Файл: Разработка системы управления скоростью электропривода постоянного тока.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 18.10.2024
Просмотров: 9
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ОБРАЗОВАНИЯ
«МАГНИТОГОРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИМ. Г.И. НОСОВА»
Кафедра автоматизированного электропривода и мехатроники
КУРСОВОЙ ПРОЕКТ
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
По дисциплине: Системы управления электроприводов
На тему: Разработка системы управления скоростью электропривода постоянного тока
Исполнитель:, Халецкий Н.В. студент 4 курса, группа Аэп-17-1
Руководитель: Омельченко Евгений Яковлевич
Работа допущена к защите: г.
(подпись)
Работа защищена: г.
(оценка) (подпись)
Магнитогорск 2020
ВВЕДЕНИЕ
Одной из основных задач при внедрении электропривода в конкретное производство является разработка оптимальных по быстродействию систем управления.
Быстродействие электропривода характеризуется временем затухания переходных процессов, возникающих в нем при изменении управляющего воздействия. Быстродействие затухания указанных процессов определяется параметрами элементов, входящих в состав привода, и зависит от закона управления, заложенного в систему управления приводом.
Силовая часть электропривода при проектировании выбирается из условий, непосредственно не связанных с достижением того или иного быстродействия, а по этому её удобно считать заданной. При такой постановке вопроса параметры заданной силовой части и дополнительные условия (ограничения), присущие ей или связанному с ней механизму, однозначно определяют её предельное быстродействие и закон управления, обеспечивающий это быстродействие.
Таким образом, сокращение времени переходных процессов сводится к отыскиванию законов управления силовой частью, обеспечивающих её придельное быстродействие, и построению системы управления, осуществляющей найденный закон управления.
-
Объект регулирования
1.1 Технические данные электродвигателя Д812
Технические данные электродвигателя Д812 указаны в таблице 1
Таблица 1
| №п/п | Наименование | Обозначение | Ед. изм. | Величина |
| 1 | Номинальная мощность | Рн | кВт | 75 |
| 2 | Номинальное напряжение | Uн | В | 220 |
| 3 | Номинальный ток якоря | Iн | А | 380 |
| 4 | Номинальная скорость вращения | nн | Об/мин | 500 |
| 5 | Номинальный момент | Мн | Нм | 1371 |
| 6 | Сопротивление обмоток при 20оС - якоря - добавочных полюсов | rя rдп | Ом Ом | 0,0065 0,003 |
| 7 | Номинальное напряжение возбуждения | Uвн | В | 440 |
| 8 | Номинальный ток возбуждения | Iвн | А | 5,3 |
| 9 | Число главных полюсов | 2р | - | 4 |
| 10 | Перегрузочная способность |  | - | 2,5 |
-
Параметры силового оборудования
Исходя из параметров данного двигателя с учетом перегрузочной способности выбирается тиристорный преобразователь КТЭ-500/220 (440) со следующими параметрами:
Idн=200А;Udн=220B
Idм=1000 А;
Тиристорный преобразователь питается от сети 380 В черезтокоограничивающий реактор РТСТ-20,5-2,02со следующими параметрами:
Uл=410В;
Iфн=20,5 А;
Lт=2,02 мГн;
Rт= 233 мОм
1.3. Основные параметры объекта регулирования
Структурная схема объекта регулирования представлена на рис. 4
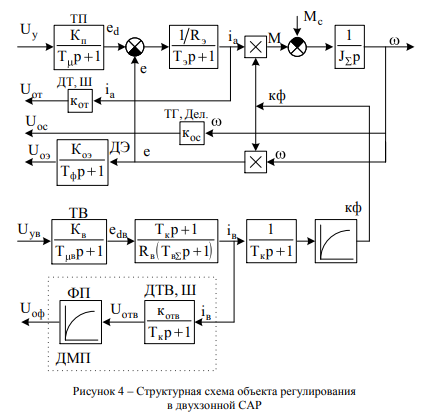

Активное сопротивление якорной цепи:

Активное сопротивление реактора:
Эквивалентное сопротивление силовой цепи:

Конструктивная постоянная двигателя:
C=kФн=(Uн-Iн*Ra)/wн=7.7947
Номинальная скорость двигателя:
ωн=53.38
Индуктивность обмотки якоря:
Индуктивность реактора:
Эквивалентная индуктивность:

Электромагнитная постоянная времени якорной цепи:
Электромагнитная постоянная времени силовой цепи:
Суммарный момент инерции:
Электромеханическая постоянная времени электропривода:
Коэффициент обратной связи по току:
Коэффициент обратной связи по ЭДС:
Коэффициент обратной связи по скорости:
Коэффициентрегуляторатока:
 Tm/(4*Tп)*(Kot*c)/(Koc*Rэ)=21.02
Tm/(4*Tп)*(Kot*c)/(Koc*Rэ)=21.02Коэффициент регулятора скорости:
Коэффициент обратной связи по току возбуждения:

Электромагнитная постоянная времени по току возбуждения:
Тов=Lв/Rв=1.2
Тф=0.005
Тк=0.12
Тп=0.0033
Kпв=75,36
-
Построение системы регулирования скорости
2.1. Построение контура регулирования тока
2.1.1. ПИ-регулятора тока
При построении контура регулирования тока имеют место следующие допущения: 1) параметры объекта стабильны и не зависят от температуры; 2) влияние внутренней обратной связи по ЭДС не учитывается; 3) не учитывается прерывистый режим работы преобразователя.
Структурная схема контура регулирования тока имеет вид, показанный на рис. 2
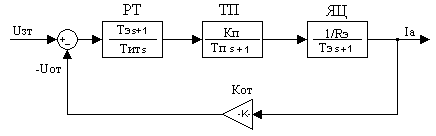
Рисунок 2 - Структурная схема контура регулирования тока
Общая формула оптимального регулятора i-го контура имеет вид
где i – номер контура регулирования;
WOi(s) – передаточная функция объекта регулирования i-го контура регулирования;
Kоi, Koi–1 – коэффициенты обратных связей i-го и i–1-го контура регулирования соответственно.
В соответствии с этой формулой и со структурной схемой на рис. передаточная функция регулятора тока имеет вид
 ,
,где
 с – постоянная времени интегрирования регулятора тока.
с – постоянная времени интегрирования регулятора тока. –коэффициент регулятора тока
–коэффициент регулятора тока2.1.2. Построение двойного регулятора тока
В системах ТП–Д при снижении тока ниже граничного и при реверсе тока имеет место режим прерывистых токов, когда существенно изменяются параметры силовой части и качественное управление приводом в этом режиме без дополнительных мер невозможно.
Существуют различные варианты повышения качества регулирования в прерывистых режимах, используемые в комплектных устройствах.
В ЭКТ используется двойной регулятор тока. Задача первого контура (непрерывный режим) – иметь передаточную функцию инерционного звена с предельно возможным быстродействием. Второй регулятор тока делает замкнутый контур тока оптимальным с предельным быстродействием.
При построении двойного регулятора тока из-за малости Тμ тиристорный преобразователь считается безынерционным.
Структурная схема двойного регулятора тока представлена на рис. 3.
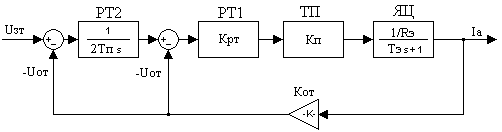
Рисунок 3 - Структурная схема двойного регулятора тока (
 )
)Коэффициент усиления первого регулятора тока РТ1
.
Внутренний контур регулирования тока (РТ1) обеспечивает передаточную функцию фильтра с максимальным быстродействием (с минимальной постоянной времени
 ). Внешний регулятор тока (РТ2) обеспечивает настройку на модульный оптимум (получение оптимального переходного процесса в контуре тока).
). Внешний регулятор тока (РТ2) обеспечивает настройку на модульный оптимум (получение оптимального переходного процесса в контуре тока).Передаточная функция второго оптимального регулятора тока РТ2
 .
.При вхождении в зону прерывистого режима обратная связь по току на РТ1 практически отключается, так как РТ1 – пропорциональный. Переходные процессы по току заканчиваются на интервале проводимости и первый контур практически разомкнут.
-
Построение контура регулирования скорости (ЭДС)
2.2.1.Задатчик интенсивности скорости
Во всех электроприводах, рассматриваемых в курсовом проекте, задание на скорость формируется задатчиком интенсивности скорости, который формирует заданное ускорение и замедление электропривода. При заданном ускорении электропривода и выбранном уровне релейного элемента U0, постоянная времени ЗИ определяется соотношением
2.2.2. Пропорциональный регулятор ЭДС
В СУЭП скорости с отрицательной обратной связи по ЭДС двигателя при определении передаточной функции регулятора ЭДС (РЭ) необходимо учитывать фильтр датчика ЭДС в цепи обратной связи, а на входа РЭ со стороны задания необходимо включить такой же фильтр, как и в цепи датчика ЭДС.
Таким образом, РЭ получился пропорциональным. На величину коэффициента передачи РЭ существенное влияние оказывает влияние постоянной времени фильтра Тф датчика ЭДС.
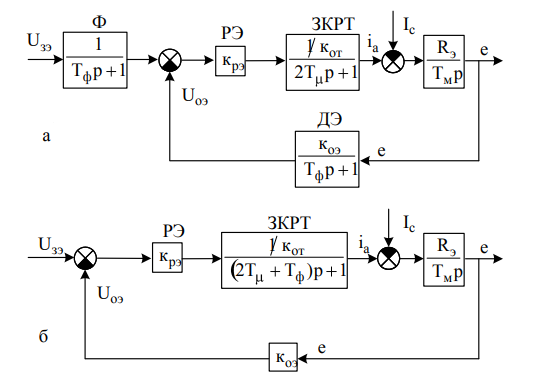
Рисунок 4 -СУЭП ЭДС (а – исходная схема, б – эквивалентно преобразованная)