Файл: Типы ориентирований в лазерном 3Д сканировании и их описание.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.03.2024
Просмотров: 24
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Типы ориентирований в лазерном 3Д сканировании и их описание
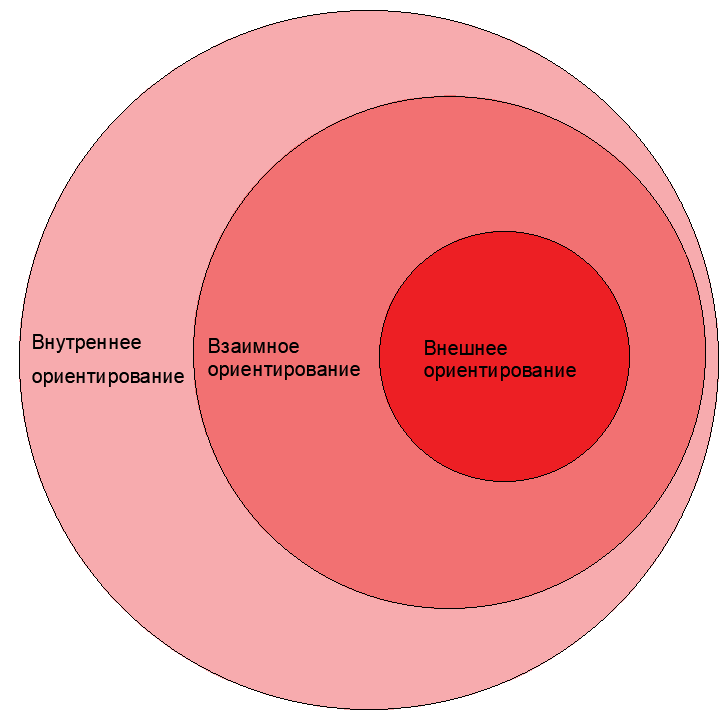
В технологии лазерного 3Д сканирования все полученные погрешности можно распределить на 3 группы:
-
Погрешности внутреннего ориентирования -
Погрешности взаимного ориентирования -
Погрешности внешнего ориентирования
Внутреннее ориентирование
Погрешности внутреннего ориентирования постоянны и неизбежны, они несут в себе ошибки, определяемые техническими характеристиками прибора.
Одной из задач оператора лазерного сканера является сведение этой ошибки к минимально возможному значению путем выбора наиболее подходящей точки стояния сканера, освещения обследуемого объекта и, при необходимости применения специальных средств, наносящихся на поверхность обследуемого объекта.
Взаимное ориентирование
Погрешности взаимного ориентирования представляют собой невязку координат одних и тех же опорных точек с разных точек стояния прибора. Это может быть вызвано ошибками внутреннего ориентирования сканера, внешними факторами, сдвигом опорных точек в промежутке между двух съемок с разных точек стояния или ошибкой выбора опорных точек в процессе камеральной обработки.
Ошибки взаимного ориентирования возможны только при условии nст>1. Если nст=1, то ошибка взаимного ориентирования исключена.
Для сведения погрешности к минимальному значению необходимо выбрать подходящие опорные точки и правильно сориентировать прибор (по углу и расстоянию) по отношению к ним. Правильными опорными точками будут являться автоматически определяемые таргеты прибора, закрепленные в пространстве неподвижно и располагаться в виде треугольника как в плановом положении, так и по высоте.
Внешнее ориентирование
Погрешностью внешнего ориентирования возникает при привязке локальной системой координат, созданной прибором к внешней системе координат. Соответственно, ошибки, возникающие при внешнем ориентировании, могут быть вызваны ошибкой определения координат исходных пунктов. Помимо этого, сама привязка к исходному пункту так же будет включать в себя ошибку взаимного ориентирования, а, соответственно, включается и ошибка внутреннего ориентирования. Для сведения к минимуму ошибки внешнего ориентирования необходимо привязываться только к пунктам с достоверными координатами, а так же минимализировать ошибки всех других ориентирований.
Вывод
Таким образом, чем больше ориентирований необходимо произвести, тем большая ошибка будет накапливаться. Ошибка внутреннего ориентирования является неизбежной и присутствует в любых видах работы с прибором. При необходимости взаимного ориентирования облаков точек, сохраняется ошибка внутреннего ориентирования, а так же накладываются факторы, дополнительно добавляющие невязку. Ошибка же внешнего ориентирования включает в себя все вышеперечисленное и добавляет ошибку определения координат исходных пунктов.
Точность обследования архитектурного элемента методом 3Д лазерного сканирования
В экспериментальных целях было проведено обследование лепного кронштейна для получения практических данных и последующего сравнения их с данными, полученными методом фотограмметрии.
Обследование проводилось с настройками плотности облака точек 0.6мм/10м.
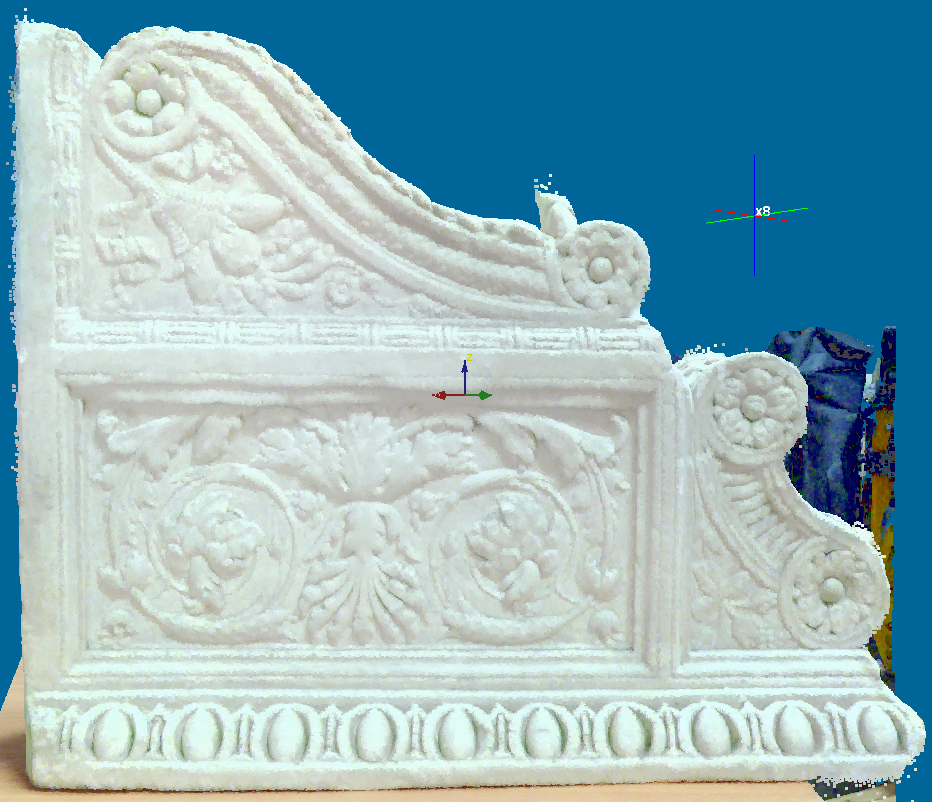
Рисунок 1 – Первое единичное облако точек плотностью 0.6мм/10м


Рисунок 3 - Второе единичное облако точек плотностью 0.6мм/10м
Рисунок 2 - настенные марки
Д
 ля оценки ошибки взаимного ориентирования съемка была проведена с двух точек стояний, облака которых в последующем были уравнены в единое при помощи распечатанных настенных марок (опорных точек).
ля оценки ошибки взаимного ориентирования съемка была проведена с двух точек стояний, облака которых в последующем были уравнены в единое при помощи распечатанных настенных марок (опорных точек).
Марки определялись в програмном продукте Z+F LaserControl при помощи инструмента «Fit target». Таким образом, после определения каждой марки с каждой точки стояния, можно связать облака точек в единое инструментом «Register with targets». В итоге получаем среднюю, медианную и максимаьную невязку опорных точек.

Рисунок 4 - результаты уравнивания облаков точек
К
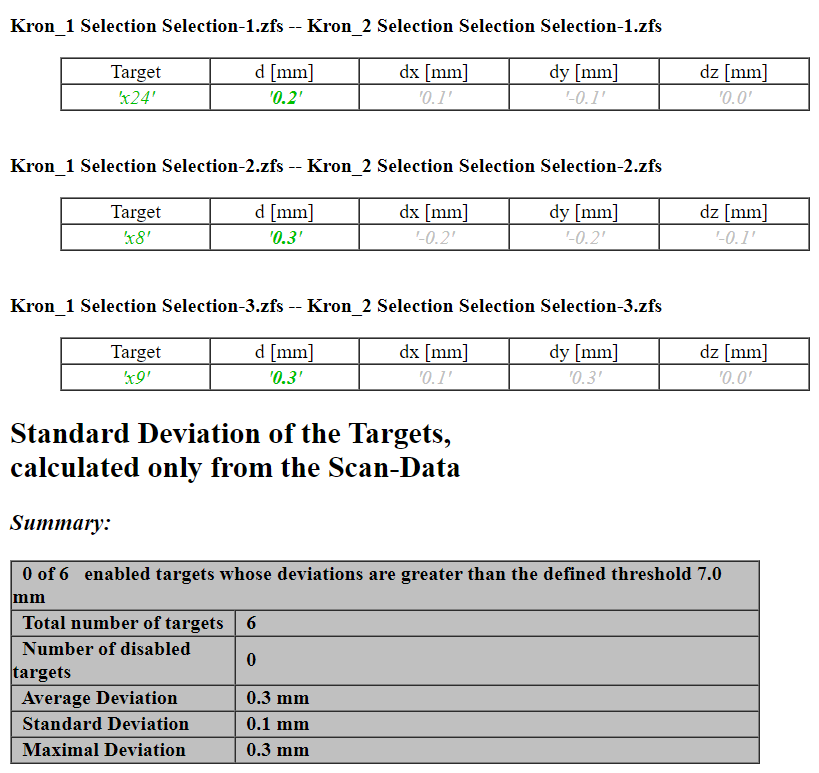

оличество использованных таргетов – 6
Средняя ошибка – 0,3 мм
Медианная ошибка – 0,1 мм
Максимальная ошибка – 0,3 мм