Файл: Разработка вебприложения логической игры Найди пару по тематике игры God Of War.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.04.2024
Просмотров: 9
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
федеральное государственное автономное образовательное учреждение
высшего образования
«Северный (Арктический) федеральный университет имени М.В. Ломоносова»
Высшая школа информационных технологий и автоматизированных систем
(наименование высшей школы / филиала / института / колледжа)
РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА
| По дисциплине | Web-технологиям | |
| На тему | Разработка веб-приложения – логической игры «Найди пару» по тематике игры God Of War | |
| | ||
| | Выполнил обучающийся: Филимонов Илья Олегович | ||||
| | (Ф.И.О.) | ||||
| | Направление подготовки / специальность: 09.03.03 Прикладная информатика | ||||
| | (код и наименование) | ||||
| | Курс: 4 курс | ||||
| | Группа: 353915 | ||||
| | Руководитель: Пархимович Мария Николаевна, старший | ||||
| | преподаватель кафедры прикладной информатики и информационной безопасности | ||||
| | | ||||
| | (Ф.И.О. руководителя, должность / уч. степень / звание) | ||||
| Отметка о зачете | | | | | |
| | | (отметка прописью) | | (дата) | |
| Руководитель | | | | М.Н.Пархимович | |
| | | (подпись руководителя) | | (инициалы, фамилия) | |
Министерство науки и высшего образования Российской Федерации
федеральное государственное автономное образовательное учреждение
высшего образования
«Северный (Арктический) федеральный университет имени М.В. Ломоносова»
| | | | |||||||||||||||||||||||||||||||||
| | Кафедра информационных систем и информационной безопасности | | |||||||||||||||||||||||||||||||||
| | | | |||||||||||||||||||||||||||||||||
| | | | |||||||||||||||||||||||||||||||||
| | ЗАДАНИЕ НА РАСЧЕТНО-ГРАФИЧЕСКУЮ РАБОТУ | | |||||||||||||||||||||||||||||||||
| | | | |||||||||||||||||||||||||||||||||
| | по | Web-технологиям | | ||||||||||||||||||||||||||||||||
| | | | | ||||||||||||||||||||||||||||||||
| | студенту | ИТАС | высш. школы | 4 | курса | 353915 | группы | | |||||||||||||||||||||||||||
| | Филимонову Илье Олеговичу | | |||||||||||||||||||||||||||||||||
| | | | |||||||||||||||||||||||||||||||||
| |
| | |||||||||||||||||||||||||||||||||
| | ТЕМА: | Разработка веб-приложения – логической игры «Найди пару» | | ||||||||||||||||||||||||||||||||
| | по тематике игры God Of War | | |||||||||||||||||||||||||||||||||
| | | | |||||||||||||||||||||||||||||||||
| | ИСХОДНЫЕ ДАННЫЕ: | заполнить | | ||||||||||||||||||||||||||||||||
| | | | |||||||||||||||||||||||||||||||||
| | | | |||||||||||||||||||||||||||||||||
| | | | |||||||||||||||||||||||||||||||||
| | | | |||||||||||||||||||||||||||||||||
| | Срок выполнения с | « | 19 | » | января | 2023 г. по | « | 04 | » | февраля | 2023 г. | | |||||||||||||||||||||||
| | Руководитель работы | Ст. преподаватель | | | | М.Н. Пархимович | | ||||||||||||||||||||||||||||
| | | | | | (подпись) | | | | |||||||||||||||||||||||||||
| | | | | | | | | | |||||||||||||||||||||||||||
| | | | | | | | | | |||||||||||||||||||||||||||
| | | | | | |||||||||||||||||||||||||||||||
| | | | | | | | | | |||||||||||||||||||||||||||
| | | | | | | | | | |||||||||||||||||||||||||||
| | | | | | | | | | |||||||||||||||||||||||||||

 Архангельск, 2023
Архангельск, 2023Лист для замечаний
ОГЛАВЛЕНИЕ
Лист для замечаний 3
1 Постановка задачи 5
1.1 Описание решения задания 5
1.2 Описание координатной модели 5
1.3 Описание полигональной модели 6
2 Описание используемых алгоритмов 8
3 Описание программы 15
4 Тестирование программы 17
Заключение 21
Приложение. Листинг приложения 23
-
Постановка задачи
-
Описание решения задания
Чтобы решить задачу по созданию 3D объекта нужно выполнить следующие действия:
– Создать кривую линию, используя функцию x = 2 + cos(z) с задаваемым количеством точек.
– Произвести вращение линии вокруг оси Z. Количество рёбер должно быть задаваемым.
– Произвести преобразования из мировых в видовые координаты, а потом из видовых в экранные.
– Рассчитать нормаль и среднее Z для каждого полигона.
– Между точек рёбер создать полигоны, чтобы получился трёхмерный объект «Ваза».
– Закрасить полигоны цветом, в зависимости от нормали полигона.
-
Описание координатной модели
Для генерации 3D объекта я выбрал формулу x = 2 + cos(z). Функция косинуса – чётная с периодом равным
 . График функции на рисунке 1.
. График функции на рисунке 1.
Рисунок 1 – График функции x = 2 + cos(z)
Чтобы сгенерировать трёхмерный объект сначала надо сгенерировать нужное количество точек в пространстве от функции x = 2 + cos(z), а потом сгенерировать рёбра объекта, создавая копии кривой из этих точек, вращая их при этом вокруг оси Z.
В зависимости от необходимого количества рёбер, круг в 360 градусов делится на это количество и получается градус, на который надо отклонить каждое ребро одно от другого.
В своей работе для генерации я использую точки -3,6 и 4,2 на оси Z, что при генерации даёт объект похожий на вазу на рисунке 2.
Число генерируемых точек на кривой задаётся переменной «number_of_points».
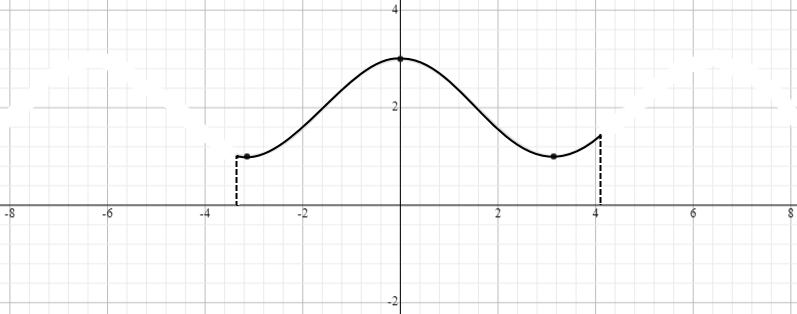
Рисунок 2
-
Описание полигональной модели
На рисунке 3 для демонстрации полигональной сетки я приведу вывод программы в режиме отрисовывания линий вместо полигонов.
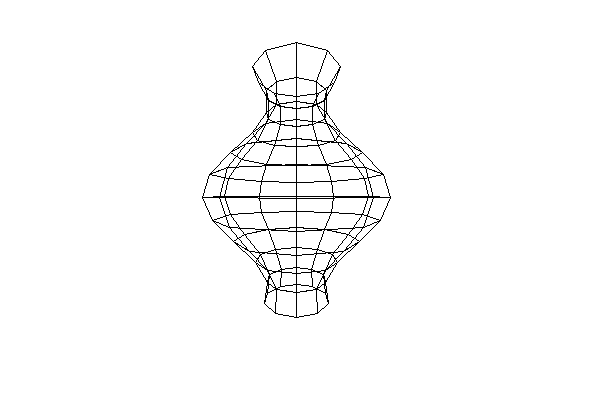
Рисунок 3 – Вывод программы при отрисовке линиями
Полигональная модель объекта генерируется на основе данных о сгенерированных рёбрах объекта.
Для каждого ребра объекта генерируются полигоны, которые соединяют это ребро с последующим. Последнее ребро соединяется полигонами с начальным ребром.
Дополнительно генерируется полигон дна вазы с нулевыми точками каждого ребра.
Каждое ребро состоит из точек, поэтому каждый полигон ребра объекта соединяет между собой 4 точки против часовой стрелки: начальную ребра номер n, начальную ребра n+1, следующую точку ребра n+1 и следующую точку ребра n. И так далее до конца ребра.

Рисунок 4 – Развёртка полигональной сетки
-
Описание используемых алгоритмов
-
Необходимые преобразования координат
Рассмотрим способ получения перспективных изображений на основе аналитической геометрии. Точки в двухмерном и трехмерном пространстве представляются их координатами (X, Y) и (х, у, z) соответственно. При необходимости получения перспективной проекции задается большое количество точек P (x, у, z), принадлежащих объекту, для которых предстоит вычислить координаты точек изображения Р'(Х, Y) на картинке. Для этого нужно только преобразовать координаты точки Р из так называемых мировых координат (х, у, z) в экранные координаты (X, Y) ее центральной проекции Р'. Будем предполагать, что экран расположен между объектом и глазом Е. Для каждой точки Р объекта прямая линия РЕ пересекает экран в точке Р'.
Это отображение удобно выполнять в два этапа. Первый этап назовем видовым преобразованием - точка Р остается на своем месте, но система мировых координат переходит в систему видовых координат. Второй этап называется перспективным преобразованием. Это точное преобразование точки Р в точку Р' объединенное с переходом из системы трехмерных видовых координат в систему двухмерных экранных координат:

Рисунок 5 – Преобразования
-
Видовое преобразование
Для выполнения видовых преобразований должны быть заданы точка наблюдения и объект. Будет удобно, если начало системы мировых координат располагается вблизи центра объекта, поскольку объект наблюдается в направлении от Е к О на рисунке 2. Пусть точка наблюдения Е будет задана в сферических координатах
 по отношению к мировым координатам. То есть мировые координаты (точки Е) могут быть вычислены по формулам:
по отношению к мировым координатам. То есть мировые координаты (точки Е) могут быть вычислены по формулам:


Обозначения сферических координат схематически изображены на рисунке 2.


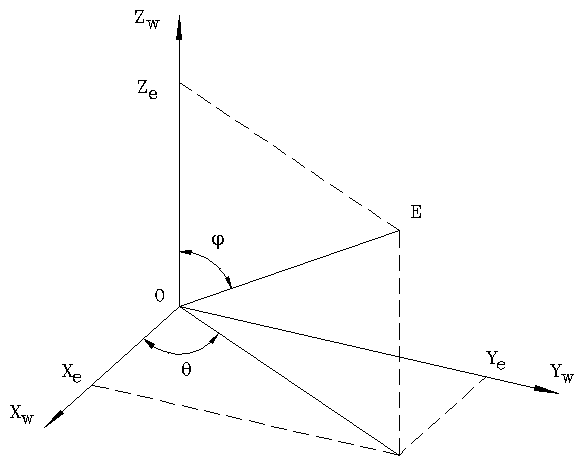
Рисунок 6 - Сферические координаты точки наблюдения Е
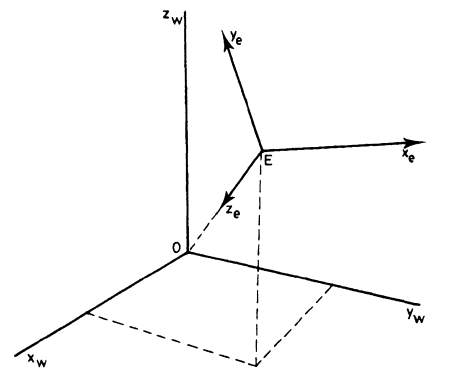
Рисунок 7 - Система видовых координат
Видовое преобразование может быть записано в форме
[хe ye ze 1]=[хwуw zw 1]V (2)
где V - матрица видового преобразования размерами 4х4.
Матрица V, полученная в процессе видового преобразования, выглядит следующим образом:
 (3)
(3)-
Перспективное преобразование
На рисунке 4 выбрана точка Q, видовые координаты которой равны (0, 0, d) для некоторого положительного числа d. Плоскость z = d определяет экран, который будет использоваться следующим образом. Экран — это плоскость, проходящая через точку Q и перпендикулярная оси z. Экранные координаты определяются привязкой начала к точке Q, а оси Х и Y имеют такие же направления, как оси х и у соответственно. Для каждой точки объекта Р точка изображения Р' определяется как точка пересечения прямой линии