ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 6
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Лекция №12
Механизмы поворота кранов.
Особенностью механизмов ворота является малые скорости вращения и большие передаточные числа редукторов. Поэтому целесообразно здесь применять компактные передачи – планетарные. волновые, а также гидравлический привод. обладающий малыми габаритами и большой надежностью.
Механизмы поворота предназначены для вращения поворотной части крана вместе с грузом относительно вертикальной оси. Механизмы поворота можно классифицировать по следующим признакам:
По расположению на кране: механизм установлен на неповоротной раме крана и вращает зубчатый венец; механизм установлен на поворотной части крана и вращается вместе с ним.
По конструкции: с горизонтальным расположением двигателя и червячным или зубчатым редукторами и с канатным приводом; с вертикальным расположением двигателя и применением планетарного или волнового редукторов; с гидравлическим приводом.
По количеству двигателей: однодвигательные (с одной приводной шестерней и двумя шестернями, передающими вращение на зубчатый венец); многодвигательные, которые имеют модификации: 2 двигателя работают на один общий привод и 2-4 одинаковых привода работают на общий зубчатый венец.
Для современных кранов наиболее рациональным механизмом поворота является привод с вертикальным расположением двигателя с планетарным или волновым редукторами, характеризующийся компактностью конструкции, легкостью и простотой обслуживания.
Все большее распространение находит гидравлический привод механизма поворота, обладающий широкой и плавной регулировкой скорости поворота, компактностью и большой надежностью.
Механизм поворота с канатным приводом применяется на кранах большой грузоподъемности, но имеет недостатки: большие габариты и масса, малая точность остановки.
Механизм с волновым редуктором с большим передаточным числом позволяет исключить применение открытых зубчатых передач.
В новых кранах применяют планетарные механизмы поворота. Передаточное число редуктора зависит от соотношения числа зубьев колеса и шестерни:
Сопротивление в опорах при повороте крана.
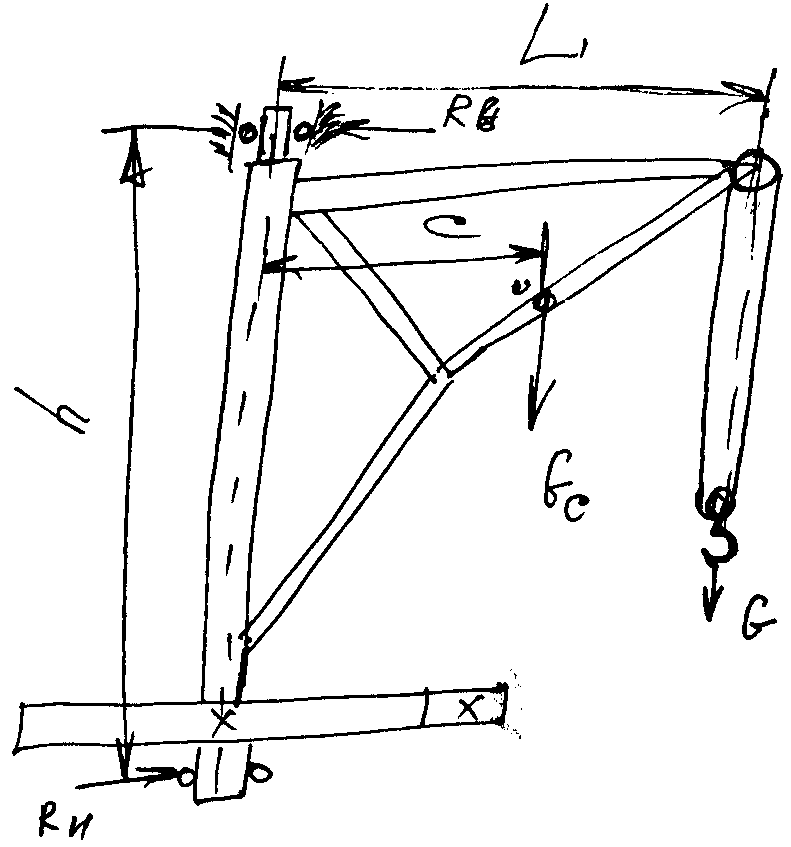
1. Сопротивление в подшипниковых опорах крана с вращающейся колонной:
Вертикальная реакция
где
Горизонтальные реакции находят из уравнения равновесия:
где
Статический момент сопротивления повороту равен сумме моментов сил трения в опорах
1) Момент сил трения
где
2) Момент от ветровых нагрузок
где
3) Момент от уклона
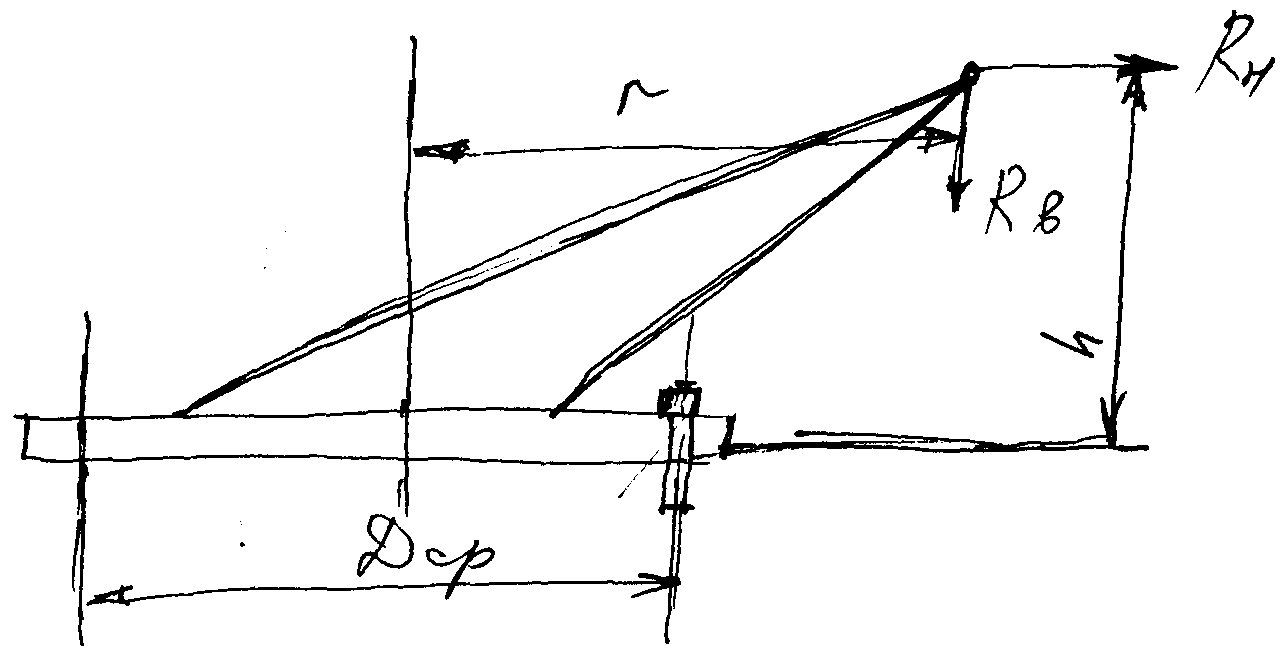
2. Сопротивление в роликовой опоре и подшипниках крана с неподвижной колонной.

Вертикальное усилие, воспринимаемое упорным подшипником верхней опоры, равно сумме веса поднимаемого груза
Для увеличения устойчивости крана и уменьшения изгибающих моментов, действующих на колонну, устанавливают противовес.
Вес противовеса определяется из условия равенства суммы статических моментов, действующих на кран в нагруженном и разгруженном состояниях:
 .
.В связи с переменным весом груза на крюке кран не бывает полностью уравновешен: при номинальной грузоподъемности колонна крана изгибается в сторону груза моментом от половины веса груза, и при отсутствии груза – в сторону противовеса.
Горизонтальную реакцию находим из уравнения моментов для груженного крана:
Статический момент сопротивления повороту равен сумме моментов от сил трения, ветра и уклона:
Момент сил трения:
 ,
,где
Момент от ветровых нагрузок, действующий на кран и груз:
Момент сил. возникающих при отклонении пути от вертикали:
.
3
. Сопротивление в ролико-шариковых опорных кругах.
В шариковых и роликовых опорно-поворотных устройствах все действующие силы можно привести к вертикальной силе
Момент сил сопротивления вращению в шариковых и роликовых опорах определяет по эмпирической формуле:
где
Мощность привода.
В период пуска механизма двигатель преодолевает, кроме статических нагрузок, моменты от сил инерции вращающихся масс привода, МК и груза:
где
где
Расчетная мощность двигателя:
где
Передаточное число механизма:
.
Проверку двигателя по условиям нагрева ведут или по среднеквадратическому моменту или по методу номинального режима работы.
Тормоз в механизме поворота крана рассчитывают из условий преодоления моментов от действия ветровых нагрузок и уклона пути; силы сопротивления от трения в опорах уменьшают величину тормозного момента.
С целью уменьшения габаритов тормоза его устанавливают на валу двигателя.
Тормозной момент:
где
Если тормоз установлен не на валу двигателя, то все моменты следует приводить к валу тормоза.