Файл: Контрольная работа по дисциплине Мелиоративные машины.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.04.2024
Просмотров: 12
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

МИНИСТЕРСТВО СЕЛЬСКОГО ХОЗЯЙСТВА
РОССИЙСКОЙ ФЕДЕРАЦИИ
ФГОУ ВО «КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ»
Кафедра «Машин и оборудования в агробизнесе »
Контрольная работа
по дисциплине «Мелиоративные машины»
Выполнил: студент 5курса
Группы Б282-01
Гурьянова К.А..
Шифр: М318211
Проверил: Хусаинов Р.К.
Казань 2023
12. Описать, пояснить схемой, устройство, рабочий процесс и технологические регулировки: Плоскореза-глубокорыхлителя.
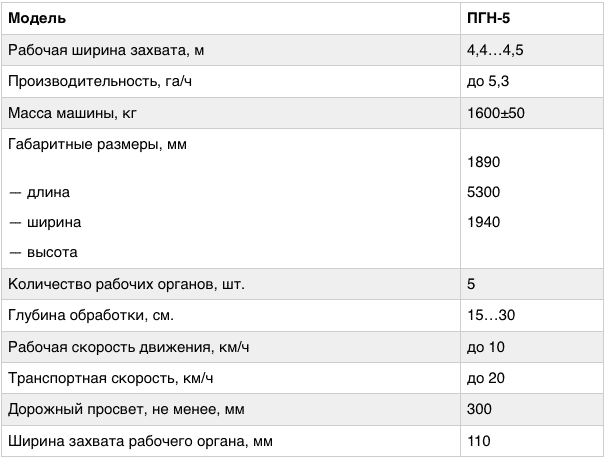
Плоскорез-глубокорыхлитель STAVR ПГ-5 предназначен для основной обработки паров, осенней обработки почвы с максимальным сохранением стерни и других пожнивных остатков на поверхности поля после колосовых и пропашных предшественников в целях зашиты почвы от ветровой эрозии. Применяется в степных районах с недостаточным и неустойчивым увлажнением и почвами, склонными к ветровой эрозии.
Стрельчатые рабочие органы, состоящие из двух расположенных под углом лемехов и долота, производят полное подрезание сорняков, рыхлят почву с максимальным сохранением стерни.
Техника складывается гидравликой и может транспортироваться по дорогам общего пользования.
Преимущества плоскореза STAVR ПГ-5:
- Два вида навесок: для агрегатирования с тракторами К-744 и для агрегатирования с импортными тракторами;
- Рабочие органы, состоящие из двух расположенных под углом лемехов и долота, производят полное подрезание сорняков, рыхлят почву с максимальным сохранением стерни;
- Защита от ветровой эрозии почвы (происходит задержка снега);
- Лемехи и долота для повышения износостойкости наплавлены твердым сплавом;
- Удобная транспортировка. Переводится в транспортное положение с помощью гидравлической системы;
- Регулируемый рабочий орган. Изменение угла вхождения (атаки) при работе на твердых почвах;
- Простота конструкции и регулировки.
Обработка почв производится на глубину от 15 см до 30 см с рабочей шириной захвата в 5,3 метра, на участках не засоренных камнями, плитняком и другими препятствиями, с удельным сопротивлением до 0,9 кг/см2 (0,09.МПа), твердостью до 30 кг/см2 (3,0 МПа) и влажностью до 22%.
Производительность ПГ-5 — 5,3 гектара в час. Агрегатируется с тракторами мощностью 250-330 л.с.: К-701, К-424, К-744 и др.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ:
Конструкция и принцип работы
Рабочие органы, состоящие из двух расположенных под
углом лемехов и долота, производят полное подрезание сорняков, рыхлят почву с максимальным сохранением стерни.
Гидравлическая система переводит технику в транспортное положение и обратно.
Преимущества плоскорезов STAVR
Преимущества:
Рабочие органы, состоящие из двух расположенных под углом лемехов и долота, производят полное подрезание сорняков, рыхлят почву с максимальным сохранением стерни.
Регулируемый рабочий орган. Изменение угла вхождения (атаки) при работе на твердых почвах.
Лемех и долота для повышения износостойкости наплавлены твердым сплавом.
Защита от ветровой эрозии почвы (происходит задержка снега)
Удобная транспортировка. Переводится в транспортное положение с помощью гидравлической системы.
Простота конструкции и регулировки
высокая маневренность
32. Описать, пояснить схемой, устройство, рабочий процесс и технологические регулировки: каналокапатель с комбинированными рабочими органами.
Комбинированный рабочий орган каналокопателей состоит из нескольких рабочих органов, каждый из которых разрабатывает определенную часть поперечного сечения канала. Большую группу среди таких рабочих органов составляют активно-пассивные — сочетание активного рабочего органа с пассивным, работающим от тягового усилия трактора.
Плужно-роторный каналокопатель МК-17 разрабатывает канал комбинированным рабочим органом — отвалом и ротором. Наклонный ротор расположен впереди отвала плужного типа. Пассивный цилиндрический отвал вырезает часть грунта и направляет его на ротор с осью вращения, перпендикулярной откосу. Ротор разрыхляет грунт остальной части сечения, образуя опережающую щель, выносит весь грунт за пределы канала и располагает его вдоль трассы в виде кавальера 10. Глубина подготавливаемого канала 0,5 м, ширина по дну 0,35 м.
Каналокопатель навешен на тракторе при помощи стандартной навесной системы. Ротор вращается от ВОМ трактора. На роторе расположены режущие элементы и выбросные лопатки. Дальность отброса грунта регулируют поворотным открылком направляющего кожуха при помощи гидроцилиндра. Отвал жестко закреплен на раме машины. Положение рабочего органа регулируют при помощи дополнительного гидроцилиндра. Каналокопатель снабжен указателем глубины канала. Спереди трактора помещен противовес. В транспортном положении раму машины фиксируют специальным устройством
Плужно-фрезерные {плужно-роторные) экскаваторы-каналокопатели с односторонним выбросом грунта (рис. 2.9) имеют рабочий орган, состоящий из наклонной фрезы 9 и плуга 8. Рабочий орган крепится к навесной системе 7 базового трактора ДТ-75БВ-С4 при помощи рамы 4. Подъем (опускание) рабочего органа осуществляется гидроцилиндром 2. Привод фрезы механический от ВОМ трактора через карданный вал 3 и конический редуктор 6. Для регулирования дал выброса грунта рабочий орган имеет направляющий кожух 5, положение которого может меняться гидроцилиндром 7.
При движении машины плужный рабочий орган 7 разрабатывает часть сечения канала глубиной 0,6-1,1 м, профилирует один из откосов и подает весь грунт к фрезе 2, находящейся впереди плужного рабочего органа с осью вращения, перпендикулярной откосу. Фреза, снабженная режущими ножами 4, 5, лопатками 3 и рушителями, профилирует второй откос, выносит весь разработанный грунт из канала и частично разбрасывает его или образует кавальер с помощью направляющего кожуха.
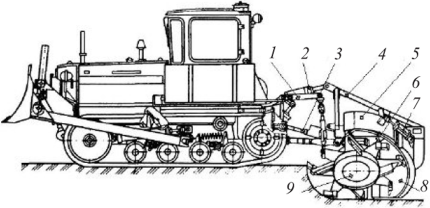
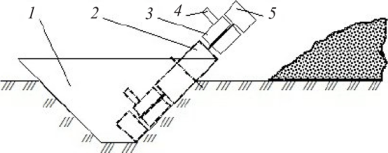
Схема плужно-фрезерного (плужнороторного) рабочего органа
Ш
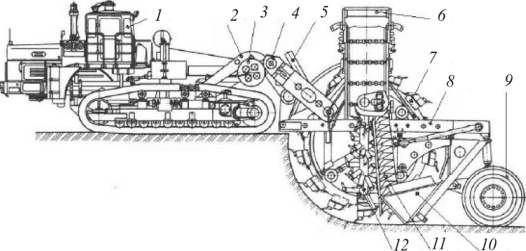
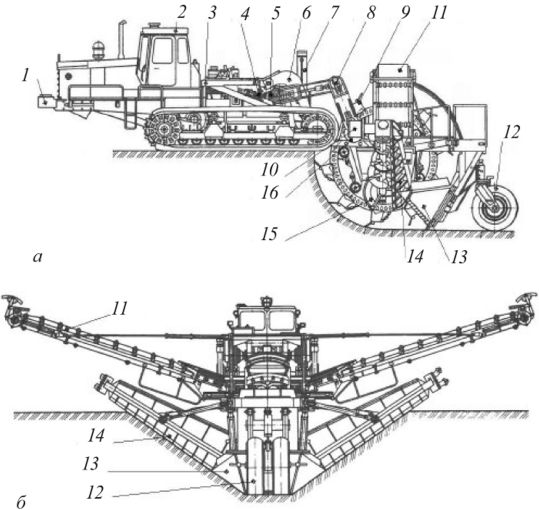 некороторный экскаватор-каналокопатель с коническими шнеками ЭТР-206А выполнен по полуприцепному варианту агрегатирования рабочего оборудования и состоит из гусеничного тягача 2, рабочего органа в виде ковшового ротора 9, по бокам которого симметрично расположены два конических наклонных ленточных шнека 15. За ротором и за шнеками расположены задние 13 и боковые 14 зачистные устройства. Рабочее оборудование перемещается относительно рамы тягача 3 при помощи поворотной рамы 6 и гидроцилиндра подъема 7. При работе рабочий орган опирается на заднюю опору 12. Привод ковшового ротора осуществляется от трансмиссии тягача через муфту предельного момента 4, дифференциальный редуктор 5, шарнирную цепную передачу 8, вал привода 16, привод шне2. Каналокопатели ков 15 — от редукторов 10. Грунт из ковшей ротора поступает на ленточные конвейеры 11 и отбрасывается в боковые отвалы. В передней части тягача установлен противовес
некороторный экскаватор-каналокопатель с коническими шнеками ЭТР-206А выполнен по полуприцепному варианту агрегатирования рабочего оборудования и состоит из гусеничного тягача 2, рабочего органа в виде ковшового ротора 9, по бокам которого симметрично расположены два конических наклонных ленточных шнека 15. За ротором и за шнеками расположены задние 13 и боковые 14 зачистные устройства. Рабочее оборудование перемещается относительно рамы тягача 3 при помощи поворотной рамы 6 и гидроцилиндра подъема 7. При работе рабочий орган опирается на заднюю опору 12. Привод ковшового ротора осуществляется от трансмиссии тягача через муфту предельного момента 4, дифференциальный редуктор 5, шарнирную цепную передачу 8, вал привода 16, привод шне2. Каналокопатели ков 15 — от редукторов 10. Грунт из ковшей ротора поступает на ленточные конвейеры 11 и отбрасывается в боковые отвалы. В передней части тягача установлен противовес
Начало формы
Шнекороторный экскаватор-каналокопатель ЭТР-206А: a — вид сбоку; б — вид сзади. Ковшовым ротором разрабатывают среднюю часть поперечного сечения канала на ширину дна, а коническими шнеками — грунт вниз к ковшам ротора. Часть грунта, не захватываемая ротором и шнеками, обрушивается под действием силы тяжести и захватывается ковшами. Из ковшей ротора грунт поступает на два ленточных конвейера 11 (см. рис. 2.11), которые при помощи направляющих козырьков подают его в кавальеры. Задние 13 и боковые 14 зачистные устройства зачищают и окончательно планируют дно и откосы канала.
Более совершенным является шнекороторный экскаватор-каналокопатель ЭТР-208
52. Описать, пояснить схемой, устройство, рабочий процесс и технологические регулировки: машины для получения заданного уклона дна траншеи.
Системы и механизмы, предназначенные для обеспечения требуемых уклона, глубины и прямолинейности дрен или каналов независимо от рельефа пути машины, можно классифицировать следующим образом.
По способу задания уклона системы бывают копирными, бескопирными и комбинированными.
Копирные системы поддерживают уклон, реагируя на отклонение рабочего органа от копирной (базовой) прямой. В качестве базовой прямой используются копирный трос, луч лазерного излучателя, модулированный луч светового излучателя, оптическая ось наблюдательного прибора, воображаемая прямая, проходящая через центры визирок.
Бескопирные системы поддерживают уклон, перемещая рабочий орган по заданной программе в зависимости от времени или пройденного пути или используя реакцию грунта на рабочий орган, а также датчики уклона, реагирующие на наклон машины или специального базового элемента. Последние также называют самоориентирующимися.
Комбинированные системы включают в себя элементы бескопирных и копирных систем, например, копирный трос и датчик уклона.При использовании на машине одновременно нескольких систем общую систему в целом называют
многокомпонентной.
По способу управления системы делятся на автоматические, с ручным и смешанным управлением.
По расположению оператора по отношению к машине системы с ручным управлением делятся на системы с непосредственным и дистанционным управлением.
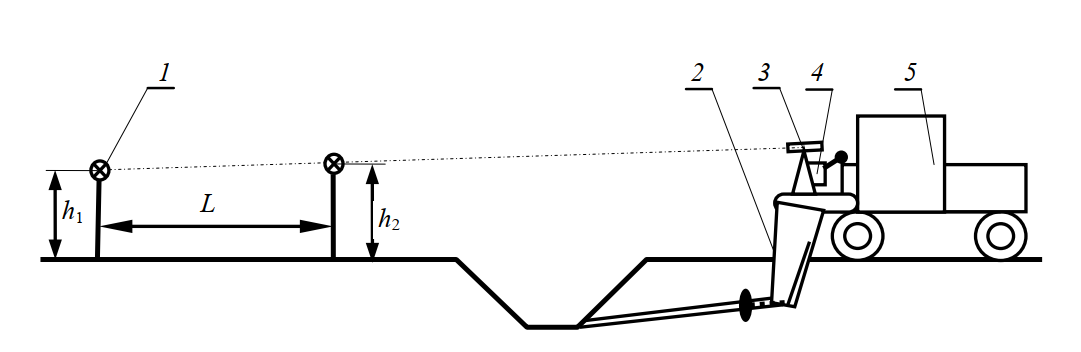 Схема копирной системы с использованием визирок: 1 – визирка; 2 – рабочий орган дренажной машины; 3 – наблюдательное приспособление; 4 – пульт управления; 5 – дренажная машина
Схема копирной системы с использованием визирок: 1 – визирка; 2 – рабочий орган дренажной машины; 3 – наблюдательное приспособление; 4 – пульт управления; 5 – дренажная машинаДля задания копирной линии сзади по ходу дренажной машины 5 устанавливаются две визирки 1 по оси будущей дрены. Исходная глубина дрены определяется высотой установки визирок. Чем большая требуется начальная глубина дрены, тем меньшей будет высота установки визирок. Требуемый уклон дрены i в таком случае определяется по формуле
i = (h2 – h1) / L, (1)
где h2 и h1 – высоты ближней к машине и дальней визирок; L – расстояние между визирками.
При использовании в качестве базовой линии оптической оси наблюдательного прибора применяется дистанционный ручной способ управления. Схема работы приведена на рис. 2.
В этом случае наблюдательный прибор 2 устанавливается сзади по ходу дреноукладчика 7. Уклон оптической оси прибора и его высота назначаются в соответствии с параметрами дрены. Дренажная машина устанавливается в ее начале и ориентируется вдоль оси будущей дрены. Рабочий орган 4 заглубляется до попадания в перекрестие зрительного поля прибора нужного деления линейки 5, установленной на раме рабочего органа. Команды на перемещение рабочего органа дает оператор, находящийся у наблюдательного прибора. Для передачи сигнала он имеет пульт 1, электрическим проводом 3 соединенный с катушкой 6 для наматывания провода. Провод присоединен к подвижному контакту катушки для передачи управляющего сигнала в электрогидросистему дренажной машины.
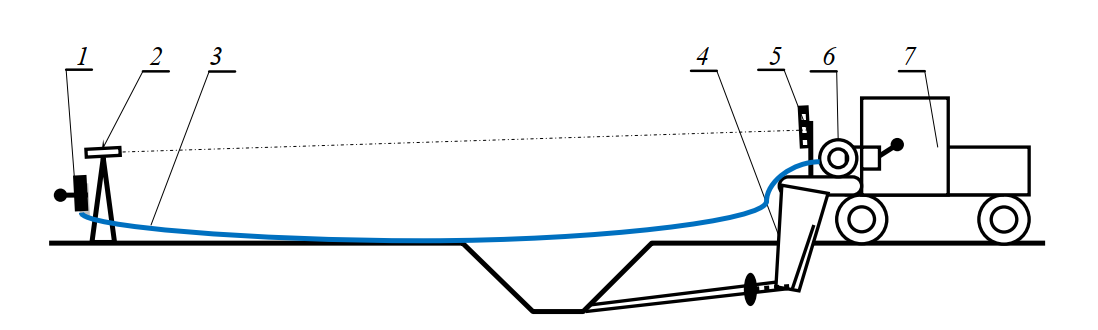
Схема копирной системы с использованием оптической оси наблюдательного прибора: 1 – пульт управления; 2 – наблюдательный прибор; 3 – электрический провод; 4 – рабочий орган дренажной машины; 5 – линейка; 6 – катушка; 7 – дренажная машина
Существуют подобные системы с беспроводной передачей сигнала от оператора, т. е. радиоуправляемые системы.

