання обробки сигналів в Simulink|
Simulink| забезпечує надзвичайно обширні можливості створення програм обробки сигналів для сучасних наукових і технічних застосувань.
Що підключається до Simulink| могутня підсистема імітаційного моделювання в реальному масштабі часу (за наявності додаткових апаратних засобів у вигляді плат розширення комп'ютера), представлена пакетами розширення Real| Time| Windows| Target| і Workshop|, — могутній засіб управління реальними об'єктами і системами. Гідністю такого моделювання є його математична і фізична наочність. У компонентах моделей Simulink| можна задавати не тільки фіксовані параметри, але і математичні співвідношення, що описують поведінку моделей.
Пакет може застосовуватися, зокрема, в таких областях, як обробка аудіо-| і відеоінформації, телекомунікації, геофізика, завдання управління в реальному режимі часу, економіка, фінанси і медицина.
Завдання до роботи:
Завдання
1.
Згенерувати сигнал
![]() на
виході моделі (з частотою дискретизації
Fs|),
якщо на вхід подається сигнал:
на
виході моделі (з частотою дискретизації
Fs|),
якщо на вхід подається сигнал:
![]() .
.
Генерацію сигналу реалізувати в середовищі Matlab| шляхом створення т-функції|
Завдання
2.
Згенерувати цей же сигнал
![]() але
генерацію сигналу реалізувати
в середовищі Simulink|.
але
генерацію сигналу реалізувати
в середовищі Simulink|.
Порівняти результати моделювання в середовищах Matlab| і Simulink|.
Варіанти:

Параметри сигналу
|
Варіант
Параметр |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
A1| |
1 |
1 |
2 |
1 |
1 |
1 |
1 |
2 |
|
A2| |
1 |
2 |
1 |
1 |
1 |
2 |
2 |
1 |
|
|
100 |
100 |
100 |
100 |
100 |
100 |
100 |
100 |
|
|
200 |
200 |
200 |
200 |
200 |
200 |
200 |
200 |
|
|
0 |
0 |
0 |
0 |
р |
0 |
р |
0 |
|
|
0 |
0 |
0 |
р |
0 |
р |
0 |
р |
Частота
дискретизації
![]()
Методичні вказівки:
-
Сигнал може генеруватися двох типів: безперервний і дискретний. Для моделювання роботи безперервних систем рекомендують використовувати безперервний тип time-based|, а для моделювання роботи дискретних систем - дискретний тип sample-based|
-
Якщо встановлений тип time-based|, тоді параметр Sample| time| може приймати значення:
-
0 (за умовчанням) - блок працює в безперервному режимі;
-
>0 - блок працює в дискретному режимі;
-
-1 - блок успадковує той же режим, що і приймаючий блок.
-
Дискретизацію сигналу в безперервному режимі можна реалізувати за допомогою блоку Zero-Order| Hold|.
Блок Zero-Order| Hold| можна трактувати як “дискретизатор|”, тобто частину АЦП, відповідальну за дискретизацію сигналу. Іноді блок Zero-Order| Hold| іменують АЦП. У блоці Zero-Order| Hold|, проте, квантування не проводиться.
-
Робота в дискретному режимі (sample-based|) примушує блок поводитися так, як якби до виходу безперервного генератора був приєднаний блок Zero-Order| Hold|. Зібравши дві схеми (рис.5.4) і задавши в обох випадках значення параметра Sample| time|, рівне 0.5 (рис.5.5), отримуємо ідентичні результати (рис.5.6).
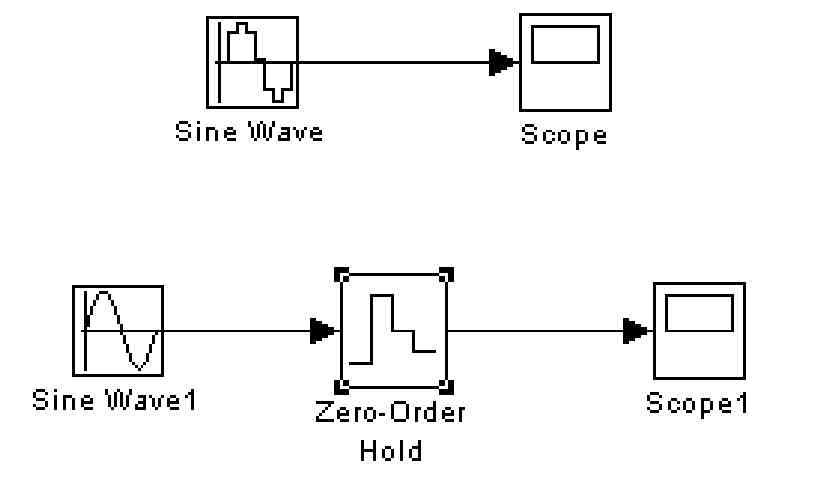
Мал. 5.4. Схеми, зібрані в безперервному і дискретному режимах
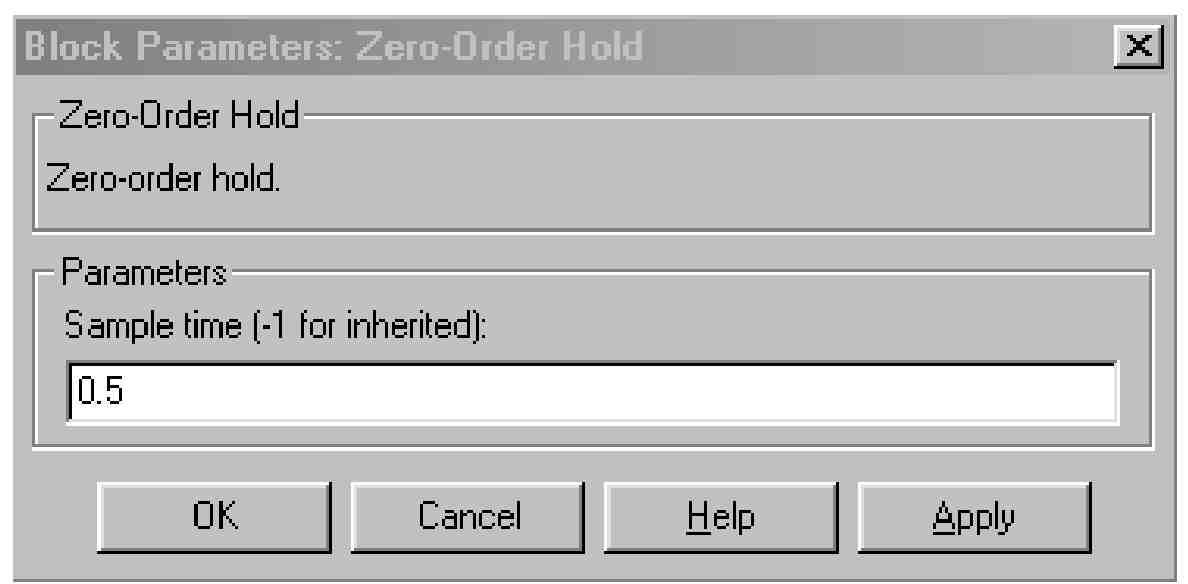
Мал. 5.5. вікно настройки блоку Zero-Order| Hold|
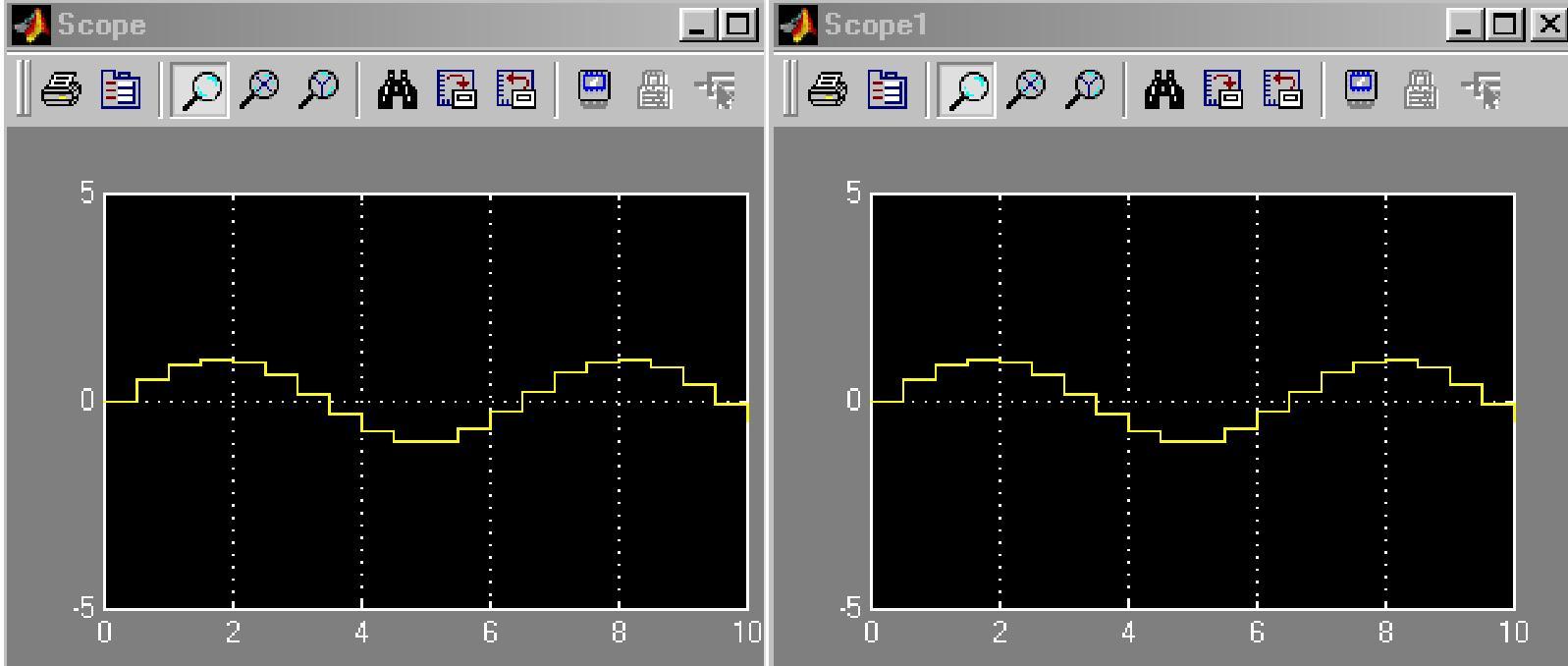
Мал. 5.6. Графіки на екранах осцилографів в безперервному і дискретному режимах
Сигнал роботі блоку генерації в режимі безперервного часу має вид гладкої функції часу, а в режимі дискретного часу - вид ступінчастого сигналу, такого, неначебто до виходу генератора плавного сигналу був приєднаний блок Zero-Order| Hold|, що є дискретизатором| типу “відлік-зберігання”.
Іншими словами, задаючи режим дискретного часу, ми йдемо від необхідності у використанні блоку Zero-Order| Hold|.
-
Побудова графіків.
Крім блоку Scope|, графік можна побудувати і за допомогою блоку X-Y-Graf|, на верхній вхід X якого потрібно подати послідовність моментів часу за допомогою блоку Clock| (годинник), а на нижній вхід Y – значення сигналу, що генерується (мал.5.7).
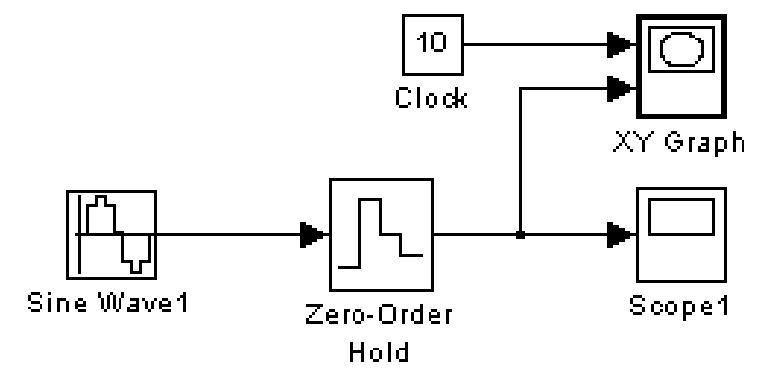
Мал.5.7. Використання блоку X-Y-Graf| для побудови сигналу
В результаті попередній настроєний (у відповідному вікні настройки задаються граничні значення аргументу і функції, а також указується значення параметра Sample| time|) графічний пристрій видасть показаний графік (рис.5.8, а), якщо для блоку X-Y-Graf| задане Sample| time=-1| (тобто період дискретизації успадковується).
Графік буде декілька іншим (рис.5.8, b), якщо для блоку X-Y-Graf| задане Sample| time=0.5.
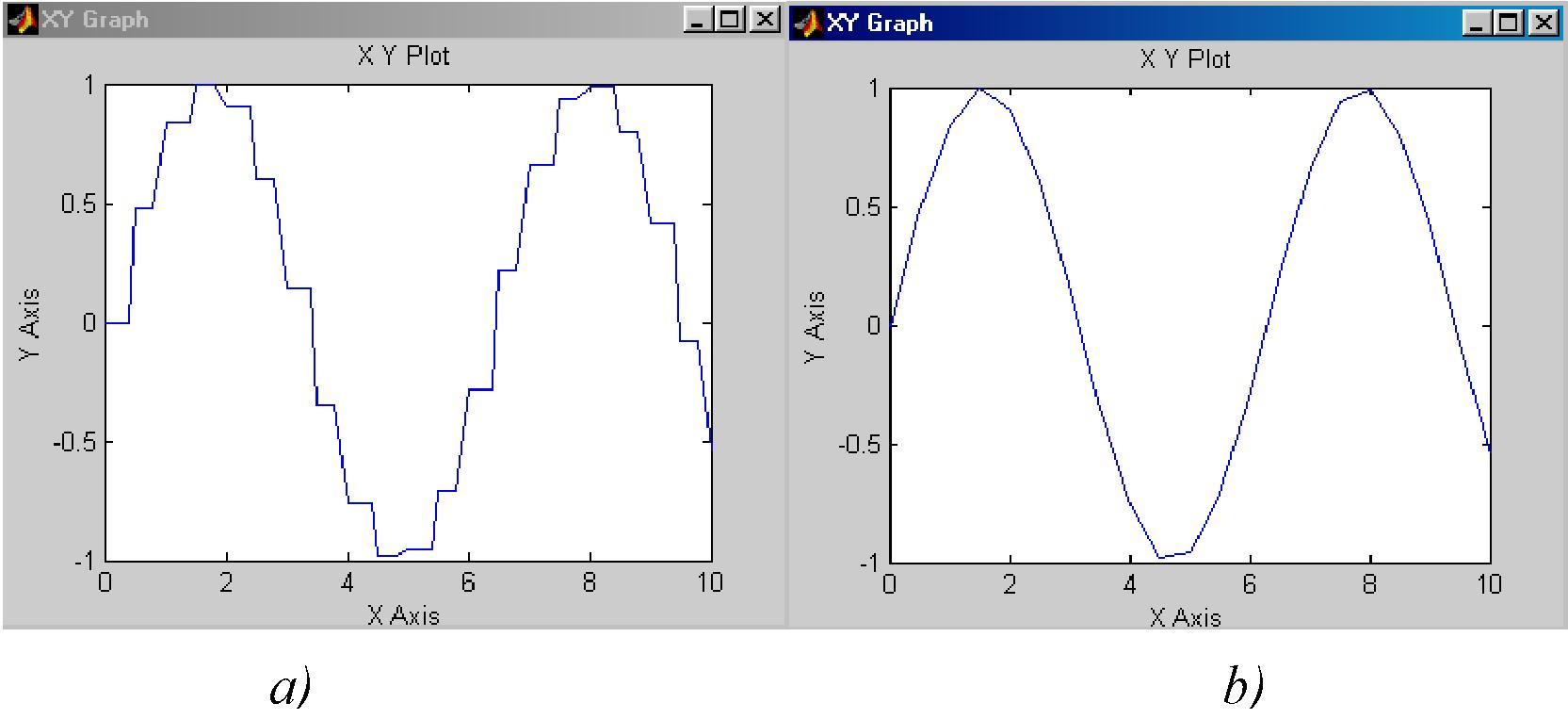
Мал. 5.8. Результат побудови графіка сигналу при різних парметрах| Sample| time|