Файл: Контрольная работа по курсу "Электромеханические устройства автоматики" студент группы Проверил.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.05.2024
Просмотров: 7
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Для устранения технологического самохода необходимо качественное изготовление двигателей:
-
тщательная изоляция обмоток; -
листов стали; -
сборка пакетов стали веером и т. п.
К асинхронным исполнительным двигателям предъявляют специфические требования в части отсутствия самохода, обеспечения широкого диапазона регулирования скорости ротора, быстродействия, большого начального пускового момента и малой мощности управления при относительном сохранении линейности их характеристик.
Первый устраним при проектировании двигателей, предусматривающем изготовление ротора с повышенным сопротивлением обмотки и критическим скольжением sкр = 2 - 4, что, кроме того, обеспечивает широкий устойчивый диапазон регулирования скорости ротора, а второй —качественным изготовлением магнитопроводов и обмоток машин при тщательной их сборке.
2.4 Перечислить способы управления и привести схемы включения исполнительных
двигателей постоянного тока. Показать вид механических и регулировочных
характеристик этих двигателей.
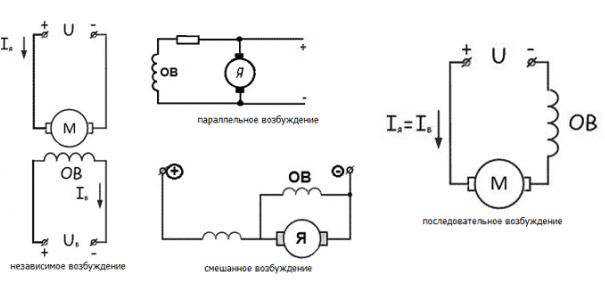
Управление
Если изменить полярность напряжения, то направление вращения якоря
также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с
отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
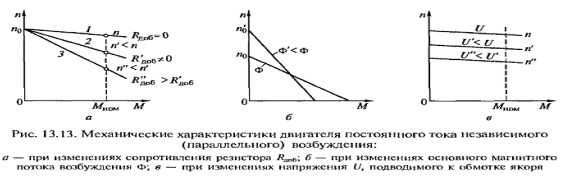
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя. Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например, переменным сопротивлением, можно регулировать параметры работы электродвигателя.

Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
-
бытовые и промышленные электроинструменты; -
автомобилестроение – стеклоподъёмники; -
вентиляторы и другая автоматика; -
трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик:
К достоинствам относится:
-
линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление; -
легко регулируемая частота вращения; -
хорошие пусковые характеристики; -
компактные размеры;
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
-
ограниченный ресурс коллектора и щёток; -
возникает необходимость
выпрямления тока; -
высокая цена в изготовлении комплектующих элементов:

2.5 Указать какие режимы работы сельсинов применяются, когда применяется тот
или иной режим. Привести схемы индикаторной и трансформаторной систем
синхронной связи.
Сельсины представляют собой особый вид электрических машин переменного тока мощностью от нескольких ватт до нескольких сот ватт (менее киловатта). Служит сельсин для дистанционной
передачи механического угла поворота электрическим путем между устройствами, не имеющими между собой механической связи. Сельсин имеет статор и ротор, на которых расположены обмотки переменного тока.
Существуют сельсины с однокатушечной обмоткой на статоре и трехкатушечной на роторе. С трехкатушечной обмоткой на статоре и однокатушечной на роторе. С
трехкатушечной обмоткой на статоре и с трехкатушечной обмоткой на роторе.
По своему назначению в схемах авторегулирования сельсины делятся на:
сельсин-датчики;
сельсин-приемники;
дифференциальные:
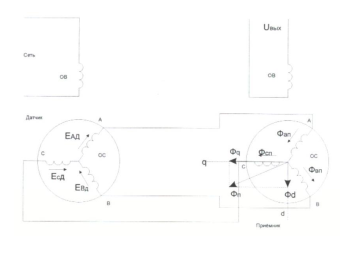
Схема индикаторной связи приведена на рис. 5.4. Будем считать, что оба сельсина совершенно одинаковы и от одного датчика питается только один приемник.

Простейшая трансформаторная система синхронной связи состоит из двух сельсинов – приёмника и датчика (рис. 5). Однофазная обмотка возбуждения сельсина датчика подключается к сети переменного тока. Ток этой обмотки наводит ЭДС в фазах датчика по аналогии (2). Величина которых зависит от расположения фаз обмотки синхронизации относительно обмотки возбуждения Под действием ЭДС в соединённых между собой фаз обмоток синхронизации СД и
СП возникают токи, величина которых зависит от величины ЭДС.
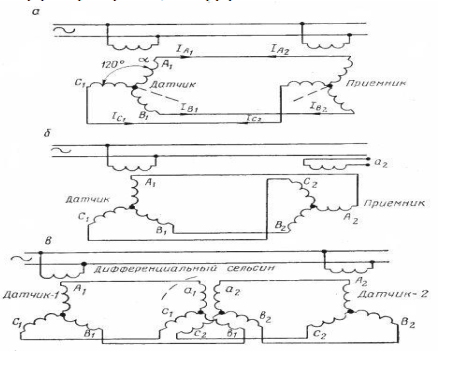
Схемы включения сельсинов: а - по системе датчик - приемник; б - сельсин-приемник в трансформаторном режиме; в – дифференциального сельсин-датчик и сельсин-приемник своими однокатушечными обмотками статора подключены к
одной и той же сети переменного тока, а трехкатушечные обмотки ротора соединены между собой.
Заключение
В ходе написания контрольной работы мы усвоили знания о электромеханических устройствах. Научились составлять схемы включения универсальных двигателей переменного и постоянного тока. Перечислили преимущество и недостатки асинхронных универсальных двигателей, сельсин датчиков и приемников, универсальных двигателей коллекторного типа. Усвоили применение частотных преобразователей и других устройств пуска универсальных асинхронных двигателей. Усвоили термин понятия как самоход, его причины и методы устранения.
Список литературы
1. Специальные электрические машины: (Источники и преобразователи энергии). Учеб. пособие
для вузов/ А.И.Бертинов, Д.А.Бут, С.Р.Мизюрин и др.; Под ред. А.И.Бертинова. – М., Энергоиздат,
1982.
2. Д.Э.Брускин, И.М.Синдеев. Электроснабжение летательных аппаратов: Учеб. для энергет. и
авиац. спец. вузов. – М.: Высш. шк., 1988.
3. А.В.Вакуров, В.А.Осадчий, А.И.Шевченко. Авиационное оборудование: Учеб для инж. вузов ВВС/
Под ред. Е.А.Румянцева. – Изд. ВВИА им. проф.Н.Е.Жуковского, 1982.
4. М.М.Кацман, Ф.М.Юферов. Электрические машины автоматических систем: Учебник для
техникумов /Под ред. Ф.М.Юферова. – 2-е изд., перераб. и доп.-М.: Высш. школа, 1979.
5. В.Т.Бородин, Г.И.Рыльский. Пилотажные комплексы и системы управления самолетов и
вертолетов. М., «Машиностроение», 1978.
6. А.Е.Аверкин, А.Е.Акиндеев, В.Д.Константинов, Г.А.Муратов. Авиационное оборудование и его
эксплуатация: Учеб. пос. /Под ред. В.Д.Константинова. - Изд. ВВИА им. проф.Н.Е.Жуковского, 1973.
7. Н.М.Богданченко, Г.Ю.Волошин, В.С.Белых. Курсовые и навигационные автоматы самолетов
гражданской авиации. М., «Транспорт», 1971.
8. О.А.Бабич, В.А.Боднер, М.С.Козлов и др. Авиационные приборы и навигационные системы.
Учеб для инж. вузов ВВС/ Под ред. В.А.Боднера. – Изд. ВВИА им. проф.Н.Е.Жуковского, 1969.
9. ОСНОВЫ ЭЛЕКТРОТЕХНИКИ, МИКРОЭЛЕКТРОНИКИ И УПРАВЛЕНИЯ - Комиссаров Ю.А.
2.1 Схемы включения универсальных асинхронных микро-электродвигателей до 0.5кВт.