Файл: Чиетчуа Такам Кристиан Исмаель, магистрант Безмен Пётр Анатольевич.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.05.2024
Просмотров: 10
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Чиетчуа Такам Кристиан Исмаель, магистрант
Безмен Пётр Анатольевич, к.т.н., доцент
Россия, г. Курск, Юго–Западный государственный университет
christiantakamismael@gmail.com, pbezmen@yahoo.com
РАЗРАБОТКА И СОЗДАНИЕ МАНИПУЛЯТОРА ТИПА PUMA 560 С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ
В данной статье описывается система управления манипулятором типа PUMA 560 с 4 степенями свободы, задачей которого является перемещение объектов с помощью присоски, которая под отрицательным давлением, создаваемым вакуумным насосом, позволит конечному устройству выполнить эту операцию. Чтобы сделать управление роботом возможным, решение, предложенное в данном исследовании, заключается в использовании соединительной платы типа Arduino UNO или Mega, которая является отличным интерпретатором языка программирования.
Ключевые слова: электроника, манипулятор, схема, питание, программирование, микроконтроллер, сервомотор.
Манипулятор PUMA 560 с 4 степенями свободы — это робот с 4 оборотами суставов. Система этого робота состоит из двух частей:
-
Механическая структура, которая имеет дело с различными связями и сочленениями от основания до конечного органа. -
Электронная структура, которая занимается управлением сочленениями и оконечным органом робота, и его перемещением в рабочем пространстве.
Рука манипулятора является механическим компонентом системы и имеет 4 оси вращения, каждая из которых управляется серводвигателем постоянного тока.
Сервомотор — это моторизованная система, способная достигать и поддерживать заданные положения. В случае с роботом PUMA он способен достигать позиций.
Все части руки манипулятора соединены друг с другом с помощью шарниров. Первое сочленение обеспечивается сервомотором типа HS-805BB, который может развивать крутящий момент от 19,8 до 24,7 кг/см, это сочленение заставляет всю конструкцию вращаться вокруг вертикальной оси, второе сочленение обеспечивается вторым сервомотором (HS-475HB), установленным вертикально и обеспечивающим первое вращение вокруг горизонтальной оси, за которым следует второе сочленение с помощью третьего сервомотора (HS-HS422) вокруг горизонтальной оси, параллельной первой оси. Для того чтобы концевой элемент всегда был ориентирован в вертикальном направлении, к концу второго рычага прикреплен четвертый сервомотор. Как показано на рисунках ниже, терминал был разработан для выполнения как минимум двух функций:
 Писать на горизонтальной поверхности и использование присоски для поднятия предмета из одной точки в другую.
Писать на горизонтальной поверхности и использование присоски для поднятия предмета из одной точки в другую.Сервомотор3
воздушный канал
Сервомотор2
Пружина
Сервомотор1 Присоска
Плата питания
Arduino UNO
Рисунок 1 – Структурная схема манипулятора с 4 степенями свободы
На рисунке 2 ниже показан вид сбоку манипулятора PUMA, который подчеркивает функцию присоски в рабочем пространстве.

Рисунок 2 – Выделение функции присоски манипулятора
Электронная часть манипулятора состоит из платы питания, платы Arduino UNO или Mega и одножильных и USB проводов.
В конструкцию силовой платы встроен микропроцессор, который управляет электрическими силовыми ораганами (4 серводвигателя суставов робота). Эта плата имеет H-мост и все необходимые соединения, позволяющие подключить ее непосредственно к плате Arduino UNO или Mega.
М
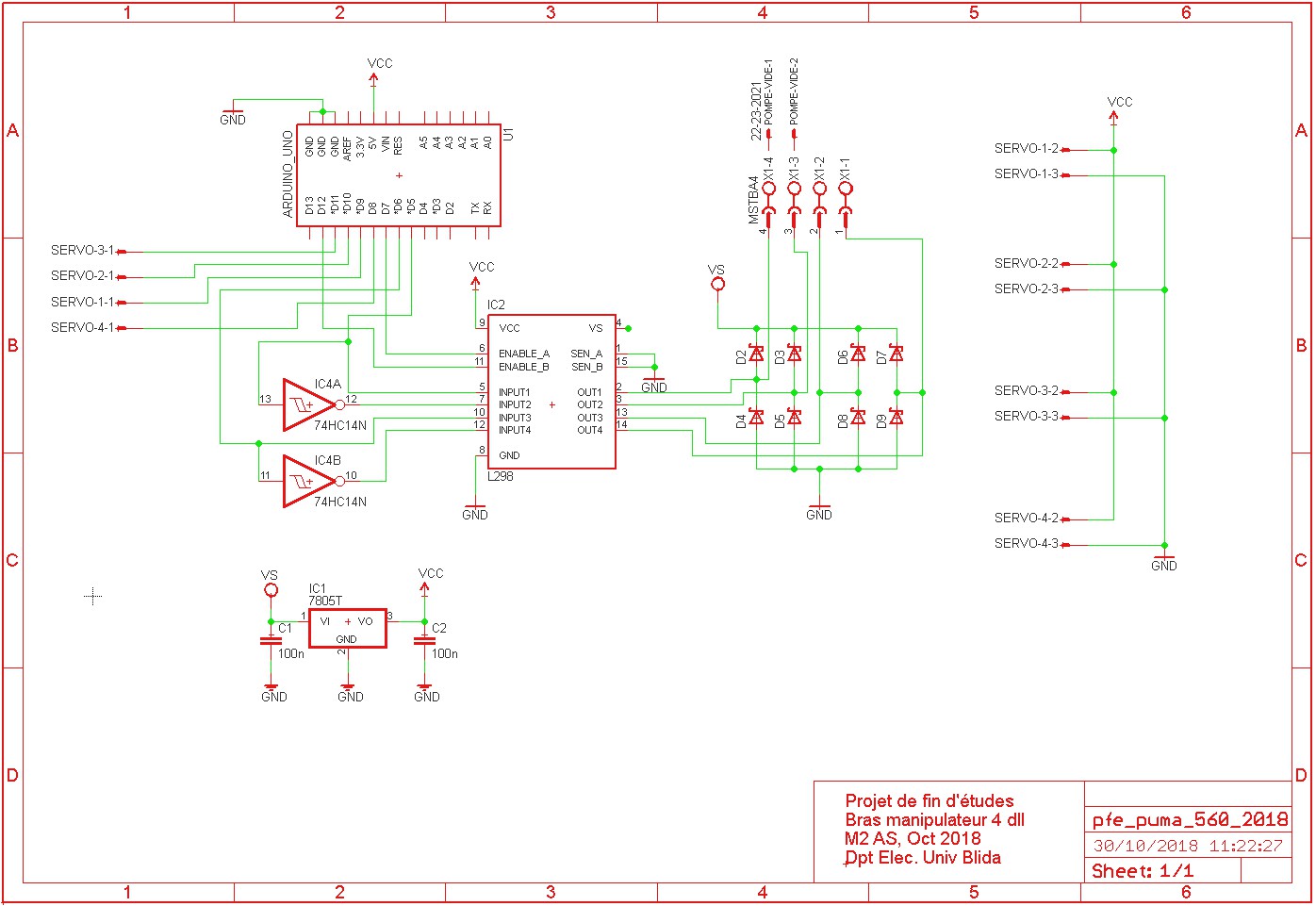 одуль Arduino имеет четыре штыревых разъема, специально предназначенных для подключения сервомоторов. Один из двух выходов Н-моста используется для питания вакуумного насоса, который находится на конце руки. На рисунке 3 ниже показана электрическая схема системы.
одуль Arduino имеет четыре штыревых разъема, специально предназначенных для подключения сервомоторов. Один из двух выходов Н-моста используется для питания вакуумного насоса, который находится на конце руки. На рисунке 3 ниже показана электрическая схема системы.Рисунок 3 – Электрическая схема силовой платы
В общем, термин сервомеханизм относится к системе, которая включает в себя все необходимые элементы для создания желаемой реакции на внешнюю команду. Серводвигатель состоит из двигателя постоянного тока и всей электроники Серводвигатель состоит из двигателя постоянного тока и всей электроники, которая обеспечивает замкнутый контур для адекватного управления углом поворота вала двигателя, На рисунке 4 показан принцип работы.


| | процессор | | ступень питания |
| | |
входной сигнал
 Двигатель коробка передач
Двигатель коробка передачVcc us
Рисунок 4 – Принцип работы сервомотора
Управляющий сигнал подается в виде импульсов переменной ширины, соответствующих желаемому углу поворота. Для поддержания заданного положения сигнал должен быть периодическим с частотой от 50 до 100 Гц. Максимальное значение угла поворота может варьироваться в зависимости от модели, но обычно находится в пределах +/- 90°, на рисунке 5 приведены примеры сигналов для 3 положений оси вращения.

 0° 0° 0°
0° 0° 0°
-90°
-90°
90°


 1 ms 1.5 ms 2 ms
1 ms 1.5 ms 2 ms 20 ms
20 ms
20 ms
Рисунок 4 – Сигналы и положения сервомотора

Рисунок 4 – Серводвигатели, используемые в манипуляторе
После завершения механической и электронной частей вся система должна быть приведена в действие таким образом, чтобы конечное устройство достигло желаемого положения. Для этого необходимо владение понятиями математического и физического расчета в робототехнике для создания адекватной обратной кинематической модели исследуемой руки-манипулятора. Прямая и обратная кинематические модели определяются в соответствии с диаграммой на рисунке 5.

Совместные переменные Прямая кинематика Отношение терминальный
(углы θ, расстояния d) Обратная кинематика орган (X,Y,Z)
Рисунок 5 – Прямая и обратная кинематика
Для того чтобы заставить реального робота выполнять движения, алгоритм, выполняющий обратную кинематику, должен быть реализован на модуле Arduino, эта программа получает координаты (x, y, z) от команды в среде Matlab, Эта команда затем декодируется и используется в качестве входных данных для программы, выполняющей расчеты обратной кинематики, в результате чего ширина импульсов, управляющих каждым из четырех серводвигателей, позволяет получить необходимые углы (θ
1, θ2, θ3, θ4), соответствующие желаемым координатам (x, y, z). Рисунок 6 иллюстрирует принцип работы системы.
Matlab
(x, y, z, 0/1) ПК
usb
Рисунок 5 – Принцип работы манипулятора
Приведенная выше блок-схема объясняет общую связь между ПК и платой Arduino, управляющей шарнирами руки. Из среды Matlab пользователь посылает через последовательный порт кадр данных, содержащий желаемые координаты (x, y, z), а также состояние всасывающего насоса; четвертый параметр - двоичная переменная, позволяющая включить насос, если эта переменная установлена в 1, и выключить, если она установлена в 0.
С технической стороны, чтобы переместить объект из точки P1 с координатами (X1, Y1, Z1) в точку P2 с координатами (X2, Y2, Z2) с помощью руки манипулятора, необходимо отправить все шаги, которые должен выполнить робот, из скрипта Matlab в следующем формате:
>> fprintf ("PortSérie",’ xyz 0/1 ’)
Приэтом для лучшего отслеживания траектории важно соединить набор точек, описывающих отрезки прямых линий вдоль этой траектории, не забыв выполнить хорошую калибровку сервомоторов манипулятора.
Список литературы
[1] Robotics. Aspects fondamentaux, J.-P. Lallemand, S. Zeghloul, Masson1994, 312 pages. [2] Jean-Louis Boimond " ROBOTICS ", ISTIA, Université Angers.
[3] Jacques Gangloff " Cours de Robotique ".
[4] Notes of course controls of Robots of Handling /master2/automatic and systems/year 2017/2018, University of Blida, Mr Kazed Boualem.
Веб-сайты
[5]Http://edusol.education.fr/sti/sites/edusol.educatin.fr.sti/files/ressources/techniques/5875/5875-industrial-robotics-eduscol-2015_0.pdf, 2015, date accessed, November 2022
[6]Https://www.ensta-bretage.fr/jaulin/mastersds_cours_robot_boimond.pdf,
[7]Https://www.google.fr/webhp?source=search_app&gfe_rd=cr&ei=lzlQWOqWIYv_8AeH9 o_IDg&gws_rd=ssl#q=%C3%A9tymologie+du+mot+robotique
Tcheutchoua Takam Christian Ismael, master's student
Bezmen Petr Anatolievich, Ph.D., Associate Professor
Russia, Kursk, Southwestern State University
christiantakamismael@gmail.com, pbezmen@yahoo.com
DESIGN AND DEVELOPMENT OF A PUMA 560 MANIPULATOR WITH FOUR DEGREES OF FREEDOM
Annotation: In This article describes the control system of a manipulator arm type PUMA560 with 4 degrees of freedom, whose task is to move objects using a suction cup that, under a negative pressure exerted by a vacuum pump, will allow the terminal organ to perform this operation.
To make possible the control of the robot, the solution proposed in this study is to use a linkage board type Arduino UNO or Mega which is an excellent interpreter of programming language.
Keyword: Electronic, manipulator, circuit, power, programming, microcontroller, servomotor.

