Файл: Монтаж, наладка и ремонт автоматизированной токовой системы передачи информации.docx
Добавлен: 03.05.2024
Просмотров: 11
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ДЕПАРТАМЕНТ ОБРАЗОВАНИЯ ГОРОДА МОСКВЫ
Государственное бюджетное профессиональное образовательное учреждение города Москвы
«Политехнический колледж им. Н.Н. Годовикова»
Допустить к защите
Зам. директора по профессиональному
образованию
________________ И.В. Бойцова
«___»__________________2021г.
Курсовая работа
«Тема: «Монтаж, наладка и ремонт автоматизированной токовой системы передачи информации»
| Выполнила: | Руководитель работы: |
| Студент …. курса, группы …… | Преподаватель |
| Ученая степень, должность | |
| спец. дисциплин Киселева Наталья Павловна | |
| (Ф.И.О.) | (Ф.И.О.) |
| ______________________________ | ______________________________ |
| (подпись) | (подпись) _____________________________________________ оценка |
Москва, 2021
ДЕПАРТАМЕНТ ОБРАЗОВАНИЯ ГОРОДА МОСКВЫ
Государственное бюджетное профессиональное образовательное
учреждение города Москвы
«Политехнический колледж им. Н.Н. Годовикова»
| УТВЕРЖДАЮ Зам. директора по профессиональному образованию _______________И. В. Бойцова «____» _______________ 2021 г. | Рассмотрено на заседании (предметной) цикловой комиссии Автоматизация технологических процессов Протокол № __ от «___» ________2021 г. Председатель комиссии _________И.О.Ф. |
З А Д А Н И Е
Для курсовой работы по специальности «Автоматизация технологических процессов и производств»
Студент курса ______ группы
Ф.И.О.
Тема задания: «Монтаж, наладка и ремонт автоматизированной токовой системы передачи информации»
Основные вопросы, подлежащие разработке:_________________________
Дата выдачи задания «___» __________ 20… г.
Сроки выполнения разделов дипломной работы:
| Введение Теоретическая часть Практическая часть Заключение | с ________________ по _____________ с ________________ по _____________ с ________________ по _____________ с ________________ по _____________ |
Руководитель курсовой работы:_______________ __________________
(подпись руководителя) (инициалы, фамилия)
Задание получил « » 20…_ г. студент ______________ ________________
(подпись руководителя) (инициалы, фамилия)
Содержание
Введение 3
1 Выбор и обоснование системы САУ 5
2 Принцип действия и назначение разрабатываемой автоматической токовой системы 10
3 Описание блоков, входящих в проектируемую систему 13
4 Функциональная схема проектируемой системы 17
5 Выбор типовых элементов функциональной схемы проектируемой системы 19
6 Монтажная схема проектируемой системы 24
7 Приборы и оборудование для монтажных работ 27
8 Наладка регулятора. Виды неисправностей и их устранение 29
9 Расчетная часть 31
Выводы 40
Список использованной литературы 41
Приложение 1 42
Приложение 2 43
Приложение 3 44
Приложение 4 45
 Введение
ВведениеКраткая характеристика исследования. В настоящее время наиболее современной технологией применяемой для передачи разнообразной информации является импульсы, связанные с величиной токовых импульсов.
Актуальность темы исследования. Передача сигнала производится различными способами, каждый способ обладает определенной защищенностью информации. Токовая система передачи информации обладает своеобразным алгоритмом шифрования данных.
Важность исследования. Такой подход позволяет оценить степень понимания дисциплины каждым студентом в индивидуальном порядке.
Объект исследования – автоматизированная токовая система передачи информации.
Предмет исследования – монтаж, наладка и ремонт системы передачи информации.
Цель исследования – описать функциональные возможности и преимущественные характеристики автоматизированной системы передачи информации.
Задачи исследования:
-выбрать и обосновать схему САУ;
-указать принцип действия и назначение разрабатываемой автоматизированной токовой системы передачи информации;
-описать блоки, входящие в проектируемую систему;
-разработать функциональную схему проектируемой системы;
-выбрать типовые элементы проектируемой системы;
-составить перечень оборудования для монтажных работ;
-сформировать алгоритм действий при наладке системы, перечень неисправностей и способы их устранения;
-выполнить расчетную часть;
-сформулировать выводы по проведенному исследованию.
 Пути решения поставленных задач – использование существующих проектных и конструкторских решений с их адаптацией относительно обозначенного результата.
Пути решения поставленных задач – использование существующих проектных и конструкторских решений с их адаптацией относительно обозначенного результата.Аргументация выбора и применение объекта на производстве. Выбор объекта для внедрения системы определяется эксплуатационной необходимостью усовершенствования технологического процесса.
Целесообразность использования системы проектируемой системы в народном хозяйстве – не предусмотрено для внедрения в данном направлении.
Методы исследования – анализ нормативно-технической документации и математический расчет проектируемой системы.
Структура работы: введение, основная часть, разделенная на параграфы, заключение, список использованной литературы.
 1 Выбор и обоснование системы САУ
1 Выбор и обоснование системы САУСтруктурная схема САУ представлена на рисунке 1 (прил.1).
1 – датчики измерения значения тока;
2 – блок сравнения; 3 – ограничитель допустимых отклонений;
4 – пусковое реле; 5 – исполнительный механизм; 6 – реле сравнения;
7 – ключ; 8 – указатель положения блока сравнения; 9 – реле надстройки; 10 – датчик записи данных; 11 – задающее устройство;
12 – интегратор; 13 – разветвитель сигнала; БИ – блок измерений;
БЭ – блок электронный; ВЭ – выходной элемент;
ПОС – положительная обратная связь,
ООС – отрицательная обратная связь
Рисунок 1 – Структурная схема САУ
Сигналы от измерительных датчиков тока поступают блок сравнения. Далее каждый сигнал сравнивается по уровню с запрограммированной величиной, как по отдельности, так и суммарно.
При отклонении от заданного параметра, превышающего допустимые пределы, сигнал передается на электронный блок БЭ. Выходной элемент ВЭ электронного блока воздействует на пусковое устройство исполнительного механизма и устройство обратной связи по выходному сигналу ОС, которое может быть как положительным, так и отрицательным.
В зависимости от типа управляющего устройства (диод, транзистор, тиристор) датчики контроля тока подразделяются на несколько типов:
-с релейным выходным элементом;
-с бесконтактным выходным элементом.
В каскадных схемах автоматического регулирования могут применяться бесконтактные задающие устройства 11, которые контролируют допустимое отклонение и стабилизируют работу схемы блока сравнения 2, который поддерживает запрограммированный уровень параметра (в данном случае тока), существенно влияющий на условия поддержания корректирующим прибором заданного режима работы объекта.
Комплектная токовая система контроля и передачи информации предназначена для внутреннего щитового монтажа в закрытых помещениях. В состав системы входят следующие компоненты:
1. Первичные фиксирующие (датчики);
2. Функциональные измерительные приборы (преобразователи);
3. Задающие и контролирующие приборы, которые обеспечивают формирование необходимого закона регулирования.
Все элементы системы конструктивно выполнены в виде раздельных блоков (измерительного и электронного), которые смонтированы в общем корпусе и имеют дополнительную. Защиту от помех. Органы настройки регулятора выведены на его лицевую панель.
Аппаратуру следует предохранять от влаги, воздействия магнитных полей, теплового излучения и значительных вибраций.
Соединение элементов системы с другими компонентами автоматической схемы осуществляется медным кабелем сечением не менее 1,5 мм2, но не более 4 мм2, так как может быть снижена чувствительность токовой системы.
Измерительные цепи от первичных фиксирующих датчиков и ограничителя внешних отклонений могут быть запитаны одним кабелем, при этом силовые цепи стоит разделять не только электрически, но и гальванически, для исключения возможности появления
Интегратор сигналов постоянного/переменного тока применяется в качестве устройства в системах, которые производят преобразование сигналов, как по форме, так и по типу:
-индукционные;
-дифференциально-трансформаторные;
-реостатные.
Основополагающие законы управления:
-закон разомкнутого управления;
-закон компенсации – управления при наличие возмущающего сигнала;
-закон обратной связи (положительная связь менее устойчива, чем отрицательная).
Для системы автоматического управления (далее – САУ) с обратной связью (далее – ОС) характерны: преобразование слабых управляющих сигналов на входе, идущих от измерительного устройства, в более мощные воздействия на объект; наличие ошибки рассогласования (t), являющейся движущим сигналом для системы, работающей на уменьшение ошибки; замкнутость системы через обратную связь.
Электрические токовые системы можно разделить на две основные группы:
 -по типу управляющего сигнала;
-по типу управляющего сигнала; -по времени воздействия управляющего сигнала.
-по времени воздействия управляющего сигнала.Электрические токовые системы могут быть как ручного, так и автоматического управления.
Как правило, САУ представляют собой технические средства или комплекс технических и программных средств, обеспечивающих и/или выполняющих следующие функции:
-сбор и вывод информации о состоянии объекта автоматизации, параметрах измерительных процессов (функция контроля);
-определение, выявление и исполнение управляющих воздействий на объект автоматизации (функции управления).
САУ могут управлять любым производственным процессом, область их применения достаточно широка и многогранна (от промышленности до сельского хозяйства).
САУ фиксируют задаваемый параметр в установленных пределах. Они представляют собой симбиоз управления и контроля. При этом важную роль отводят фиксирующим датчикам, от работы которых зависит алгоритм принимаемых решений и переключений.
При выполнении функций по поддержанию заданных параметров система классифицируется как стабилизационная.
Если САУ выполняет функции программного измерения быстродействия, то она относится к временным типам.
САУ может контролировать весь производственный цикл или один технологический процесс, в таком случае она будет состоять из следующих компонентов [1]:
-датчик;
-усилитель;
-исполнительный элемент.
Итак, тип проектируемой САУ зависит от контролируемых параметров и типа управляющего сигнала.
 2 Принцип действия и назначение разрабатываемой автоматической токовой системы
2 Принцип действия и назначение разрабатываемой автоматической токовой системыДля питания схемы управления составим принципиальную схему питания САУ, в основе которой заложено регулирование токовой нагрузкой, представлено на рисунке 2 (прил.2).

Рисунок 2 – Принципиальная схема питания проектируемой системы
Алгоритм переключения (работы) принципиальной схемы указывается в технической документации после разработки опытного образца.
Характерным параметром, которым следует регулировать ток является частота, поэтому для питания САУ необходим асинхронный двигатель с частотным управлением [2].
 На электрических схемах обычно изображают каждый элемент электрооборудования, участвующий в технологическом процессе или контролирующего его течение.
На электрических схемах обычно изображают каждый элемент электрооборудования, участвующий в технологическом процессе или контролирующего его течение.Принято слева размещать силовые цепи, обозначая жирной линией, а для цепей управления место на схеме – с правой стороны они изображены в виде тонкой линии. Составляя схему, условно считают, что все элементы цепей в отключенном состоянии.
У элементов – схематическое представление, им даны позиционные обозначения в виде букв. В случае одного электродвигателя – М, а если их несколько – М1, М2, М3 (в буквенном и числовом выражении). Если строят схемы расположения, на них (в масштабном изображении) фиксируют все, что относится к электрооборудованию.
Там, где место для элементов соединения – проводов и кабелей, – тонкая линия. Такие схемы строятся, изображая конкретные узлы фрезера, их имеет электрошкаф и пульт управления.
Принципиальную схему выполняют, не придерживаясь масштаба и не указывая, как в действительности расположены отдельные элементы.
Токовая система должна отвечать ряду требований:
1.Ток настройки должен быть равно 5 ± 0,2 А.
2.Блуждающий ток на выходном транзисторе не должно превышать 0,6 А;
3.Температурный диапазон работы микросхемы должен находиться в интервале температур от - 450 С до + 1000 С.
4.Температурный коэффициент тока настройки должен находится в диапазоне от 2,5 до 3 мА/0С.
Блок-схему устройства представим на рисунке 3 (прил.3).
1 – измеритель тока; 2 – генератор; 3 – элемент сравнения с заданной величиной; 4 – регулируемый элемент; 5 – измерительный элемент
Рисунок 3 – Блок-схема САУ
Принцип работы блок-схемы: к проектируемой системе обязательно должен быть подведен управляющий ток, который формирует генератор, аккумуляторная батарея или другой источник, а также подсоединена обмотка возбуждения генератора.
При расширенных функциональных возможностях количество контролируемых параметров может быть увеличено. Если функции регулятора расширены, то и число подсоединений его в схему растет. Чувствительным элементом токовой системы является преобразователь.
С его входа поступает управляющий сигнал на элемент сравнения, где роль эталонной величины играет обычно напряжение стабилизации стабилитрона.
Итак, блок-схема является важной и неотъемлемой частью проектирования системы передачи информации.
3 Описание блоков, входящих в проектируемую систему
Схема блока измерения представлена на рисунке 4 (прил.4).
Рисунок 4 – Схема блока испытаний
Системы, в основе работы которых заложен принцип контроля параметров относительно управляющего тока позволяют автоматизировать технологические процессы, т. е контролировать и регулировать такие параметры как температуру, давление, расход, уровень и др.
Представленный на рисунке 4 блок измерений может применяться для измерения температуры. Если подключить вместо термопар другой датчик, например, измеритель напряжения, то блок будет измерять текущее напряжение.
Имеется и другая разновидность схем электронных регуляторов, в которых частота переключения строго задана. Регуляторы такого типа оборудованы широтно-импульсным модулятором (ШИМ), который и обеспечивает заданную частоту переключения. В схемах могут применяться частотно-импульсная модуляция ЧИМ и широтно-импульсная модуляция ШИМ (рис.5-8) [3].
Рисунок 5 – ШИМ с последовательным включением вентиля
Рисунок 6 – ШИМ с последовательным LC-фильтром
Рисунок 7 – ШИМ с параллельным включением задающего прибора
Рисунок 8 – ШИМ с регулируемым выходным напряжением
На рисунке 6 изображена схема с LC-фильтром и активной нагрузкой. При открытом тиристоре V1 нагрузка и конденсатор подключены к источнику питания через индуктивность L. При закрытом V1 тиристоре ток, поддерживаемый ЭДС самоиндукции индуктивности L, замыкается через диод V2. ШИП успешно работает в режиме непрерывного тока через индуктивность L. На рисунке 6, в изображена схема ШИП с параллельно включенным ключевым прибором. При открытом тиристоре V1 напряжение источника питания приложено к индуктивности, в которой запасается энергия. Конденсатор С разряжается на нагрузку, и диод V2 закрывается.
 Когда тиристор V1 выключается, энергия, запасенная в индуктивности L, поступает в нагрузку и одновременно заряжается конденсатор С. На рисунке 8 изображена схема ШИП с выходным напряжением, регулируемым выше и ниже входного напряжения. При открытом тиристоре ток протекает через индуктивность и в ней накапливается энергия. Диод V2 закрыт, и через нагрузку протекает ток конденсатора. При закрытом тиристоре через нагрузку протекает ток за счет энергии, накопленной в индуктивности
Когда тиристор V1 выключается, энергия, запасенная в индуктивности L, поступает в нагрузку и одновременно заряжается конденсатор С. На рисунке 8 изображена схема ШИП с выходным напряжением, регулируемым выше и ниже входного напряжения. При открытом тиристоре ток протекает через индуктивность и в ней накапливается энергия. Диод V2 закрыт, и через нагрузку протекает ток конденсатора. При закрытом тиристоре через нагрузку протекает ток за счет энергии, накопленной в индуктивностиПрименение ШИМ снижает влияние на работу регулятора внешних воздействий, например, уровня пульсаций выпрямленного напряжения и т.п. Описание метода регулирования напряжения с помощью широтно-импульсной модуляции рассмотрены ниже. Данный метод основан на управлении транзистора импульсами с переменной скважностью при постоянной частоте этих импульсов.
В зависимости от скважности импульсов производится регулирование протекающего через транзистор тока. То есть чем больше скважность (Q = Тпер/Ти), тем более закрыт транзистор и тем меньший протекает через него ток и, наоборот, чем меньше скважность импульсов, тем более открыт транзистор и тем больший ток протекает через него.
На данном принципе и основано регулирование напряжения в бортовой сети автомобиля. С помощью широтно-импульсной модуляции производится управление работой выходного транзистора, который производит регулирование тока, протекающего через обмотку возбуждения генератора, который в свою очередь определяет напряжение на фазовых обмотках генератора. Применение широтно-импульсной модуляции в данной схеме снижает влияние на работу регулятора внешних воздействий, например, уровня пульсаций выпрямленного напряжения и т.п.

4 Функциональная схема проектируемой системы
 При сравнении спроектированной схемой, на основе ШИМ (рис.9) со структурной схемой, изображенной на рисунке один получаются следующие выводы: к измерительному элементу относится делитель напряжения 4, который формирует в зависимости от напряжения на входе микросхемы (на выходе генератора) определенный сигнал uизм. К элементу сравнения относятся следующие блоки: компаратор напряжения 5, цифровой счетчик 2 с резистивной матрицей 3, которые вместе формируют эталонное пилообразное напряжение. И, наконец, к регулирующему элементу относятся: триггерное устройство 8, выходной каскад 9, выходной транзистор 13, которые предназначены для изменения определенным образом тока, протекающего через обмотку возбуждения 14. Остальные блоки, расположенные на рисунке 7, имеют какое-либо другое специальное или вспомогательное значение [4].
При сравнении спроектированной схемой, на основе ШИМ (рис.9) со структурной схемой, изображенной на рисунке один получаются следующие выводы: к измерительному элементу относится делитель напряжения 4, который формирует в зависимости от напряжения на входе микросхемы (на выходе генератора) определенный сигнал uизм. К элементу сравнения относятся следующие блоки: компаратор напряжения 5, цифровой счетчик 2 с резистивной матрицей 3, которые вместе формируют эталонное пилообразное напряжение. И, наконец, к регулирующему элементу относятся: триггерное устройство 8, выходной каскад 9, выходной транзистор 13, которые предназначены для изменения определенным образом тока, протекающего через обмотку возбуждения 14. Остальные блоки, расположенные на рисунке 7, имеют какое-либо другое специальное или вспомогательное значение [4].
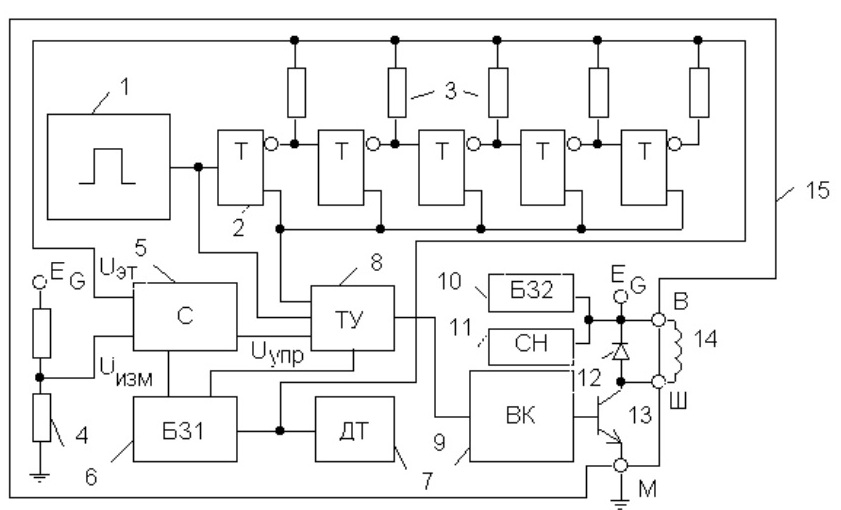
Рисунок 9 – Функциональная схема, устройства, предназначенного для передачи информации
 Обозначения, представленные на схеме 9:
Обозначения, представленные на схеме 9:
1 – генератор прямоугольных импульсов;
2 – пятиразрядный счетчик на Т-триггерах;
3 – резистивная матрица;
4 – резистивный делитель напряжения;
5 – компаратор напряжения;
6 – блок защиты 1;
7 – датчик температуры;
8 – триггерное устройство;
9 – выходной каскад;
10 – блок защиты 2;
11 – стабилизатор) напряжения;
12 – гасящий диод;
13 – выходной n-p-n- транзистор;
14 – обмотка возбуждения генератора;
15 – интегральная микросхема регулятора.
Итак, функциональная схема разработана на основе типовых схем, при помощи которых реализуется сигнал передачи информации по управляющему сигналу. Создание новых проектных решений связано с компоновкой стандартных элементов.
 5 Выбор типовых элементов функциональной схемы проектируемой системы
5 Выбор типовых элементов функциональной схемы проектируемой системы
Счетчики импульсов предназначены для отсчета импульсов. Их используют в различных счетных схемах, распределителях импульсов, схемах измерения и образования интервалов времени, в программных устройствах.
Состояние счетчика отображают потенциалами (или импульсами) на его выходах. Выходов у счетчика должно быть столько, сколько у него состояний. Каждое состояние одного разряда можно отображать в соответствии с двоичной системой сигналов прямым (1) или инверсным (0) сигналом, и, следовательно, состояниями прямого и инверсного выходов. Если сигнал 1 имеется на выходе 1, то счетчик находится в состоянии 1. При сигнале 1 на произвольном выходе mi счетчик находится в состоянии mi. Основой для построения счетчиков служат JK- и D-триггеры. Компаратор (нуль-индикатор) сокращенно НИ – это устройство, реагирующее на уровни сигналов [5].
НИ имеет два устойчивых состояния и может быть двухвходовым и одновходовым (второй вход объединен с землей). Одновходовой нуль-индикатор (НИ) используют для определения знака одной величины Uх; на выходе будет сигнал 1, если Ux больше нуля, и сигнал 0, если Ux≤0. Двухходовой НИ используют для сравнения двух значений. Качество НИ определяется точностью сравнения, т.е. близостью разности этих значений нулю. Если сравнить операционный усилитель и нуль-индикатор, то можно заметить в них много общего, за исключением выходного каскада.
НИ выполнен в виде простого инвертора VT. Как и в стандартных логических схемах, выходной каскад часто выполняют с активной нагрузкой. Коэффициент НИ должен быть очень большим (1000 – 10000) – таким, чтобы при небольшом разбалансе напряжений на входах выходной каскад  переходил из полностью закрытого в полностью открытое состояние или наоборот.
переходил из полностью закрытого в полностью открытое состояние или наоборот.
Стандартный операционный усилитель непосредственно не может быть использован в качестве НИ. Это связано с тем, что низкий потенциал на выходе ОУ, находящегося в «насыщенном» состоянии (при использовании ОУ в режиме переключения), составляет 0,5 – 2,0 В, в то время как для управления схемами ТТЛ (транзисторно-транзисторная логика) или КМОП (комплектарная структура металл-оксид-полупроводник) низкий уровень (сигнал 0) не должен превышать +0,4 В. С другой стороны, высокий потенциал (сигнал 1) на выходе ОУ, находящегося в закрытом состоянии, существенно превышает допустимый уровень на входах ТТЛ, который обычно не выше 3,5 В. Для сопряжения выхода ОУ со входами логических схем применяют различные схемы согласования. Практически они также должны быть выполнены в виде простейших НИ и переключаться из закрытого состояния в открытое и наоборот при переходе напряжения на выходе ОУ через среднее значение между максимальным и минимальным.
Генератор прямоугольных импульсов предназначен для формирования импульсов прямоугольной формы, которые необходимы для подачи их на цифровую часть микросхемы с целью получения сигналов прямоугольной формы разной частоты.
Принципиальная электрическая схема генератора прямоугольных импульсов приведена на рисунке 10. Данная схема питается от стабилизатора напряжения с выходным напряжением uпит = 5,7 В. Рассматриваемый генератор обеспечивает на выходе импульсы прямоугольной формы частотой f = 2 кГц и скважностью Q
2. Работа генератора основана на заряде – разряде конденсатора С1. Время заряда и разряда конденсатора, а, следовательно, время импульса и время паузы определяются величиной емкости конденсатора С1 и параметрами p-n-p- и n-p-n транзисторов (в основном внутренними сопротивлениями транзисторов).Схема генератора прямоугольных импульсов работает следующим образом. В начальный момент, когда конденсатор С1 разряжен, транзистор VT10 закрыт, то потенциал на базе транзистора VT5 определяется делителем напряжения R2, R3 и R7 и будет определяться как

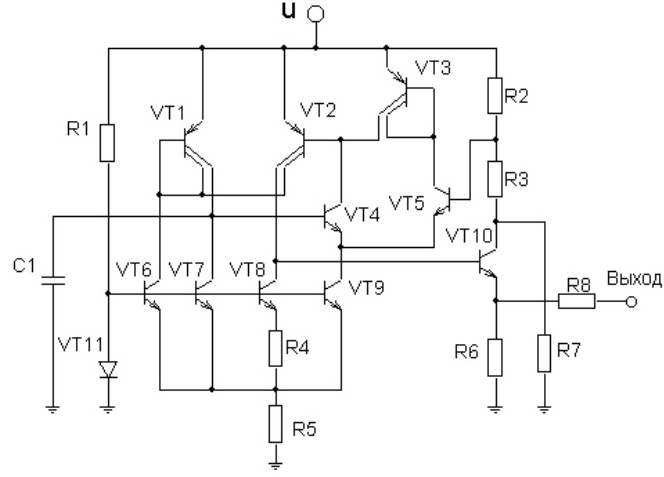
Рисунок 10 - Принципиальная электрическая схема ГПИ (генератора прямоугольных импульсов)
Принцип работы токовой системы, построенной на основе ШИМ с применением ГПИ, представляет собой нижеописанную последовательность действий:
Напряжение на выходе генератора сильно зависит от частоты вращения ротора генератора, величины тока через нагрузку и тока через обмотку возбуждения. Поэтому для регулирования и нормирования напряжения необходимо иметь эталонное напряжение, мало зависящее от всех
 возможных факторов, а именно: питающего напряжения, тока нагрузки, величины магнитного потока в обмотке возбуждения и других факторов.
возможных факторов, а именно: питающего напряжения, тока нагрузки, величины магнитного потока в обмотке возбуждения и других факторов.В проектируемой системе роль такого устройства выполняют пяти разрядный счетчик цифровых импульсов на основе Т-триггеров, управление работой которых осуществляется с помощью генератора прямоугольных импульсов (рисунок 5) и резистивной матрицы, которые в совокупности формируют спадающее пилообразное напряжение. Данное пилообразное напряжение "насаживается" на постоянную составляющую для согласования работы с компаратором напряжения. Так как перечисленные блоки питаются от стабилизатора напряжения 11, напряжение, на выходе которого практически не зависит от внешних воздействий на регулятор, то пилообразное напряжение, формируемое данными блоками можно считать эталонным [6].
В случае отклонения от номинального значения регулируемой величины необходимо произвести сравнение напряжения с эталонным напряжением uэт. Для этой цели может быть служить компаратор напряжения, на один вход которого подается эталонное напряжение с формирователя пилообразного напряжения, а на другой – напряжение с резистивного делителя напряжения, предназначенного для формирования измерительного сигнала uизм, удобного для работы компаратора напряжения и согласованного с постоянной составляющей эталонного пилообразного напряжения. Для управления регулирующим элементом имеются триггерное устройство и выходной каскад. В зависимости от результата сравнения компаратором напряжения могут быть следующие результаты:
1. Если напряжение на входе микросхемы больше номинального напряжения, то делитель напряжения формирует такой сигнал на входе компаратора, при котором на его выходе возникает уровень, закрывающий выходной транзистор. Для проверки работоспособности выходного транзистора цифровым счетчиком образуется короткий импульс, равный времени в 1,5 раза большее, чем период тактовой частоты (благодаря
 управляющему RS-триггеру). Если пренебречь этим коротким импульсом, то можно считать, что выходной транзистор будет полностью закрыт. В результате этого параметр будет стабилизироваться до тех пор, пока не достигнет нормы.
управляющему RS-триггеру). Если пренебречь этим коротким импульсом, то можно считать, что выходной транзистор будет полностью закрыт. В результате этого параметр будет стабилизироваться до тех пор, пока не достигнет нормы.2. Если напряжение на входе микросхемы будет меньше номинального, то делитель напряжения сформирует сигнал на входе компаратора, при котором на его выходе возникает уровень, полностью открывающий выходной транзистор. В результате того, что выходной транзистор будет полностью открыт, через него, а, следовательно, и через обмотку возбуждения потечет ток, практически определяемый параметрами обмотки возбуждения. Из-за протекания этого тока по обмотке возбуждения напряжение на выходе генератора начнет повышаться.
3. Если напряжение на входе микросхемы будет соответствовать номинальному, то компаратор напряжения сработает посередине периода пилообразного напряжения и на выходе компаратора будет наблюдаться сигнал частотой 1/Тпилы и со скважностью 2. Такой же сигнал будет и на выходном транзисторе. Напряжение, соответствующее данному режиму, называется напряжением настройки.
Соотношение эталонного пилообразного напряжения, напряжения на выходе резистивного делителя напряжения и напряжения на базе выходного транзистора приведены на рисунке11.
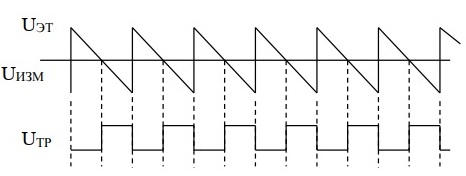
Рисунок 11 - Диаграмма, соответствующая напряжению настройки (ТКН)
4. Если напряжение на входе микросхемы будет незначительным, то компаратор сработает по "пиле" ранее или позднее ее середины, что будет соответствовать частоте на выходе компаратора и на базе выходного транзистора со скважностью меньшей 2 и большей 2, соответственно. В случае Q < 2 длительность импульса будет больше длительности паузы, то есть выходной транзистор будет больше открыт, чем в случае, соответствующем напряжению настройки на входе микросхемы.
Таким образом, ток через обмотку возбуждения будет увеличен и напряжение также увеличено. В случае Q > 2, наоборот, длительность паузы больше длительности импульса, то есть выходной транзистор будет больше закрыт, чем в случае, соответствующем напряжению настройки (Q = 2). Таким образом, ток через обмотку возбуждения будет уменьшен и напряжение также будет уменьшено.
Итак, работа этого узла основана на изменении под влиянием температуры окружающей среды напряжения постоянной составляющей пилообразного напряжения, то есть уровня эталонного напряжения. Благодаря этому напряжение настройки будет изменяться при изменении температуры окружающей среды.
 Постоянную составляющую напряжения возможно регулировать, так как она не зависит от внешних факторов, переменную составляющую задают в определенных пределах с учетом возможных колебаний.
Постоянную составляющую напряжения возможно регулировать, так как она не зависит от внешних факторов, переменную составляющую задают в определенных пределах с учетом возможных колебаний. 6 Монтажная схема проектируемой системы
6 Монтажная схема проектируемой системыМонтаж приборов и систем автоматизации представляет собой сложный комплекс работ, выполняемый в соответствии с проектом и действующими техническими условиями.
Работы по монтажу производятся в соответствии с утвержденной рабочей документацией со штампом "К производству работ", проектом производства работ (ППР) или другим, заменяющим его документом, технологическими картами, а также с технической документацией предприятий-изготовителей [7].
При производстве работ по монтажу должны соблюдаться требования СП 77.13330.2016 Системы автоматизации (Актуализированная редакция СНиП 3.05.07-85СНиП 3.05.07-85).
Производство монтажных работ связано с установкой несущих и опорных конструкций, приборов и средств автоматизации и подключенных к ним трубных и электрических проводок. Монтажные работы включают монтаж щитов и пультов контроля и управления, монтаж электропроводок, монтаж трубных проводок, монтаж датчиков, приборов, регуляторов и исполнительных механизмов.
Сдача смонтированных приборов и систем автоматизации под пусконаладочные работы производится после завершения всего комплекса монтажных работ. Порядок сдачи объекта определен строительными нормами и правилами.
Сдача проводится по сдаточной документации после индивидуального опробования, которое осуществляется при неработающем технологическом оборудовании. После окончания работ по монтажу приборов и средств автоматизации составляют акт, где перечисляют средства, предъявляемые к сдаче, результаты индивидуального опробования систем и дают оценку выполненным работам.
После сдачи монтажных работ приборы и средства автоматизации считают готовыми к пусконаладочным работам.
 Монтаж систем автоматизации включает три основных этапа:
Монтаж систем автоматизации включает три основных этапа:1) подготовка производства монтажных работ
2) производство монтажных работ;
3) сдача смонтированных систем под пусконаладочные работ.
При полносборном монтаже основные работы разделяют на:
-монтаж соединительных проводок. Трубные блоки поставляют в монтажную зону в законченном для монтажа виде с присоединительными и крепежными изделиями. Для трубных проводок систем пневмоавтоматики применяют пневмокабели (трубные кабели) или полиэтиленовые трубы взамен медных и стальных. В ряде случаев вместо защитных труб для электропроводок применяют защитные металлические короба;
-монтаж щитов и пультов в операторных помещениях. Щиты и пульты поставляют блоками с полностью выполненными внутренними трубными и электрическими проводками, с установленной аппаратурой и приборами;
-монтаж местных приборов и щитов. К монтажу соединительных проводок приступают после монтажа технологического оборудования. Монтаж щитов и пультов в щитовых помещениях начинают после окончания всех строительных и отделочных работ, выполнения проемов, каналов и установки всех закладных частей.
Монтаж местных приборов начинают после окончания строительных работ при заканчивающейся обвязке технологического оборудования, при этом должны быть выполнены все врезки отборных устройств, установлены регулирующие и запорные органы, а также приборы, монтируемые непосредственно на трубопроводах.
Окончанием работ по монтажу систем автоматизации является завершение испытаний трубных, волоконно-оптических и электрических проводок и подписание акта приемки смонтированных систем автоматизации в объеме рабочей документации.
В сдаточном акте отмечают:
-проект, по которому были выполнены монтажные работы;
-срок начала и окончания монтажа, результаты внешнего осмотра
 приборов и средств автоматизации;
приборов и средств автоматизации;-оценку работы и перечень недоделок, не препятствующих нормальной эксплуатации приборов, с указанием срока устранения указанных дефектов.
К сдаточному акту прилагают рабочие чертежи проекта с изменениями, внесенными в процессе монтажа, а также:
-перечень документов, разрешающих отступления от рабочих чертежей, ведомость смонтированных приборов и средств автоматизации с перечислением всей сдаваемой аппаратуры;
-ведомость с указанием номера позиций по проектным спецификациям, наименование типа и заводского номера приборов и аппаратуры, паспорта, инструкции, чертежи и прочую документацию заводов-изготовителей приборов и средств автоматизации, сдаваемых заказчику.
Итак, Монтажные работы делятся на три стадии:
1. Подготовка к монтажу.
2. Сборка схемы.
3. Контроль параметров собранной схемы.
Монтажные схемы - чертежи, показывающие реальное расположение компонентов как внутри, так и снаружи объекта, изображённого на схеме.
 7 Приборы и оборудование для монтажных работ
7 Приборы и оборудование для монтажных работ1. Комбинированные плоскогубцы, или пассатижи - это самая распространенная разновидность шарнирно-губцевого инструмента, которая используется для фиксации и скрепления различных предметов. Пассатижи необходимы и при работе с кабелями, при резке или пайке проводов. Качество материала, из которого сделаны плоскогубцы – это основной показатель их прочности. Плоскогубцы бывают для разных типов нагрузок и отличаются некоторыми особенностями: для электромонтажных работ с различными видами кабелей могут использоваться пассатижи с круглой или острой формой рабочей части; любые виды плоскогубцев могут иметь или не иметь режущие элементы плоскости для отсекания проволоки; специальные виды плоскогубцев могут быть предназначены как для монтажных, так и для специальных или регулировочных работ.
2. Инструмент для удаления изоляции, может иметь несколько конструктивных видов. Его выбор зависит от типа кабеля и от его площади сечения. Данные виды инструмента необходимы при решении трудоемких задач по прокладке кабеля, поскольку значительно снижают временные затраты на их выполнение.
3. Современные технологии электромонтажа обусловили появление принципиально новых инструментов, использование которых может говорить об уровне качества проведенных работ. Кроме нескольких десятков видов наборов для опрессовки кабелей, существует около ста видов отдельных инструментов для различных опрессовочных работ. 4. Набор отверток и шуруповерт будут необходимы при проведении любых электромонтажных работ, связанных с установкой распределительных коробок, счетчиков и выключателей. Весь инструмент с изолируемыми рукоятками, который используется при электромонтажных работах, относится к основным средствам защиты. В соответствии с Правилами безопасной эксплуатации электроустановок (ПБЭЭП), к такому инструменту
 и его использованию предъявляется ряд требований. Самые простые из них – это хранение инструмента для электромонтажных работ в отдельной сумке или чехле, назначение которых – защита от внешних воздействий. Кроме этого, раз в полгода инструмент проходит обязательный осмотр, цель которого – выявление механических повреждений. Раз в год инструмент с изолированными рукоятями подвергается специальным испытаниям в условиях электротехнической лаборатории, где его проверяют на устойчивость к длительному воздействию повышенным напряжением. Результаты испытаний заносятся в специальный журнал, где каждому защитному средству соответствует определённый номер, наносимый на корпус.
и его использованию предъявляется ряд требований. Самые простые из них – это хранение инструмента для электромонтажных работ в отдельной сумке или чехле, назначение которых – защита от внешних воздействий. Кроме этого, раз в полгода инструмент проходит обязательный осмотр, цель которого – выявление механических повреждений. Раз в год инструмент с изолированными рукоятями подвергается специальным испытаниям в условиях электротехнической лаборатории, где его проверяют на устойчивость к длительному воздействию повышенным напряжением. Результаты испытаний заносятся в специальный журнал, где каждому защитному средству соответствует определённый номер, наносимый на корпус.Паяльник – главный прибор. Основные критерии при выборе паяльника – это его мощность и размеры. Для пайки радиодеталей и ремонта электроприборов подходящий размер паяльника - 25 см и диаметр жала не более 4 мм. Электроизмерительный тестер (иначе мультиметр). С помощью этого прибора определяют наличие разрывов, измеряют напряжение, ток и сопротивление. Подставка под паяльник Так как главный паяльный агрегат нагревается до 300 градусов, подставка под него необходима. Канифоль и припой Припой – это сплав свинца с оловом. Канифоль – это затвердевшая смола. Ее используют для снятия оксидных пленок и обезжиривания поверхностей. Инструменты для пайки: Пинцет помогает работать с мелкими деталями, доставать что-либо из труднодоступных мест и т.п. Бокорезы. Их используют для зачистки проводов, кусают различные предметы, которые мягче железа. Напильник необходим для спиливания жала паяльника. Набор отверток. Используется для механического закрепления деталей винтами [8].
Итак, дополнительные инструменты могут потребоваться в зависимости от сложности монтажа и выполненных подготовительных работ.
 8 Наладка регулятора. Виды неисправностей и их устранение
8 Наладка регулятора. Виды неисправностей и их устранениеНаладочные работы - это сложная совокупность операций, по проверке, регулировке, отладке, подготовке, включению и обеспечению нормальной работы систем управления технологическими процессами в заданных условиях.
Выделяют два этапа проведения пусконаладочных работ.
Первый этап подготовительный. Все работы ведутся на неработающем технологическом оборудовании. При этом решаются следующие задачи: подготовка лаборатории, рассмотрение рабочих чертежей проекта, проверка правильности и качества монтажа цепей, предмонтажная проверка приборов и средств автоматизации, опробование и настройка элементов систем автоматизации после монтажа. Проводится инструктаж персонала пусконаладочной организации по технике безопасности и правилам работы на действующем предприятии. Все переключения режимов работы технологического оборудования проводятся заказчиком. Включение и выключение систем автоматизации фиксируется в оперативном журнале.
Второй этап заключительный, предусматривает наладку систем контроля и автоматического управления, которая производится на технологический режим.
Пусконаладочные работы на системах автоматизации выполняют в соответствии с ГОСТ 34.201 и эксплуатационной документацией предприятий - изготовителей технических средств автоматизации.
Отказ – событие, заключающееся в полной или частичной утрате изделием работоспособности. Состояние работоспособности регулятора характеризуется двумя составляющими: функционированием и ожиданием. Отказы в работе систем автоматики подразделяются на постепенные и внезапные. Постепенные отказы связаны с изнашивание, внезапные отказы характеризуются резким изменением технических характеристик компонентов системы.
 Существуют пять типов отказов [9]:
Существуют пять типов отказов [9]:1. Конструкторские отказы – связаны с конструкторскими недоработками.
2. Схемные отказы – неправильный выбор основных технических параметров.
3. Отказы деталей – бывают из-за низкой надежности деталей или неправильных режимов их использования.
4. Технологические отказы – из-за несовершенства технологического процесса сборки, монтажа и регулировки в условиях испытаний.
5. Эксплуатационные отказы связаны с неправильным выбором типа регулятора, отклонений по монтажу и эксплуатации, недостаточной квалификацией персонала.
Возможные неисправности в схеме можно контролировать тестером или прозвонкой. Часто встречающиеся неисправности электрических и электронных схем:
1. Непропаянные участки. Повторно осуществить пайку.
2. Неисправный элемент. Выпаять из схемы и заменить его исправной деталью.
3. Неисправная проводка. Также заменяют неисправный участок.
4. Некачественная изоляция. Заменить неисправный участок изоляции.
Итак, для предотвращения отказов компонентов системы передачи информации необходимо осуществлять своевременное техническое обслуживание.
9 Расчетная часть
Произведем расчет электродвигателя, который управляется проектируемой системой.
Найдем главные размеры асинхронного двигателя [10]
Число пар полюсов
 (1)
(1)где
 - частота сети, Гц;
- частота сети, Гц; - синхронная частота вращения (по ГОСТ 10683), об/мин.
- синхронная частота вращения (по ГОСТ 10683), об/мин.
Высота оси вращения. С учетом номинальной отдаваемой мощности (по ГОСТ 12139-84) 1,5 кВт и синхронной частоте вращения 876 об/мин. выбираем h=90 мм для мощности в 1,5 кВт и частотой вращения 1000 об/мин.
Диаметр сердечника выбираем в соответствие с h=90 мм получаем значение
 ,
,  ,
,  ,
,  , ширина резаных лент 163 мм.
, ширина резаных лент 163 мм.Внутренний диаметр сердечника статора при 2р=4 и
 (2)
(2)
Находим значение
 по рисунку А1.
по рисунку А1.  при 2р=4 и мощности 1,5 кВт.
при 2р=4 и мощности 1,5 кВт. Находим значение
Находим значение  по рисунку А2.
по рисунку А2.  при 2р=4 и мощности 1,5 кВт.
при 2р=4 и мощности 1,5 кВт.Находим значение
 по рисунку А3.
по рисунку А3.  при 2р=4 и мощности 1,5 кВт.
при 2р=4 и мощности 1,5 кВт.Расчетная мощность
 (3)
(3)
Определим
 по рисунку А4.
по рисунку А4.  при
при 
Определяем
 по рисунку А5.
по рисунку А5.  при
при Обмоточный коэффициент
 при 2р=4.
при 2р=4.Расчетная длина сердечника
 (4)
(4)
Длина сердечника статора
 ,
,  .
.Определяем

 (5)
(5)
 Определяем
Определяем  для 2р=4.
для 2р=4.
Марка стали 2013 для высоты оси вращения h=90 мм. Толщина стали 0,5 мм. Коэффициент заполнения для стали 2013
 Количество пазов на полюс 2, на фазу
Количество пазов на полюс 2, на фазу  3 при h=90 мм и 2р=4.
3 при h=90 мм и 2р=4.Количество пазов сердечника статора
 (6)
(6)где
 - количество фаз статора.
- количество фаз статора.
Определим параметры ротора
Марка стали 2013 для высоты оси вращения h=90 мм. Толщина стали 0,5 мм. Коэффициент заполнения для стали 2013
Скос пазов
 Воздушный зазор между статором и ротором по
Воздушный зазор между статором и ротором по  при h=90 мм и 2р=4.
при h=90 мм и 2р=4.Наружный диаметр сердечника ротора
 (7)
(7)
Внутренний диаметр листов ротора
 (8)
(8)
 не требуется, так как h=90 мм,
не требуется, так как h=90 мм,  не требуется, так как h=90 мм.
не требуется, так как h=90 мм. Длина сердечника ротора
Длина сердечника ротора  , так как h=90 мм.
, так как h=90 мм.Количество пазов в сердечнике ротора
 . При h=90 мм и 2р=4
. При h=90 мм и 2р=4
Рассчитаем обмотку статора
Коэффициент распределения
 (9)
(9)где
 - угол между фазами, град.
- угол между фазами, град.Угол между фазами
 (10)
(10)
 Укорочение шага
Укорочение шага  при однослойной обмотке.
при однослойной обмотке.Диаметральный шаг по пазам
 (11)
(11)
Коэффициент укорочения
 (12)
(12)
Обмоточный коэффициент
 (13)
(13)
Предварительное значение магнитного потока
 (13)
(13)
 Предварительное количество витков в обмотке фазы
Предварительное количество витков в обмотке фазы (14)
(14)где
 - фазное напряжение, В.
- фазное напряжение, В.
Количество параллельных ветвей принимаем равным
 при 2р=4
при 2р=4 Предварительное количество эффективных проводников в пазу
 (15)
(15)
Уточненное количество витков в обмотке фазы
 (16)
(16)
 Уточненное значение магнитного потока
Уточненное значение магнитного потока
Уточненное значение индукции в воздушном зазоре

Предварительное значение номинального фазного тока

Уточненная линейная нагрузка статора

Среднее значение магнитной индукции в спинке статора
 при h=90 мм и 2р=4.
при h=90 мм и 2р=4.Зубцовое деление по внутреннему диаметру статора

Выбор автоматических выключателей
 (17)
(17) (18)
(18) (19)
(19)
где
 - номинальный ток автоматического выключателя, А;
- номинальный ток автоматического выключателя, А; - номинальный ток асинхронного двигателя, А;
- номинальный ток асинхронного двигателя, А; - номинальный ток расцепителя, А;
- номинальный ток расцепителя, А; - ток срабатывания электромагнитного расцепителя, А;
- ток срабатывания электромагнитного расцепителя, А; - пусковой ток электродвигателя, А.
- пусковой ток электродвигателя, А.Пусковой ток электродвигателя
 (20)
(20)
Выбираем автоматический выключатель ABB Выключатель автоматический модульный 3п C 10А 6кА SH203 ABB 2CDS213001R0104 [8].
Номинальный ток теплового реле
 (21)
(21)
Выбираем тепловое реле РТЛ-1010-2-25А (4-6А)-УХЛ4-КЭА3 [9].
Номинальный ток 25 А, диапазон реле тока 4-6 А. Количество полюсов: 3. Количество вспомогательных размыкающих контактов: 1.
 Количество вспомогательных замыкающих контактов: 1. Мощность двигателя AC2/AC3 V=380 AC (кВт): 2,2 кВт.
Количество вспомогательных замыкающих контактов: 1. Мощность двигателя AC2/AC3 V=380 AC (кВт): 2,2 кВт.Магнитный пускатель
 (22)
(22) (23)
(23)Выбираем ПМЛ-1222-УХЛ4. Номинальный ток 25 А, нереверсивный пускатель е тепловым реле, степень защиты IP54 с кнопками «ПУСК» и «СТОП» [11].
Плавкие предохранители
 (24)
(24) (25)
(25) (26)
(26) (27)
(27)где
 - коэффициент, зависящий от частоты включений и условий пуска.
- коэффициент, зависящий от частоты включений и условий пуска.
Выбираем предохранитель ПН2-100 УХЛ4, ток плавкой вставки 16 А.
Итак, определены параметры двигателя и элементов схемы.
Выводы
 В данной курсовой работе спроектирована токовая система передачи информации на основе управляющего сигнала.
В данной курсовой работе спроектирована токовая система передачи информации на основе управляющего сигнала.Спроектирована схема САУ, представлено обоснование такого варианта.
Указан принцип действия и назначение основных компонентов проектируемой схемы.
Далее были описаны все элементы схемы, их функциональные возможности с учетом эксплуатационных условий.
Следующим этапом была разработана функциональная схема на основе существующих проектных решений, выбраны основные элементы функциональной схемы.
Даны пояснения по монтажным работам – объем работ, подготовка, составление схемы.
Приведен перечень основных и дополнительных приборов, необходимых для выполнения монтажных работ.
Перечислен порядок пуско-наладочных работ, требования, которые позволят увеличить срок службы и не ухудшать эксплуатационные характеристики.
Устройство представляет собой микроконтроллер, который может быть внедрен для управления асинхронными двигателями.
Разработана система управления, которая является одним из основных микропроцессорных блоков.
Сконструированы структурные, функциональные и принципиальные схемы как отдельных блоков, так и всей токовой системы.
Указана параметры устройства без привязки к определенному типу, что доказывает универсальность устройства.
Быстродействие – время выполнения команд не более 0,5 с. Потребляемая мощность не более 15-20 Вт.
Список использованной литературы
1. Борисенко, В.Е. Наноэлектроника. Теория и практика [Текст] / В.Е. Борисенко. – М.: Бином, 2015. – 366 c.
2. Бутырин. П.А. Электротехника и электроника [Текст] / П.А. Бутырин. – М.: Academia, 2018. – 892 c.
3. Даньков, В.В. Теория автоматического управления [Текст] / В.В. Даньков, М.М. Скрипниченко, Н.Н. Горбачёва. - СПб.: Лань, 2016. – 608 c.
4. Иньков, Ю.М. Электротехника и электроника [Текст] / Ю.М. Иньков. – М.: Academia, 2019. – 126 c.
5. Ким, Д.П. Теория автоматического управления [Текст] / Д.П. Ким. - Люберцы: Юрайт, 2016. - 276 c.
6. Коновалов, Б.И. Теория автоматического управления [Текст] / Б.И. Коновалов, Ю.М. Лебедев. - СПб.: Лань, 2020. - 224 c.
7. Корнеев, Н.В. Теория автоматического управления [Текст] / Н.В. Корнеев. - М.: Academia, 2017. - 394 c.
8. Котельников В.А. Собрание трудов. Основы радиотехники. Том 4 [Текст] / В.А. Котельников – М.: Физматлит, 2015. – 368 c.
9. Мощенский Ю.В. Теоретические основы радиотехники. Сигналы [Текст] / Ю.В. Мощенский. – СПб.: Лань, 2018. – 216 c.
10. Шишмарёв, В.Ю. Теория автоматического управления [Текст] / В.Ю. Шишмарёв. - М.: Академия, 2017. - 202 c.
Приложение 1
Приложение 2
Приложение 3
Приложение 4