Файл: Задача на выбор ответов 8 баллов 1 вопрос задача на решение 10 баллов.docx
Добавлен: 17.03.2024
Просмотров: 25
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
88. Механическое движение − это изменение положения одного тела относительно другого (тела отсчета), с которым связана система координат.
89. Алгебраическое значение касательного ускорения точки - это проекция вектора ускорения на касательную к траектории движения точки.
90. При естественном способе задания движения точки ее касательное ускорение определяется второй производной от дуговой координаты по времени.
91. Нормальное ускорение точки характеризует изменение ее скорости по направлению.
92. При поступательном движении твердого тела траектории, скорости и ускорения точек тела одинаковы.
93. Одной из основных задач кинематики точки является описание способов задания движения точки.
94. Одной из основных задач кинематики твердого тела является определение кинематических характеристик движения твердого тела.
95. Геометрическое место последовательных положений движущейся точки в рассматриваемой системе отсчета − это траектория точки.
96. При векторном способе задания движения точки ее положение определяется радиус-вектором, проведенным из неподвижной точки, связанной с телом отсчета.
97. Алгебраическая скорость − проекция вектора скорости на касательную, равная производной от дуговой координаты по времени.
98. Кинематическая мера изменения скорости - ускорение точки.
99. Естественные оси (касательная, главная нормаль, бинормаль) − это оси подвижной прямоугольной системы координат с началом в движущейся точке. Их положение определяется траекторией движения.
100. Система координат, в которой рассматривается движение точки, и тело отсчета называются системой отсчета.
101. При координатном способе задания движения задаются координаты точки как функции времени.
102. Вектор, направленный по оси вращения в ту сторону, откуда вращение видно происходящим против хода часовой стрелки, с модулем, равным модулю алгебраической угловой скорости – это вектор угловой скорости.
103. Движение точки (или тела) по отношению к подвижной системе отсчета - относительное движение.
104.
v⃗ =v⃗r+v⃗ e - теорема сложения скоростей
a⃗ =a⃗ r+a⃗ e+a⃗ c, a⃗ c=2ω⃗ e×v⃗ r – Теорема Кориолиса
104. Теорема о сложении скоростей: При сложном движении точки абсолютная скорость равна сумме ее относительной и переносной скоростей.
105. Переносное ускорение точки − это ускорение того места подвижной системы координат, с которым в данный момент совпадает движущаяся точка.
106. Угловая скорость тела при его плоском движении, скорость его произвольной точки A и расстояние от этой точки до мгновенного центра скоростей P связаны соотношением:
ω=vAAP
Да
107. Способы вычисления ускорения Кориолиса:
1. По правилу вычисления векторного произведения.
2. По правилу Жуковского.
108. Движение, при котором все точки тела движутся в плоскостях, параллельных некоторой неподвижной плоскости – это плоское (или плоско-параллельное) движение твердого тела.
109. Скорость того места подвижной системы координат, с которым в данный момент совпадает движущаяся точка - это переносная скорость.
110. Движение подвижной системы отсчета относительно основной - переносное движение.
112. Движение плоской фигуры можно рассматривать как сложное, которое складывается из относительного и переносного. Поступательное движение подвижной системы координат вместе с произвольной точкой, жестко связанной с фигурой, называемой полюсом – это переносное движение.
113. Зависит ли закон изменения угла от выбора полюса?
Не зависит
114. Зависит ли угловая скорость твердого тела, совершающего плоское движение, от выбора полюса?
Не зависти
115. Правило Жуковского: Для определения направления ускорения Кориолиса надо вектор относительной скорости спроецировать на плоскость, перпендикулярную оси вращения в переносном движении, и повернуть в сторону вращения на угол 90 град.
116. Модуль ускорения Кориолиса:
ac=2∣ω⃗ e∣∣v⃗ r∣sinα
Верно
117. Скорость любой точки плоской фигуры находится как скорость во вращательном движении вокруг мгновенного центра скоростей.
118. Абсолютное ускорение точки − это ускорение точки в основной системе отсчета.
119. Движение точки (или тела) по отношению к основной системе отсчета - абсолютное движение.
120. Эти уравнения определяют движение плоской фигуры:
xA=xA(t),
yA=yA(t),
φ=φ(t)
Да
121. Теорема Кориолиса: При непоступательном переносном движении абсолютное ускорение точки находится как сумма трех ускорений: относительного, переносного и ускорения Кориолиса.
122. Движение плоской фигуры можно рассматривать как сложное, которое складывается из относительного и переносного. Вращение плоской фигуры вокруг выбранного полюса - это плоское движение.
123. Абсолютная скорость точки − это скорость точки в основной системе отсчета.
124. Относительное ускорение точки - это ускорение точки в подвижной системе отсчета.
125. Движение точки (или тела), которое рассматривается одновременно в разных системах отсчета, - это сложное движение.

126. Теорема. Скорость любой точки тела при плоском движении находится как сумма скорости полюса и скорости данной точки во вращательном движении вокруг полюса.
127.
v⃗ ,a⃗ - Кинематические характеристики абсолютного движения
v⃗ e,a⃗ e - Кинематические характеристики переносного движения
v⃗ r,a⃗ r - Кинематические характеристики относительного движения
128. При задании плоского движения за полюс может приниматься любая точка тела.
129. Относительная скорость точки - это скорость точки в подвижной системе отсчета.
130. Ускорение Кориолиса учитывает изменение относительной скорости, вызванное переносным движением, и изменение переносной скорости, вызванное относительным движением.
131. Теорема. При непоступательном движении плоской фигуры существует жестко связанная с ней точка, скорость которой в данный момент движения равна нулю. Эта точка является мгновенным центром скоростей.
132. Кинетический момент вращающегося твердого тела относительно оси вращения равен произведению момента инерции твердого тела относительно оси и угловой скорости его вращения
133. Фермой называется жесткая (неизменяемая) стержневая конструкция. Элементами фермы являются соединенные шарнирно идеальные стержни. Шарниры соединений стержней это узлы фермы
134. Закон равенства действия и противодействия. Два тела действуют друг на друга с силами равными по величине и направленными в разные стороны
135. кинетическая энергия тела при вращательном движении равна половине произведения момента инерции тела относительно оси вращения на квадрат его угловой скорости.
136. При интегрировании дифференциальных уравнений движения материальной точки постоянные интегрирования находятся из начальных условий, которые определяют положение этой точки и ее скорость в начальный момент движения.
137. Сила, действующая на материальную точку, сообщает ей ускорение, которое пропорционально силе и направлено в сторону ее действия.
138. Отношение элементарной работы силы к элементарному промежутку времени ее совершения - мощность силы.
139. Элементарной работой силы называется скалярная мера действия силы, определяемая скалярным произведением вектора силы на элементарное перемещение точки ее приложения.
140. Принцип д’Аламбера для материальной точки: Если в фиксированный момент движения, кроме действующих на точку сил, добавить силу инерции, то система сил будет уравновешенной.
141. Материальная точка при действии на нее системы сил приобретает ускорение, равное сумме ускорений, возникающих от действия каждой силы в отдельности.
142. Метод решения задач динамики, основанный на применении принципа д'Аламбера, носит название метода кинетостатики.
143. Принцип д’Аламбера в общем случае записывается в виде шести скалярных равенств: три из которых, это равенства нулю сумм проекций всех действующих сил и сил инерции на каждую из координатных осей.
144. Для того, чтобы при вращении тела вокруг неподвижной оси не возникали динамические реакции, необходимо и достаточно, чтобы ось вращения была главной центральной осью инерции.
145. Реально сила инерции не приложена к материальной точке, а есть равнодействующая сил, с которыми данная точка действует на взаимодействующие с ней тела.
146. При движении несвободного твердого тела реакции связей, действующие на это тело, складываются из статических и добавочных динамических составляющих.
147. Механическая система – это совокупность взаимодействующих между собой материальных точек.
148. Силой инерции материальной точки называется сила, равная по модулю произведению массы точки на ее ускорение и направленная в сторону противоположную ускорению.
У
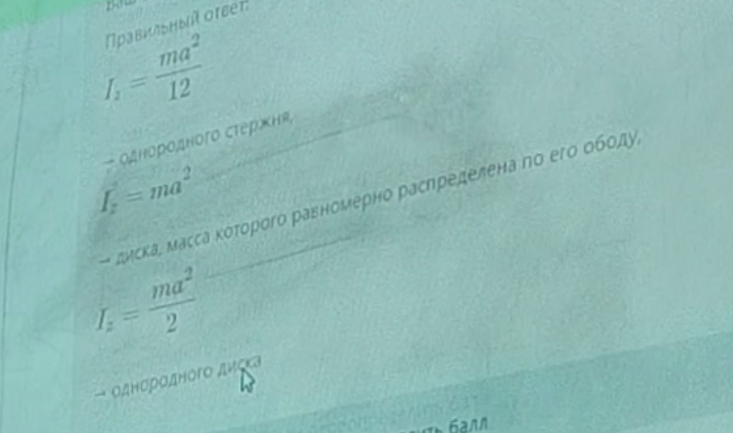 становите соответствие формул моментов инерции. Момент инерции для однородного стержня , диска масса которого , однородного диска
становите соответствие формул моментов инерции. Момент инерции для однородного стержня , диска масса которого , однородного дискаС
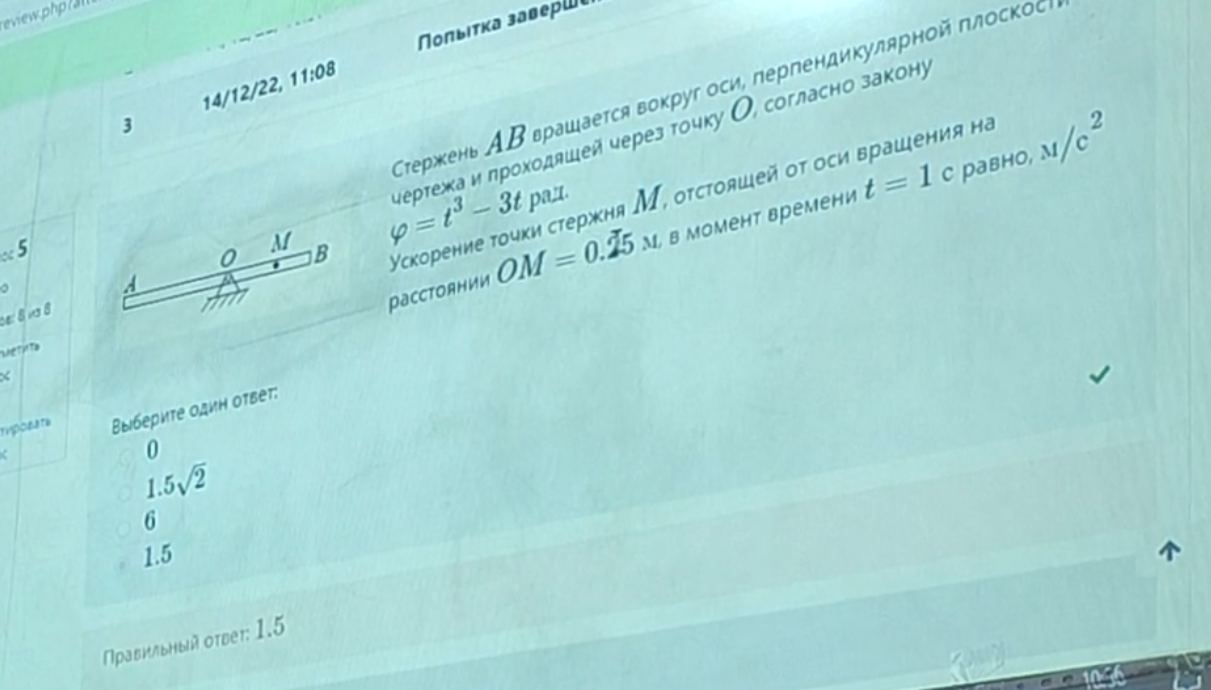 тержень AB вращается вокруг оси , перпендикулярной плоскости чертежа проходящей черещ точку
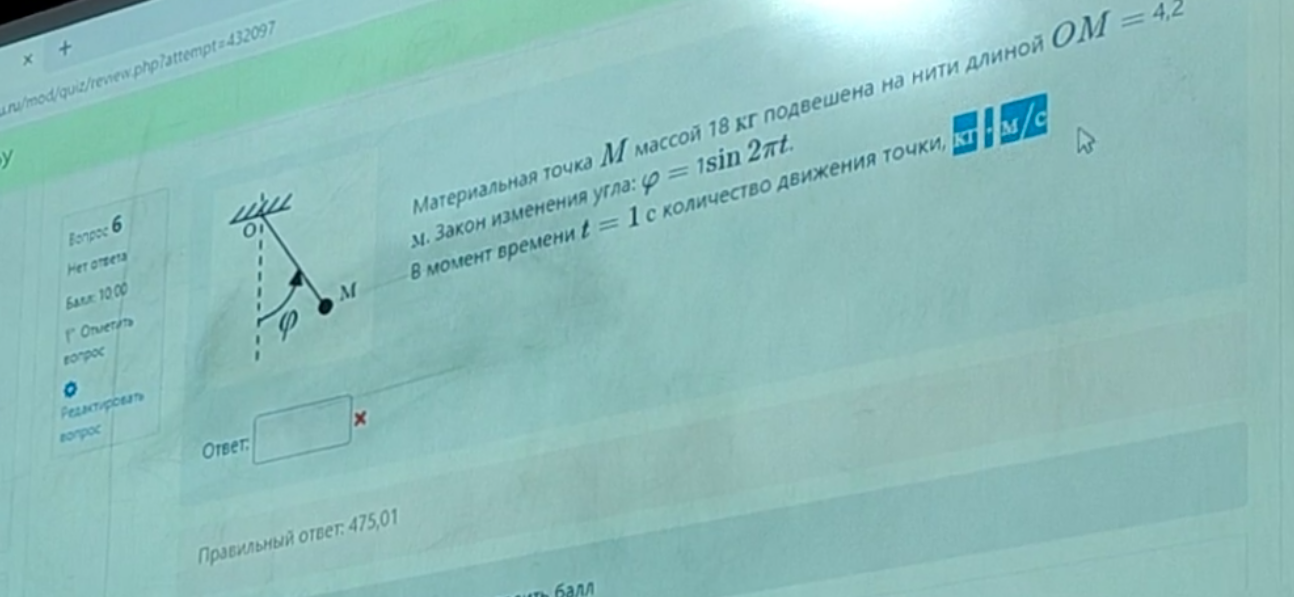
тержень AB вращается вокруг оси , перпендикулярной плоскости чертежа проходящей черещ точкуМатериальная точка М массой 18 кг