Файл: Забайкальский институт железнодорожного транспорта.docx
Добавлен: 19.10.2024
Просмотров: 12
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Иркутский государственный университет путей сообщения»
(ФГБОУ ВО ИрГУПС)
Забайкальский институт железнодорожного транспорта
- филиал Федерального государственного бюджетного образовательного учреждения высшего образования «Иркутский государственный университет путей сообщения»
(ЗабИЖТ ИрГУПС)
Факультет очного обучения
Кафедра «Электроснабжение»
| К ЗАЩИТЕ ДОПУСКАЮ к.т.н., доцент Менакер К. В. «___»_________2021 г._________ |
РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ УСТРОЙСТВАМИ ОПЕРАТИВНОГО ВКЛЮЧЕНИЯ И ОТКЛЮЧЕНИЯ ЭЛЕКТРОУСТАНОВОК
Курсовая работа
по дисциплине «Микропроцессорные информационно-управляющие системы»
КР.510620.23.05.05.067-2021.ПЗ
| ИСПОЛНИТЕЛЬ студент гр. СОД.1-17-1 Нестеров К.В. «____»________2021 г.________ | РУКОВОДИТЕЛЬ РАБОТЫ доцент Менакер К.В. «____»________2021 г._________ |
| | |
| | |
Чита 2021
Аннотация
Курсовая работа 27 с., 4 рис., 11 табл., 2 источника, 3 прил.
МИКРОКОНТРОЛЛЕР, ARDUINO, ОБЪЕКТ КОНТРОЛЯ, ОБЪЕКТ УПРАВЛЕНИЯ, УСТРОЙСТВО УПРАВЛЕНИЯ, ОПЕРАТИВНОЕ ВКЛЮЧЕНИЕ, ОПЕРАТИВНОЕ ОТКЛЮЧЕНИЕ, ЭЛЕКТРОУСТАНОВКА, ВЫКЛЮЧАТЕЛЬ, РАЗЪЕДИНИТЕЛЬ.
Целью курсовой работы является изучение принципов составления алгоритмов и программ для решения задач, связанных с обработкой и обменом информацией на базе микроконтроллера ATMega328, а именно Arduino.
Нормативные ссылки
В настоящей работе использованы ссылки на следующие стандарты:
РД 34.35.310-97. Общие технические требования к микропроцессорным устройствам защиты и автоматики энергосистем;
Правила устройств систем тягового электроснабжения. –2002г;
Правила устройств электроустановок. – 7 изд. –2003г.
ГОСТ 18397.86 – Выключатели переменного тока на номинальное напряжение 6 – 220 кВ для коммутационных операций;
ГОСТ 7746-2001. Трансформаторы тока. Общие технические условия;
ГОСТ 1983-2001. Трансформаторы напряжения. Общие технические условия;
ГОСТ Р 52726-2007 Разъединители и заземлители переменного тока на напряжение свыше 1 кВ и приводы к ним. Общие технические условия (с Поправкой)

Условные обозначения и сокращения
МК – микропроцессорный контроллер;
МИУС – микропроцессорные управляющие системы;
СУУ – система управления устройствами;
ОК – объект контроля;
ОУ – объект управления;
ОУК – объект контроля и управления;
УУ – устройства управления;
ТТ - трансформатор тока;
ТН - трансформатор напряжения.

Содержание
| Введение | 6 |
| 1 Задание на курсовую работу | 7 |
| 2 Краткие теоретические сведения | 8 |
| 3 Выбор оборудования | 12 |
| 4 Разработка микропроцессорной системы управления | 14 |
| 4.1 Описание объектов управления и объектов контроля | 14 |
| 4.2 Алгоритм работы СУУ | 17 |
| Заключение | 19 |
| Список литературы | 20 |
| Приложение А | 21 |
| Приложение Б | 22 |
| Приложение В | 23 |
Введение
Особенностью микропроцессорных информационно-управляющих систем и устройств железнодорожного транспорта (МИУС) является широкое применение микропроцессорных контроллеров (МК).

С помощью Arduino можно реализовать практически любой замысел. Это может быть автоматическая система управления поливом, или веб-сервер, или даже автопилот для мультикоптера. Итак, Arduino - это платформа для разработки устройств на базе микроконтроллера, на простом и понятном языке программирования в интегрированной среде Arduino IDE.
Arduino UNO представляет из себя отладочный комплекс, выполненный на базе микроконтроллера ATMega328. Проще говоря – это, обычная плата, которая является «посредником» между пользователем и микроконтроллером, позволяя удобно цепляться к его ножкам и загружать в него прошивку прямо из среды программирования. Помимо всего прочего, плата наделена некоторыми дополнительными функциями.
Arduino UNO была разработана итальянскими инженерами как одна из основных плат, имеющих открытую архитектуру. По мере увеличения популярности, у платы появилось множество «клонов», полностью совместимых по программной и аппаратной части.
В данной курсовой работе используем Arduino для разработки системы управления устройствами оперативного включения и отключения электроустановок.
Целью выполнения настоящей курсовой работы является изучение принципов составления алгоритмов и программ для решения задач, связанных с обработкой и обменом информацией на микроконтроллерах семейства Arduino.
1 Задание на курсовую работу
1. Начертить принципиальную схему микропроцессорной системы управления в исходном состоянии, когда команда на включение выключателя и разъединителей еще не поступала.
2. Составить алгоритм работы МК от момента поступления в память МК команды на включение выключателя, до запуска всей системы.
Однолинейная схема представлена на рис. 1 для всех вариантов.
Рисунок 1.1 - Однолинейная схема выключения трансформатора
Таблица 1.1 – Исходные данные
| Последняя цифра шифра студента | Предпоследняя цифра шифра студента | |||
| 7 | 6 | |||
| UВН, кВ | UНН, кВ | P, кВт | Тип оп. пер. | Вход мультиплексора |
| 220 | 35 | 16 | Вкл. | 0 |
Примечание: в данной работе мультиплексоры не использованы;
оперативное переключение выполнено полное (и включение, и выключение).
2 Краткие теоретические сведения
Разработка принципиальной схемы системы управления оперативными схемами осуществляется в два этапа. На первом этапе осуществляется анализ общей структуры СУУ, выясняется специфика управления, а на втором этапе - производится синтез принципиальной схемы СУУ и алгоритмического обеспечения к ней.
Общая структура СУУ может быть представлена аналогично структуре большинства систем управления, применяемых в технике. Она изображена на рисунке 2.1. Основными элементами являются: объекты контроля и управления (ОУК), объекты контроля (ОК) и управляющее устройство (УУ). Перед началом анализа системы управления следует выяснить смысл понятий «объект контроля», «объект управления» и «управление».
Под «объектом контроля» (ОК) в общем случае понимается физический объект, либо группа физических объектов, состояние которых требуется учитывать при реализации некоторого процесса управления. В СУУ в качестве таких объектов обычно выступают выключатели, разъединители, ТТ и ТН.
Под «объектом управления» (ОУ) понимается физический объект, либо группа физических объектов, состояние которых требуется изменять в заданном направлении.
Объектами контроля и управления являются объекты, которые включают все свойства как ОК, так и ОУ.
ОУК в СУУ являются в первую очередь стрелки и светофоры.
Число ОУК и ОК в реальной системе управления может быть достаточно большим. Однако, с целью упрощения анализа приведенной общей структурной схемы, число ОУК ограничено двумя, а число ОК - одним.
Состояние ОК (ОУК), характеризуется рядом контролируемых параметров Х1 – Х3 (см. рис. 2.1). Для выключателя, такими параметрами являются надежное соприкосновение его контактов друг с другом, недопустимость их пригорания.
Изменение контролируемых параметров ОУ в заданном направлении характеризует понятие «управления». Изменение контролируемых параметров осуществляется формированием управляющих воздействий на объект Y1 – Y3. Управляющие воздействия на выключатели и разъединители заключаются в перемещении контактов аппаратов в требуемое положение.
Важной особенностью СУУ является то, что большинство контролируемых параметров является дискретными, и более того – бинарными. Бинарность параметра означает, что он может принимать только два состояния.
Информация о параметрах ОУК и ОК, представленная набором контролируемых параметров Х1 – Х3, фиксируется набором датчиков Д11 – Д33. Датчики осуществляют первичное преобразование контролируемых параметров в эквивалентные значения некоторой электрической величины а1 – а3. Как правило, в СУУ в качестве датчиков используют контакты исполнительных реле, либо конечные выключатели.
Далее, набор сигналов, характеризующих контролируемые параметры, поступает на входы вторичных преобразователей ВП11 – ВП33. Назначение вторичных преобразователей многогранно - это усиление, формирование сигналов (придание заданной формы), гальваническая развязка с объектом управления. Например, применение контактов реле в качестве датчиков в цифровых микропроцессорных схемах, а в частности в СУУ, напрямую без вторичного преобразования невозможно. «Дребезг» контактов при замыкании и размыкании цепей (многократные замыкания и размыкания) приводят к сбоям в работе цифровых систем.
Двоичные сигналы, сформированные на выходах вторичных преобразователей ВП11 – ВП33 (b1 –b3), поступают на информационные входы устройства управления (УУ), реализующего всю логику работы СУУ. Важно заметить, что каждый информационный вход в УУ имеет свой уникальный адрес (1а – 9а). Поэтому УУ всегда может определить какой параметр и от какого ОК поступает на соответствующий информационный вход. Помимо информационных входов УУ имеет также и информационные выходы. На эти выходы УУ подает сигналы, характеризующие управляющие воздействия (с1 – с3). Информационные выходы, также как и информационные входы имеют уникальные адреса (1б -6б).
Фактически, работа УУ заключается в опросе информационных входов по требуемым в текущей ситуации управления адресам, алгоритмической обработке результатов опроса информационных входов и формировании на соответствующих информационных выходах управляющих сигналов.
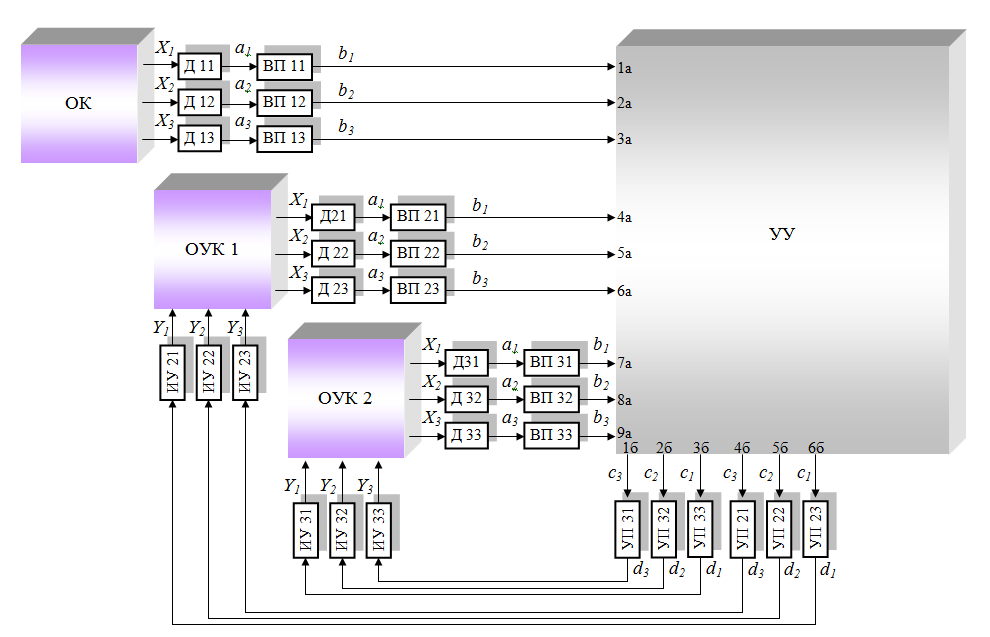
Рисунок 2.1 - Структурная схема системы управления
Управляющие воздействия (с1 – с3) непосредственно влиять на технологический процесс, как правило, не могут. Для того, чтобы оказать требуемые воздействия на ОУ, сигналы (с1 – с3) необходимо усилить. Также необходимо обеспечить гальваническую развязку УУ от ОУ по цепям управления. Указанные задачи выполняют усилители – преобразователи УП11 – УП23, формирующие из сигналов (с1 – с3) функционально взаимосвязанные с ними сигналы d1 – d3. Далее, уже сигналы d1 – d3 поступают в исполнительные устройства (ИУ11 – ИУ33).