Файл: Филиал федерального государственного бюджетного образовательного учреждения высшего образования Югорский государственный университет.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.02.2024
Просмотров: 122
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Задание 3. Назначение, устройство, принцип работы и основные элементы конструкции токоограничивающих реакторов.
Токоограниичивающий реактор - электрический аппарат, предназначенный для ограничения ударного тока короткого замыкания. Включается последовательно в цепь, ток которой нужно ограничивать и работает как индуктивное (реактивное) дополнительное сопротивление, уменьшающее ток и поддерживающее напряжение в сети при коротком замыкании, что увеличивает устойчивость генераторов и системы в целом.
Реактор - это катушка с постоянным индуктивным сопротивлением, включенная в цепь последовательно. В большинстве конструкций токоограничивающие реакторы не имеют ферромагнитных сердечников. В нормальном режиме на реакторе наблюдается падение напряжения порядка 3—4 %, что вполне допустимо. В случае короткого замыкания бо́льшая часть напряжения приходится на реактор. Соответственно, чем выше будет реактивное сопротивление, тем меньше будет значение максимального ударного тока в сети.
Реактивность прямо пропорциональна индуктивному сопротивлению катушки. При больших токах у катушек со стальными сердечниками происходит насыщение сердечника, что резко снижает реактивность, и, как следствие, реактор теряет свои токоограничивающие свойства. По этой причине реакторы выполняют без стальных сердечников, несмотря на то, что при этом, для поддержания такого же значения индуктивности, их приходится делать больших размеров и массы. В случае если в линии электропередач 0,4…110 кВ имеются устройства передачи данных по технологии PLC, то реактор будет гасить эти частоты.
Токоограничивающие реакторы подразделяются:
-
по месту установки: наружного применения и внутреннего; -
по напряжению: среднего (3…35 кВ) и высокого (110…500 кВ); -
по конструктивному исполнению: на бетонные, сухие, масляные и броневые; -
по расположению фаз: вертикальное, горизонтальное и ступенчатое; -
по исполнению обмоток: одинарные и сдвоенные; -
по функциональному назначению: фидерные, фидерные групповые и межсекционные.
Задание 4. Решение
1) Напряженность магнитного поля, созданная током катушки, для однородной магнитной цепи

где l - длина средней линии кольцевого сердечника.

2) По кривой намагничивания электротехнической стали определяем
В=1,7 Тл
3) Магнитный поток в сердечнике
Ф = В· S = 1,7 · 28,26 · 10-4 = 0,048Вб
где

Экзаменационный билет № 30
Задание 1. Пусковые свойства асинхронного двигателя.
Пуск асинхронных двигателей. Проблемы, возникающие при пуске асинхронных двигателей, близки к проблемам пуска двигателей постоянного тока. Общим является факт протекания большого пускового тока, что опасно в отношении перегрева обмоток статора и ротора. При пуске также снижается напряжение сети, отрицательно влияющее на работу других потребителей. Существует несколько способов пуска асинхронных двигателей.
Для двигателей с фазным ротором применяется реостатный пуск, для двигателей с короткозамкнутым ротором - прямой пуск от сети, пуск от пониженногонапряжения - при помощи реактора или автотрансформатора, включенного в цепь статора, пуск с плавным подъемом частоты (и напряжения).
Пуск асинхронного двигателя с фазным ротором с помощью реостата в цепи ротора аналогичен реостатному пуску двигателя постоянного тока. При этом уменьшается пусковой ток и увеличивается пусковой момент (до определенного предела увеличения сопротивления в цепи ротора). Физически это объясняется тем, что хотя при введении активного сопротивления ток ротора уменьшается, активная составляющая тока и, следовательно, момент в соответствии с формулой
М = СФI2cos φ2
увеличивается. Для уменьшения числа ступеней пускового реостата в цепь ротора асинхронного двигателя включают дроссель, шунтированный активным сопротивлением (рис. 1, а).
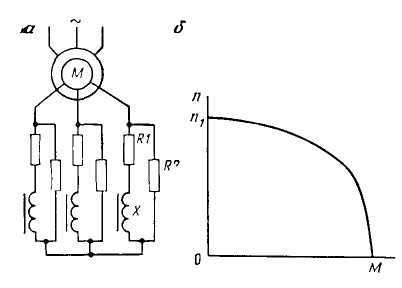
Рисунок 1 – Пуск АД с активно-индуктивным контуром в цепи ротора
Асинхронные двигатели с короткозамкнутым ротором проще по устройству и обслуживанию, а также дешевле и надежнее в работе, чем двигатели с фазным ротором. Поэтому везде, где это возможно, применяют короткозамкнутые двигатели.
Прямой пуск, при котором обмотка статора двигателя подключается на номинальное напряжение сети, широко применяется в нефтяной промышленности. Современные асинхронные короткозамкнутые двигатели по возникающим при пуске электродинамическим усилиям и условиям нагрева допускают прямой пуск. Поэтому такой способ пуска всегда возможен, если сеть достаточно мощная и пусковые токи не вызывают недопустимо больших потерь напряжения в сети (не более 10%).
Пусковые свойства асинхронных короткозамкнутых двигателей можно характеризовать коэффициентом качества пуска, который представляет собой отношение кратности пускового момента к кратности пускового тока, т. е.
γ = (Мп/Мн)/ (Iп / Iн)
Для двигателей обычного исполнения γ = 0,15…0,25. Для увеличения γ асинхронные короткозамкнутые двигатели изготовляют с глубоким и узким пазом или с двойной беличьей клеткой. Для глубокопазных двигателей γ = 0,27… 0,33, а для двигателей с двойной беличьей клеткой γ = 0,36-0,5. Однако к. п. д. и коэффициент мощности этих двигателей ниже двигателей обычного исполнения.
Если прямой пуск от сети короткозамкнутого двигателя невозможен, то применяют один из способов пуска при пониженном напряжении (через автотрансформатор или реактор). Сначала двигатель разгоняется при пониженном напряжении, а затем после достижения установившейся частоты вращения подается полное напряжение.
Пуск двигателя плавным подъемом частоты и напряжения применяется в том случае, когда асинхронный двигатель питается от управляемого источника переменного тока (тиристорного преобразователя частоты). При таком пуске по мере разгона двигателя увеличивают частоту тока, а напряжение увеличивают таким образом, чтобы пусковой ток оставался все время неизменным. Подобный способ пуска находит применение для погружных электродвигателей центробежных насосов.
Задание 2. Назначение, устройство и принцип действия асинхронной машины специального назначения.
Индукционный регулятор напряжения (ИР), используемый для регулирования напряжения. Ротор машины должен быть снабжен механическим поворотным устройством.
С
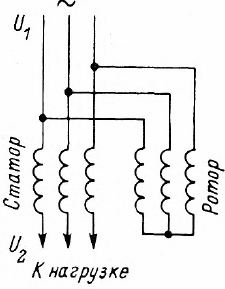 хема индукционного регулятора представлена на рисунке. Ротор, а также выводы начала обмотки статора подключены к сети, а к выводам конца обмотки статора присоединяется нагрузка.
хема индукционного регулятора представлена на рисунке. Ротор, а также выводы начала обмотки статора подключены к сети, а к выводам конца обмотки статора присоединяется нагрузка. Токи ротора создают вращающееся магнитное поле, которое индуцирует в обмотках статора дополнительные ЭДС E2, значение и фаза которых зависит от угла поворота ротора α. В итоге при равенстве числа витков в обмотках напряжение на выходе U2 можно регулировать от нуля (при α = 180°) до двойного напряжения сети (при α = 0).
Недостаток рассмотренного простейшего регулятора - изменение фазы выходного напряжения. Поэтому иногда используют сдвоенный индукционный регулятор, состоящий как бы из двух машин, обмотки статоров которых включены последовательно.
Асинхронный преобразователь частоты. Как известно, частота тока в роторе асинхронной машины зависит от скольжения (f2 = sf1). Это свойство асинхронных машин пользуется в асинхронных преобразователях частоты (АПЧ).
Обмотку статора АПЧ подключают к трехфазной сети с частотой f1, а ротор приводят во вращение приводным двигателем (ПД) в направлении против вращения поля статора. В этом случае в обмотке ротора наводится ЭДС Е2 частотой f2 >f1, так как скольжение s >1. Указанная ЭДС через контактные кольца и щетки создает на выходе АПЧ напряжение. Если требуется получить на выходе АПЧ напряжение частотой f2 < f1, то ротор вращают в направлении вращения поля статора с частотой вращения n2 < n1(при этом s <1).
Мощность на выходе АПЧ складывается из электромагнитной мощности Рэм, передаваемой в обмотку ротора вращающимся полем статора, и механической мощности приводного двигателя Рпд, т. е. Р2 = Рэм + Рпд. Соотношение между мощностями Рэм и Рпд зависит oт скольжения. Так, при работе АПЧ со скольжением s = 2 эти мощности равны и ротор половину мощности получает от статора, а половину - от приводного двигателя. При необходимости плавной регулировки частоты на выходе АПЧ в качестве приводного двигателя применяют электродвигатель с плавной регулировкой частоты вращения, например двигатель постоянного тока.
Электрические машины синхронной связи. В современной технике часто возникает необходимость в синхронизации вращения или поворота осей механизмов. Эта задача успешно решается с помощью системы синхронной связи.
Синхронной связью называют электрическую связь, которая обеспечивает одновременное вращение или одновременный поворот двух (или более) находящихся на расстоянии друг от друга и механически не связанных валов. Распространены два вида систем синхронной связи: система «электрического вала» (синхронного вращения) и система «передачи угла» (синхронного поворота).
Системы электрического вала применяют для синхронного (одновременного) вращения нескольких механизмов, имеющих значительные нагрузочные моменты на валу. Для привода таких механизмов применяют обычные асинхронные двигатели с фазным ротором. При этом обмотки роторов
электрически соединяй и друг с другом, а обмотки статоров включают в общую сеть трех фазного тока.
Системы передачи угла (синхронного поворота) применяют для дистанционного управления или контроля положения в пространстве каких-либо устройств. Обычно такая система выполняется на небольших асинхронных машинах (однофазных или трехфазных), называемых сельсинами.
Наибольшее применение получили однофазные сельсины. Такой сельсин имеет однофазную обмотку возбуждения и трехфазную обмотку синхронизации, соединенную звездой. Одна из обмоток располагается на роторе, а другая - на статоре.
По конструкции сельсины разделяют на контактные, у которых обмотка на роторе соединена с внешней цепью через контактные кольца и щетки, и бесконтактные, не имеющие на роторе oбмоток.
Асинхронные исполнительные двигатели. Асинхронные исполнительные двигатели используют в системах автоматического управления для управления и регулирования различных устройств.
Асинхронные исполнительные двигатели начинают действовать при подаче им электрического сигнала, который они преобразуют в заданный угол поворота вала или в его вращение. Снятие сигнала приводит к немедленному переходу ротора исполнительного двигателя в неподвижное состояние без использования каких-либо тормозных устройств. Работа таких двигателей протекает все время в условиях переходных режимов, в результате чего скорость ротора зачастую при кратковременном сигнале не достигает установившегося значения. Этому способствуют также частые пуски, изменения направления вращения и остановки.
По конструктивному оформлению исполнительные двигатели представляют собой асинхронные машины с двухфазной обмоткой статора, выполненной так, что магнитные оси ее двух фаз сдвинуты в пространстве относительно друг друга не угол 90 эл. град.
Одна из фаз обмотки статора является обмоткой возбуждении и имеет выводы к зажимам с обозначение ми C1 и С2. Другая, выполняющая роль обмотки управления, имеет выводы, присоединенные к зажимам с обозначениями У1 и У2.
К обеим фазам обмотки статора подводят соответствующие переменные напряжения одинаковой частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с неизменным напряжением U, а в цепь обмотки управления подают сигнал в виде напряжения управления U

