ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.05.2024
Просмотров: 24
Скачиваний: 0

Лекція 8
Тема: Системологія прийняття рішень
Мета: встановити цілі системології прийняття рішень; знати основні терміни, формули СПР, навчитися розрізняти класи СПР за ознаками; визначити зв’язок між СПР та СШІ.
План
-
Основна термінологія СПР.
-
Класифікація СПР.
-
Структура та функції СПР.
-
Основна термінологія та класифікація спр
Сучасна теорія прийняття рішень розглядає узагальнену процедуру прийняття рішень як інформаційний синтез абстрактної системи, що забезпечує досягнення заданої цілі.
Абстрактною
системою
![]() називається множина
називається множина
![]() елементів, на якій реалізовано множину
відношень (зв’язків)
елементів, на якій реалізовано множину
відношень (зв’язків)
![]() ,
що впорядковують елементи в структуру
,
що впорядковують елементи в структуру
![]() (1)
(1)
Структура
(1) є нецілеспрямованою системою, оскільки
вона не враховує множину властивостей
![]() ,
якими наділені елементи системи. Далі
будемо розглядати тільки цілеспрямовані
системи.
,
якими наділені елементи системи. Далі
будемо розглядати тільки цілеспрямовані
системи.
Цілеспрямованою
називається система
![]() ,
яка має впорядковану структуру
,
яка має впорядковану структуру
![]() .
.
СПР називається система, яка побудована на основі електронно-обчислювальної техніки і безпосередньо моделює когнітивні процеси, притаманні людині при прийнятті рішень.
СПР є обов’язковою важливою складовою частиною інтелектуальних систем різного призначення. У багатьох автоматизованих системах керування складними об’єктами та процесами СПР застосовується як система підтримки прийняття рішень (СППР). При цьому термін “підтримка” стосується таких систем, де вирішальне слово належить особі, що приймає рішення (ОПР).
За існуючими стандартами під функціонуванням СПР розуміється процес виконання системою заданого робочого алгоритму при використанні системи за призначенням, тобто за критерієм цілі створення системи.
Об`єднання широкого класу інтелектуальних систем поняттям СПР, не враховуючи їх відмінність за призначенням, обсягом інформаційних і обчислювальних функцій і складом комплекса технічних засобів (КТЗ), дозволяє з єдиних методологічних і теоретичних положень розробляти теорію їх проектування відповідно до принципів системного підходу.
2. Класифікація спр.
За ступенем інтелектуалізації СПР можна поділити так:
-
системи перебору варіантів рішень згідно з встановленою пріоритетністю для наперед змодельованих ситуацій;
-
СПР, що приймають рішення за детермінованими вирішальними правилами без навчання;
-
СПР, що реалізують алгоритми компараторного розпізнавання за еталонами;
-
експертні системи, що з метою прийняття ефективних рішень маніпулюють спеціальними знаннями, накопиченими фахівцями-експертами у конкретно-предметній галузі знань;
-
СПР, що навчаються;
-
знання-орієнтовані (knowledge-based) СПР, що здатні утворювати базу знань;
Здатні навчатися СПР можна поділити на такі основні класи:
-
СПР, що розв’язують задачу розпізнавання образів за апріорно класифікованою навчальною матрицею (навчання з “учителем”);
-
СПР, що реалізують алгоритми факторного класифікаційного аналізу ;
-
СПР, що реалізують алгоритми кластер-аналізу при незмінному словнику ознак і за апріорно некласифікованими навчальними матрицями, тобто за умови неповної апріорної інформації про функціональний стан системи (навчання без “учителя”);
-
СПР, що самонавчаються, які реалізують алгоритми автоматичної класифікації за апріорно некласифікованими навчальними матрицями, але здатні оптимізувати параметри словника ознак розпізнавання ;
-
відмовостійкі СПР, що здатні самостійно діагностувати свій функціональний стан і відновлювати свою функціональну спроможність при виникненні відмов;
-
адаптивні СПР, що здійснюють класифікаційне самонастроювання та самоорганізацію системи;
-
томографічні СПР, що відновлюють щільність перерізу об’єкта за його проекціями;
-
СПР, що вирішують проблему шкалювання, яка полягає в побудові для шкал з різними мірами виміру зведеної шкали, координати якої можуть бути обернено відображені на відповідні вихідні шкали;
-
сенсорні СПР, що моделюють чуттєві функції людини і комплекс технічних засобів (КТЗ) яких базується на “образному” комп’ютері, наділеному властивостями “технічного зору”, усномовного розпізнавання, розпізнавання пахощів та інше;
-
гібридні СПР, які поєднують різні алгоритми та методи автоматичної класифікації.
До знання-орієнтованих СПР за сучасною класифікацією належать:
-
системи, що ґрунтуються на інструктивних знаннях (rulebased reasoning);
-
системи, що ґрунтуються на автоматичному доведенні теорем (automatic theorem-proving techniques);
-
системи, що ґрунтуються на автоматичному породженні гіпотез (automatic hypothesizing);
-
системи, що ґрунтуються на доведенні за аналогією (analogical reasoning);
-
об’єктно-орієнтовані інтелектуальні системи (object-oriented intelligent systems);
-
об’єктно-логічні інтелектуальні системи, що поєднують окремі переваги об’єктно-орієнтованих систем з системами автоматичного доведення теорем і використовують об’єктно-логічні мови, фреймові логіки (F-logics), логіки транзакції (transaction logics) та інше.
Зрозуміло, що наведена класифікація не є досить повною, оскільки відбувається неперервне розширення номенклатури СПР як за призначенням, так і за принципами функціонування.
Існують такі основні підходи до аналізу та синтезу СПР:
-
алгебраїчний;
-
теоретико-статистичний;
-
геометричний;
-
структурний (лінгвістичний);
-
біонічний (нейромережний);
-
мережний;
-
нечіткий;
-
теоретико-ігровий.
Незважаючи на те, що наведені підходи відрізняються один від одного рівнем і видом математичної формалізації слабо формалізованих процесів прийняття рішень, між ними не існує чіткої межі, а самі підходи часто доповнюють один одного. Оскільки всі основні підходи, крім алгебраїчного, перетинаються з геометричним, то саме в рамках геометричного підходу формування загальної теорії прийняття рішень є найбільш виправданим.
3. Структура та функції спр
На рис. 1 показано узагальнену функціональну схему здатної навчатися СПР. Тут функціональні блоки, що знаходяться зверху пунктирної лінії, належать безпосередньо до СПР. Показана на рис. 1 структура СПР дозволяє функціонувати системі у режимах як навчання, так і екзамену.
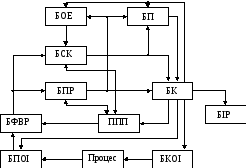

Рисунок 1 – Узагальнена функціональна схема СПР, що навчається
Робота системи в режимі навчання регламентується програмно блоком керування (БК), який при кожному випробуванні видає команду на блок кінцевої обробки інформації (БКОІ) для вироблення ініціюючої дії на виконавчі органи. Блок первинної обробки інформації (БПОІ) перетворює інформацію про функціональний стан процесу керування до вигляду, зручного для подальшого оброблення ЕОМ, і передає її у блок формування векторів розпізнавання (БФВР), що є автоматом допускового контролю. Із пристрою постійної пам’яті (ППП) у БФВР за командами БК надходять значення контрольних допусків на ознаки розпізнавання, які порівнюються із виміряними значеннями відповідних ознак. У результаті кожного випробування на виході БФВР формується структурований випадковий двійковий вектор-реалізація образу, координати якого є предикатами, що набувають значення "1", якщо значення відповідної ознаки знаходиться в полі контрольних допусків, і "0", якщо не знаходиться.
Вектор-реалізація образу надходить у блок прийняття рішень (БПР), де визначається його належність деякому класу розпізнавання, і в блок статистичної корекції (БСК), який визначає оптимальні значення параметрів функціонування СПР шляхом пошуку максимуму КФЕ навчання системи розпізнавати реалізації відповідного образу. КФЕ обчислюється блоком оцінки ефективності (БОЕ).
Режим екзамену виконується безпосередньо в робочому режимі функціонування системи. При цьому БСК і БОЕ не функціонують, але може підключатися блок прогнозування (БП), призначений для прогнозування зміни функціонального стану СПР. Для спостереження і реєстрації інформації служить блок індикації і реєстрації (БІР).

