Файл: Контрольная работа по курсу "Электромеханические устройства автоматики" студент группы Проверил.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.05.2024
Просмотров: 8
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ Российской Федерации
Федеральное государственное бюджетное
образовательное учреждение высшего образования
Контрольная работа
по курсу
"Электромеханические устройства автоматики"
Выполнил: студент группы
Проверил
_________________/
Задание
2.1 Составить схемы включения универсальных асинхронных микродвигателей в
питающую сеть. Указать достоинства и недостатки универсальных двигателей.
2.2 Привести схемы включения, перечислить способы управления, показать вид
механических и регулировочных характеристик однофазных асинхронных исполнительных
двигателей.
2.3 Объяснить, что такое самоход асинхронных исполнительных двигателей. Указать
возможные причины и виды самохода, привести способы борьбы с самоходом.
2.4 Перечислить способы управления и привести схемы включения исполнительных
двигателей постоянного тока. Показать вид механических и регулировочных характеристик
этих двигателей.
2.5 Указать какие режимы работы сельсинов применяются, когда применяется тот или иной
режим. Привести схемы индикаторной и трансформаторной систем синхронной связи.
Заключение
Список литературы
2.1 Составить схемы включения универсальных асинхронных микродвигателей в
питающую сеть. Указать достоинства и недостатки универсальных двигателей.
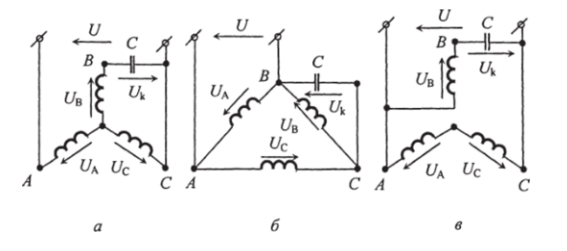
Асинхронные двигатели, рассчитанные для работы от сети как трёхфазного, так и однофазного тока, называются универсальными асинхронными двигателями (УАД). Универсальные двигатели изготовляются как трехфазные, но их обмоточные данные рассчитываются так, чтобы при определённой схеме включения обмоток статора с использованием конденсатора обеспечивались приемлемые характеристики и при работе от однофазной сети. Номинальная мощность УАД при однофазном питании составляет 70-85% от номинальной мощности трехфазного двигателя.
Наиболее распространенные схемы включения обмоток статора трехфазных двигателей в
однофазную сеть показаны на рисунке, а, б, в.
Преимущества асинхронного двигателя
Конструкция.
По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию.
Подключение.
Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на
120°, для формирования вращающегося поля не нужны дополнительные элементы и
преобразования.
Недостатки асинхронных двигателей
Скорость вращения ротора зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток
статора.
Это можно не считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток.
Скольжение.
Эффект скольжения проявляется в том, что частота вращения ротора всегда будет
меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
Чувствительность к напряжению питания.
При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться.
Кроме того, при понижении напряжения падает момент электродвигателя, который
зависит от напряжения.
Пусковой ток.
Большой пусковой ток – проблема асинхронных двигателей мощностью более 10
кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нельзя подключать напрямую.
Пусковой момент.

В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового
момента привод может не справиться с началом вращения тяжелых механизмов. Этот же
недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема –
ограничение количества пусков в единицу времени.
2.2 Привести схемы включения, перечислить способы управления, показать вид
механических и регулировочных
характеристик однофазных асинхронных исполнительных двигателей.
Асинхронные исполнительные двигатели изготавливают на номинальную мощность от долей до нескольких сотен ватт и предназначают для питания от источников переменного напряжения с частотой 50 Гц, а также повышенных частот до 1000 Гц и выше.
Асинхронные двигатели используют в системах автоматического управления для
управления и регулирования различных устройств.
Асинхронные двигатели начинают действовать при подаче на них электрического
сигнала, который они преобразуют в заданный угол поворота ротора или в его вращение.
Работа таких двигателей протекает все время в условиях переходных режимов, в результате чего скорость ротора зачастую при кратковременном сигнале не достигает установившегося значения. Этому способствуют также частые пуски, изменения направления вращения и остановки..
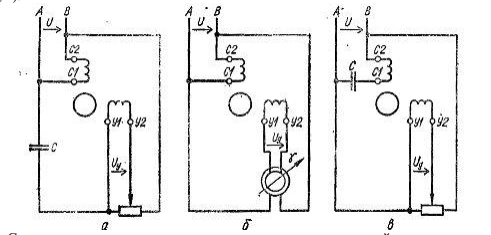
Рис. 1. Схемы включения асинхронных исполнительных двигателей при управлении: а -
амплитудном, б - фазовом, в - амплитудно-фазовом.
В результате этого в обеих фазах обмотки статора возникают соответствующие токи, которые благодаря включенным фазосдвигающим элементам в виде конденсаторов или фазорегулятора сдвинуты относительно друг друга во времени, что приводит к возбуждению эллиптического вращающего магнитного поля, которое вовлекает короткозамкнутый ротор во вращение.
При амплитудном управлении напряжение U на зажимах обмотки возбуждения поддерживают неизменным, а изменяют только амплитуду напряжения Uy. Сдвиг фаз между этими напряжениями, благодаря конденсатору, равен 90° (рис. 1, а).
Фазовое управление характерно тем, что напряжения U и Uy остаются неизменными, а сдвиг фаз между ними регулируют поворотом ротора фазорегулятора (рис. 1, б).
При амплитудно-фазовом управлении регулируют только амплитуду напряжения Uy, но при этом, из-за наличия конденсатора в цепи возбуждения и электромагнитного взаимодействия фаз обмотки статора, происходит одновременное изменение фазы напряжения на зажимах обмотки возбуждения и сдвига фаз между этим напряжением и напряжением на зажимах обмотки управления (рис. 1, в).
Иногда кроме конденсатора в цепи обмотки возбуждения предусматривают еще конденсатор в цепи обмотки управления, что компенсирует реактивную намагничивающую мощность, снижает потери энергии и улучшает, механические характеристики асинхронного
двигателя.
При амплитудном управлении круговое вращающееся магнитное поле наблюдается при
номинальном сигнале независимо от скорости ротора, а при уменьшении его оно становится
эллиптическим.
В случае фазового управления круговое вращающееся магнитное поле
возбуждается только при номинальном сигнале и сдвиге фаз между напряжениями U и Uy равным 90° независимо от скорости ротора, а при ином сдвиге фаз оно становится эллиптическим.
2.3 Объяснить, что такое самоход асинхронных исполнительных двигателей. Указать
возможные причины и виды самохода, привести способы борьбы с самоходом.
На практике встречаются два вида самоходов: принципиальный и параметрический самоход, причиной которого является неправильный расчет при проектировании двигателя, и технологический самоход, появляющийся вследствие некачественного изготовления двигателя. Двигатель имеет самоход, если его ротор вращается при отсутствии сигнала управления (
αe=0,sinβ=0, α=0).
Параметрический самоход обычно проявляется при снятии сигнала управления у двигателя, работающего с малым моментом сопротивления на валу. Причина этого — недостаточно большое активное сопротивление ротора
Для устранения самохода асинхронные исполнительные двигатели выполняются с повышенным активным сопротивлением ротора r2. Увеличение активного сопротивления ротора смещает максимум механической характеристики sкр в сторону меньших, а затем и отрицательных частот вращения (скольжений). В связи с этим результирующий вращающий момент М=Мпр+Мобр уменьшится, а при sкр≥1 станет даже отрицательным. Если в качестве исполнительного двигателя использовать двигатели с небольшим активным сопротивлением ротора (рис. 4.3, а: sкр=0,2; б: sкр=0,6), то после снятия сигнала управления, когда магнитное поле в двигателе станет пульсирующим, результирующий момент М остается положительным, и ротор продолжает вращаться в том же направлении.
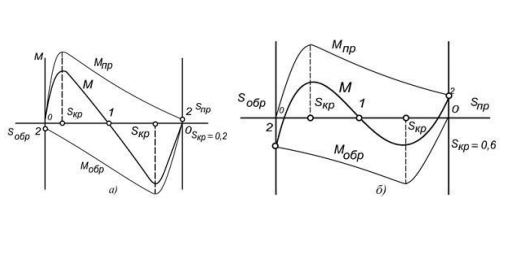
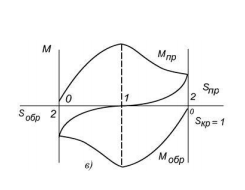
Рис 4.3 К вопросу о самоходе
Технологический самоход проявляется сразу после включения в сеть обмотки возбуждения, когда сигнал управления еще не подан.
Причина технологического самохода — возникновение слабого эллиптического поля за счет некачественного изготовления двигателя, за счет наличия:
-
замыканий между листами стали пакета статора; -
короткозамкнутых витков в обмотке; -
неодинаковой магнитной проводимости машины в
различных радиальных направлениях; -
неравностенных полых роторов и т. п.