ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 24
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

м ГИМ. С выходным валом исполнительного механизма жестко связан сердечник дифференциально трансформаторного преобразователя, выход которого присоединен к одному из выходов регулятора.
Основное достоинство П-регулятора - быстродействие. Его применяют для регулирования объектов без самовыравнивания и в тех случаях, когда в объектах наблюдаются частые отклонения нагрузки. Недостаток П-регулятора -остаточное отклонение регулируемого параметра.
Рисунок 45 - Регулятор давления прямого действия
 Интегральный регулятор (И-регулятор). В промышленных регуляторах И-закон регулирования получают в том случае, когда структурная схема регулятора составлена из последовательно включенных усилительного и интегрирующего звеньев (рисунок 46б).
Интегральный регулятор (И-регулятор). В промышленных регуляторах И-закон регулирования получают в том случае, когда структурная схема регулятора составлена из последовательно включенных усилительного и интегрирующего звеньев (рисунок 46б).
Интегрирующим звеном обычно служит гидравлический или электродвигательный исполни
тельный механизм.
121
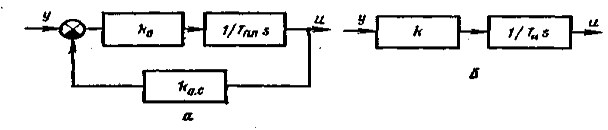
Рисунок 46 - Структурные схемы: а - П-регулятора; б - И-регулятора
 В качестве примера И-регулятора можно представить регулятор «Кристалл» с гидравлическим исполнительным механизмом ГИМ, если не будет обратной связи. При отклонении регулируемого параметра у от заданного значения открывается электромагнитный клапан исполнительного механизма ГИМ и вода под давлением перемещает поршень, поворачивая выходной вал регулирующего органа до тех пор, пока отклонение регулируемого параметра от заданного значения не уменьшится до нуля. Когда отклонение равно нулю, электромагнитный клапан ГИМ закрывается и поршень (и, следовательно, вал привода) останавливается в этом положении. Скорость перемещения затвора регулирующего органа зависит о
В качестве примера И-регулятора можно представить регулятор «Кристалл» с гидравлическим исполнительным механизмом ГИМ, если не будет обратной связи. При отклонении регулируемого параметра у от заданного значения открывается электромагнитный клапан исполнительного механизма ГИМ и вода под давлением перемещает поршень, поворачивая выходной вал регулирующего органа до тех пор, пока отклонение регулируемого параметра от заданного значения не уменьшится до нуля. Когда отклонение равно нулю, электромагнитный клапан ГИМ закрывается и поршень (и, следовательно, вал привода) останавливается в этом положении. Скорость перемещения затвора регулирующего органа зависит о
т значения Ти.Чем больше Титем меньше скорость перемещения регулирующего органа. Если скорость перемещения велика, то даже при незначительном отклонении регулируемого параметра от заданного значения затвор успеет пройти из одного крайнего положения в другое и действие И-регулятора будет аналогично действию релейного регулятора.
Положительная особенность И-регуляторов заключается в том, что в установившемся режиме значение регулируемого параметра остается постоянным независимо от изменения нагрузки объекта, то есть И-регуляторы являются астатическими. Они допускают значительное изменение нагрузки.
Недостаток И-регуляторов - большое время регулирования, поэтому они неприменимы на объектах без самовыравнивания.
Пропорционально-интегральные регуляторы (ПИ-регляторы). В промышленных регуляторах ПИ-закон регулирования достигается введением гибкой обратной связи, охватывающей исполнительный механизм и усилитель регулятора (рисунок 47а).
В цепь обратной связи включается реальное дифференцирующее звено (состоящее из дифференцирующего звена и апериодического звена, соединенных последовательно).
Механизм гибкой обратной связи называется изодромом, а сам регулятор - изодромным.
122
 Рисунок 47 - ПИ-регулятор: а - структурная схема; б - схематическое изображение
Рисунок 47 - ПИ-регулятор: а - структурная схема; б - схематическое изображение
 ПИ-регуляторы, как правило, непрямого действия. Схема гидравлического ПИ-регулятора показана на рисунке 47а.Механизм обратной связи, или изодрома, состоит из заполненного маслом цилиндра 6,поршня 7 и пружины 5. Полости цилиндра сообщаются через регулиру
ПИ-регуляторы, как правило, непрямого действия. Схема гидравлического ПИ-регулятора показана на рисунке 47а.Механизм обратной связи, или изодрома, состоит из заполненного маслом цилиндра 6,поршня 7 и пружины 5. Полости цилиндра сообщаются через регулиру
емый дроссель 8.Поэтому скорость перемещения поршня 7 зависит от степени открытия дросселя 8.Регулятор регулирует давление р1 путем изменения степени открытия клапана 11: если давление р1увеличивается, то клапан открывается и давление уменьшается. При увеличении давления р1мембрана 1 прогибается, преодолевая сопротивление пружины 2, и точка Аштока 3 перемещается в А'. Точка Втакже перемещается в точку В'и перемещает золотниковый механизм гидропривода вверх, открывая доступ жидкости в верхнюю часть цилиндра 9. Поршень 10 перемещается вниз и открывает затвор 11.В это время регулятор работает как П-регулятор. Так как масло в цилиндре 6 не успевает быстро протекать через небольшое отверстие дросселя 8, то вместе с поршнем 7 перемещ
Основное достоинство П-регулятора - быстродействие. Его применяют для регулирования объектов без самовыравнивания и в тех случаях, когда в объектах наблюдаются частые отклонения нагрузки. Недостаток П-регулятора -остаточное отклонение регулируемого параметра.
Рисунок 45 - Регулятор давления прямого действия
Интегральный регулятор (И-регулятор). В промышленных регуляторах И-закон регулирования получают в том случае, когда структурная схема регулятора составлена из последовательно включенных усилительного и интегрирующего звеньев (рисунок 46б).Интегрирующим звеном обычно служит гидравлический или электродвигательный исполни
тельный механизм.
121
Рисунок 46 - Структурные схемы: а - П-регулятора; б - И-регулятора
В качестве примера И-регулятора можно представить регулятор «Кристалл» с гидравлическим исполнительным механизмом ГИМ, если не будет обратной связи. При отклонении регулируемого параметра у от заданного значения открывается электромагнитный клапан исполнительного механизма ГИМ и вода под давлением перемещает поршень, поворачивая выходной вал регулирующего органа до тех пор, пока отклонение регулируемого параметра от заданного значения не уменьшится до нуля. Когда отклонение равно нулю, электромагнитный клапан ГИМ закрывается и поршень (и, следовательно, вал привода) останавливается в этом положении. Скорость перемещения затвора регулирующего органа зависит о
т значения Ти.Чем больше Титем меньше скорость перемещения регулирующего органа. Если скорость перемещения велика, то даже при незначительном отклонении регулируемого параметра от заданного значения затвор успеет пройти из одного крайнего положения в другое и действие И-регулятора будет аналогично действию релейного регулятора.
Положительная особенность И-регуляторов заключается в том, что в установившемся режиме значение регулируемого параметра остается постоянным независимо от изменения нагрузки объекта, то есть И-регуляторы являются астатическими. Они допускают значительное изменение нагрузки.
Недостаток И-регуляторов - большое время регулирования, поэтому они неприменимы на объектах без самовыравнивания.
Пропорционально-интегральные регуляторы (ПИ-регляторы). В промышленных регуляторах ПИ-закон регулирования достигается введением гибкой обратной связи, охватывающей исполнительный механизм и усилитель регулятора (рисунок 47а).
В цепь обратной связи включается реальное дифференцирующее звено (состоящее из дифференцирующего звена и апериодического звена, соединенных последовательно).
Механизм гибкой обратной связи называется изодромом, а сам регулятор - изодромным.
122
Рисунок 47 - ПИ-регулятор: а - структурная схема; б - схематическое изображение ПИ-регуляторы, как правило, непрямого действия. Схема гидравлического ПИ-регулятора показана на рисунке 47а.Механизм обратной связи, или изодрома, состоит из заполненного маслом цилиндра 6,поршня 7 и пружины 5. Полости цилиндра сообщаются через регулиру
емый дроссель 8.Поэтому скорость перемещения поршня 7 зависит от степени открытия дросселя 8.Регулятор регулирует давление р1 путем изменения степени открытия клапана 11: если давление р1увеличивается, то клапан открывается и давление уменьшается. При увеличении давления р1мембрана 1 прогибается, преодолевая сопротивление пружины 2, и точка Аштока 3 перемещается в А'. Точка Втакже перемещается в точку В'и перемещает золотниковый механизм гидропривода вверх, открывая доступ жидкости в верхнюю часть цилиндра 9. Поршень 10 перемещается вниз и открывает затвор 11.В это время регулятор работает как П-регулятор. Так как масло в цилиндре 6 не успевает быстро протекать через небольшое отверстие дросселя 8, то вместе с поршнем 7 перемещ

