Файл: Е. А. Богданов Основы технической диагностики нефтегазового оборудования.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 28.03.2024
Просмотров: 183
Скачиваний: 9
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

СОДЕРЖАНИЕ
И)"’ м/с; Опор - 10* м/с?.
Перечисленные пороговые величины приняты по ИСО-1683 таким образом, что числовые значения уровней виброперемещения, виброскорости и виброускорения механических колебаний с синусоидальной формой волны и угловой скоростью w0 = Ю00 с"1 равны друг другу.
Таким образом, абсолютные значения S, v и а выражают в децибелах относительно их стандартного порогового значения. При сравнении значений механических колебаний достаточно показать лишь разность соответствующих уровней и х2 в децибелах. Пример перевода децибел в относительные безразмерные единицы приведен в табл. 9.2.
При выражении вибропараметров в линейных единицах измерений их размерность определяется масштабами соответствующих параметров. Для большинства машинных агрегатов амплитуда виброперемещений составляет величины порядка десятков микрон, а виброскорости — порядка десятков миллиметров в секунду (см., например, табл. 2.1). Поэтому при выражении виброцараметров в линейных единицах виброперемещение принято измерять в микронах (мкм), виброскорость — в мм/с, а виброускорение — в м/с2.
Приборно-измерительные комплексы и аппаратура, применяемые для контроля и обработки вибросигналов, оТличакугся разнообразием конструктивного исполнения и функциональными возможностями. Общими для всех видов аппаратуры является наличие измерительных преобразователей (ИП) для фиксации параметров вибросигналов, электронных блоков регистраций и обработки вибрационных сигналов и средств коммутации датчиков с электронны- 3L
ми блоками. Аппаратура выпускается как одно-, так и многоканальная, стационарная и переносная. Современные переносные приборы выпускаются, как правило, одноканальными и по функциональным возможностям делятся на два класса: приборы-сборщики вибросигналов, позволяющие измерять общий уровень вибрации, записывать, хранить и передавать информацию на компьютер для ее последующей обработки и анализа; приборы, называемые сборщиками-анализаторами, позволяющие дополнительно выполнить анализ формы вибросигнала, его частотный и спектральный анализ с помощью быстрого преобразования Фурье.
Стационарная аппаратура включает базовый компьютер, соединенный линиями связи с ИП, средствами усиления сигналов и преобразования их в цифровую форму. Неотъемлемой частью современных систем вибродиагностики и мониторинга является программное обеспечение для компьютера. Программное обеспечение отличается уровнем сложности и перечнем решаемых задач: сбор, хранение, обработка и анализ Информации, выявление и идентификация дефектов, выдача долгосрочного прогноза технического состояния оборудования и др. Самыми сложными являются программы автоматической диагностики, позволяющие наряду с автоматической постановкой диагноза И выдачей прогноза технического состояния оборудования формировать рекомендации по его обслуживанию и ремонту.
Стационарная аппаратура обычно изготовляется многоканальной, позволяющей ве^ти контроль одновременно в ряде характерных точек контролируемого объекта. Для роторных машин большой единичной мощности параллельный многоканальный контроль параметров вибрации в разных (двух-трех) направлениях является обязательным, так как позволяет определить орбиту движения вала в подшипнике (прецессию) и взаимный анализ одновременных спектров. Кроме того, любая система вибрационной диагностики включает в себя датчик оборотов (чаще всего вихретоновый), подключаемый к цифровому входу виброанализатора.
При контроле параметров вибрации используют два метода измерения: кинематичес^ки и динамический.
Кинематический Метод заключается в том, что измеряют координаты точек объекта Относительно выбранной неподвижной системы координат. ИП, основанные на этом методе измерения, называют преобразователями оросительной вибрации.
Динамический ме^од основан на том, что параметры вибрации измеряют относительно искусственной неподвижной системы отсчета. Такие ИП назыв^от преобразователями абсолютной вибрации. Системы измерения Вибрации, использующие в качестве искусственной неподвижной системы отсчета инерционный элемент, связанный с объектом И^рез упругий подвес, называют сейсмическими системами.
ИП бывают контактными и бесконтактными, основанными на разных физических Млениях. По принципу работы ИП абсолютной вибрации разделяют на генераторные и параметрические. Генераторные ИП осуществляют прямое преобразование механической энергии в электрический сигнал. К ним относят пьезоэлектрические, индукционные и др. Источник энергии им не нужен. В параметрических ИП, в отличие от генераторных, происходит изменение соответствующих электрических параметров (сопротивления, емкости, напряжения, индуктивности) под воздействием механических вибрационных колебаний. К параметрическим ИП относят тензорезистор- ные, емкостные, датчики Холла, индуктивные и др. Параметрическим ИП требуется вспомогательный источник энергии.
Для измерения абсолютной вибрации наибольшее распространение нашли генераторные пьезоэлектрические ИП, обладающие высокой надежностью, большим частотным диапазоном и простым конструктивным исполнением (принцип действия пьезоэлементов рассмотрен в 9.4). Для измерения относительной вибрации, например при определении формы орбиты вала в подшипнике скольжения, обычно используются вихретоковые ИП. Перечисленные выше ИП являются контактными и требуют закрепления на исследуемом объекте. При контроле вибрации в труднодоступных местах, в условиях высоких температур, агрессивных сред, повышенной радиации и других специальных условиях могут применяться бесконтактные измерители относительной вибрации. Чаще применяются лазерные бесконтактные ИП.
Наряду с конструктивными особенностями и местом установки на результаты измерений существенное влияние оказывает способ крепления контактных ИП на контролируемом объекте. Соединение ИП с колеблющейся поверхностью имеет определенную упругость, которая, обладая способностью демпфировать энергию колебаний, изменяет уровень и частотный состав вибрации. Поэтому особенности крепления и места установки ИП особо оговариваются в методиках вибродиагностики соответствующих объектов.
Измерения проводят в контрольных точках На элементах машины, которые в максимальной степени реагируют на динамическое состояние, т.е. в которых регистрируемый вибрационный сигнал имеет наибольшую величину. Как правило, такими элементами являются корпуса подшипников. Полную оценку вибрационного состояния крупных агрегатов получают путем измерения вибропараметров в трех взаимно перпендикулярных направлениях (вертикальном, горизонтальном и осевом). Такую оценку обычно производят в период приемочных испытаний и после динамической балансировки машины. В период эксплуатации чаще ограничиваются измерениями в одном или двух направлениях.
При проведении диагностики необходимо Учитывать особенности каждого вида оборудования, обусловленные их виброактивностью. Ниже рассматриваются основные особенности виброакгивно- сти и вибродиагностические признаки наиболее общих элементов оборудования.
Ротором называется звено, совершающее вращательное движение. Все машины, имеющие роторы, можно разделить на две группы:
Ко второй группе относится большинство роторных машин. Вместе с тем полностью уравновешенных роторов не бывает.
Для снижения вибрации роторы при их изготовлении стремятся максимально сбалансировать, но из-за неточности изготовления и сборки, неоднородности материала, деформации деталей ротора под нагрузкой и при асимметрии теплового поля, износа подшипниковых узлов всякий ротор имеет некоторую неуравновешенность. Неуравновешенность роторов является главной причиной вибрации роторных машин.
При эксплуатации оборудования силы и моменты сил инерции от неуравновешенности ротора возрастают, так как к остаточным дисбалансам в плоскостях опор после балансировки добавляются технологические и эксплуатационные дисбалансы. Это приводит к необходимости балансировать роторы не только при их изготовлении, но также и в процессе ремонта и виброналадки на предприятиях, эксплуатирующих роторные машины. Так, например, ротор центробежного насоса, предварительно уравновешенный на балансировочном станке, в процессе работы насоса может оказаться по ряду причин гидродинамически неуравновешенным: в частности, из-за различия межлопастных объемов при заполнении их технологической жидкостью.
В общем случае дисбалансы роторов в условиях эксплуатации складываются из трех составляющих:
Ц = +IA, <Д>],
где 7)р — дисбаланс ротора при установившейся рабочей скорости машины; D0CT — дисбаланс ротора после его балансировки на балансировочном станке (остаточный дисбаланс); DTj — сумма технологических дисбалансов, возникающих при присоединении дополнительных элементов к ротору после его уравновешивания (например, зубчатой передачи); Аэ, — эксплуатационные дисбалансы, дополнительно возникающие в процессе работы; [D] — предельно допустимый эксплуатационный дисбаланс.
J ( Во время вращения неуравновешенность вызывает переменны нагрузки на опорах ротора и его динамический прогиб. Существую два основных типа неуравновешенности — статическая и моментная.
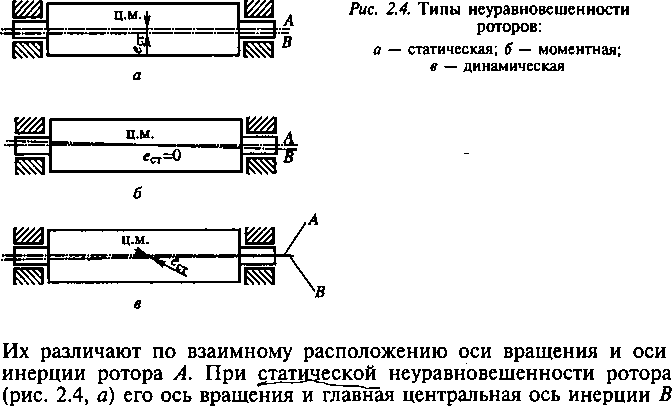
параллельны, но находятся на некотором расстоянии ест друг от друга. При моментной неуравновешенности (рис. 2.4, б^оси пересекаются в центре масс ротора, поэтому момеЯгйая’неуравновешенность не обнаруживается при статической балансировке. Наиболее общий случай, когда на роторе одновременно присутствует статическая и моментная неуравновешенности, называется динамической неуравновешенностью (рис. 2.4, в). При динамической неуравновешенности оси инерции и вращения непараллельны и пересекаются или перекрещиваются не в центре масс. Вклад от того или иного типа неуравновешенности определяется следующим правилом: полусумма составляющей вибрации в опорах на частоте вращения ротора определяет вклад от статической неуравновешенности, а полуразность — от моментной.
В зависимости от величины неуравновешенной силы инерции FW возникающей при нормальной работе, машины делятся на четыре категории: малой динамичности, средней, большой и очень большой.
Под действием силы F„ ротор в процессе вращения дополнительно получает динамический прогиб у. Закономерность изменения прогиба у рассмотрим на примере идеализированного одномассового ротора с одной степенью свободы в виде невесомого вала с массивным диском, расположенным посередине между подшипниковыми опорами (рис. 2.5, а). Центробежная сила инерции FK, действующая на такой ротор, уравновешивается силой его упругости F^p:
т(о2(у + ест) = су,
где т —- масса вращающегося ротора; со — частота вращения ротора; ес. — смещение оси инерции ротора (центра масс) относительно оси его вращения; с — коэффициент жесткости ротора.
Рис. 2.5. Амплитудно-частотная характеристика однодискового неуравновешенного ротора с различным демпфированием:
Перечисленные пороговые величины приняты по ИСО-1683 таким образом, что числовые значения уровней виброперемещения, виброскорости и виброускорения механических колебаний с синусоидальной формой волны и угловой скоростью w0 = Ю00 с"1 равны друг другу.
Таким образом, абсолютные значения S, v и а выражают в децибелах относительно их стандартного порогового значения. При сравнении значений механических колебаний достаточно показать лишь разность соответствующих уровней и х2 в децибелах. Пример перевода децибел в относительные безразмерные единицы приведен в табл. 9.2.
При выражении вибропараметров в линейных единицах измерений их размерность определяется масштабами соответствующих параметров. Для большинства машинных агрегатов амплитуда виброперемещений составляет величины порядка десятков микрон, а виброскорости — порядка десятков миллиметров в секунду (см., например, табл. 2.1). Поэтому при выражении виброцараметров в линейных единицах виброперемещение принято измерять в микронах (мкм), виброскорость — в мм/с, а виброускорение — в м/с2.
-
Средства контроля и обработки виброси^алов
Приборно-измерительные комплексы и аппаратура, применяемые для контроля и обработки вибросигналов, оТличакугся разнообразием конструктивного исполнения и функциональными возможностями. Общими для всех видов аппаратуры является наличие измерительных преобразователей (ИП) для фиксации параметров вибросигналов, электронных блоков регистраций и обработки вибрационных сигналов и средств коммутации датчиков с электронны- 3L
ми блоками. Аппаратура выпускается как одно-, так и многоканальная, стационарная и переносная. Современные переносные приборы выпускаются, как правило, одноканальными и по функциональным возможностям делятся на два класса: приборы-сборщики вибросигналов, позволяющие измерять общий уровень вибрации, записывать, хранить и передавать информацию на компьютер для ее последующей обработки и анализа; приборы, называемые сборщиками-анализаторами, позволяющие дополнительно выполнить анализ формы вибросигнала, его частотный и спектральный анализ с помощью быстрого преобразования Фурье.
Стационарная аппаратура включает базовый компьютер, соединенный линиями связи с ИП, средствами усиления сигналов и преобразования их в цифровую форму. Неотъемлемой частью современных систем вибродиагностики и мониторинга является программное обеспечение для компьютера. Программное обеспечение отличается уровнем сложности и перечнем решаемых задач: сбор, хранение, обработка и анализ Информации, выявление и идентификация дефектов, выдача долгосрочного прогноза технического состояния оборудования и др. Самыми сложными являются программы автоматической диагностики, позволяющие наряду с автоматической постановкой диагноза И выдачей прогноза технического состояния оборудования формировать рекомендации по его обслуживанию и ремонту.
Стационарная аппаратура обычно изготовляется многоканальной, позволяющей ве^ти контроль одновременно в ряде характерных точек контролируемого объекта. Для роторных машин большой единичной мощности параллельный многоканальный контроль параметров вибрации в разных (двух-трех) направлениях является обязательным, так как позволяет определить орбиту движения вала в подшипнике (прецессию) и взаимный анализ одновременных спектров. Кроме того, любая система вибрационной диагностики включает в себя датчик оборотов (чаще всего вихретоновый), подключаемый к цифровому входу виброанализатора.
При контроле параметров вибрации используют два метода измерения: кинематичес^ки и динамический.
Кинематический Метод заключается в том, что измеряют координаты точек объекта Относительно выбранной неподвижной системы координат. ИП, основанные на этом методе измерения, называют преобразователями оросительной вибрации.
Динамический ме^од основан на том, что параметры вибрации измеряют относительно искусственной неподвижной системы отсчета. Такие ИП назыв^от преобразователями абсолютной вибрации. Системы измерения Вибрации, использующие в качестве искусственной неподвижной системы отсчета инерционный элемент, связанный с объектом И^рез упругий подвес, называют сейсмическими системами.
ИП бывают контактными и бесконтактными, основанными на разных физических Млениях. По принципу работы ИП абсолютной вибрации разделяют на генераторные и параметрические. Генераторные ИП осуществляют прямое преобразование механической энергии в электрический сигнал. К ним относят пьезоэлектрические, индукционные и др. Источник энергии им не нужен. В параметрических ИП, в отличие от генераторных, происходит изменение соответствующих электрических параметров (сопротивления, емкости, напряжения, индуктивности) под воздействием механических вибрационных колебаний. К параметрическим ИП относят тензорезистор- ные, емкостные, датчики Холла, индуктивные и др. Параметрическим ИП требуется вспомогательный источник энергии.
Для измерения абсолютной вибрации наибольшее распространение нашли генераторные пьезоэлектрические ИП, обладающие высокой надежностью, большим частотным диапазоном и простым конструктивным исполнением (принцип действия пьезоэлементов рассмотрен в 9.4). Для измерения относительной вибрации, например при определении формы орбиты вала в подшипнике скольжения, обычно используются вихретоковые ИП. Перечисленные выше ИП являются контактными и требуют закрепления на исследуемом объекте. При контроле вибрации в труднодоступных местах, в условиях высоких температур, агрессивных сред, повышенной радиации и других специальных условиях могут применяться бесконтактные измерители относительной вибрации. Чаще применяются лазерные бесконтактные ИП.
Наряду с конструктивными особенностями и местом установки на результаты измерений существенное влияние оказывает способ крепления контактных ИП на контролируемом объекте. Соединение ИП с колеблющейся поверхностью имеет определенную упругость, которая, обладая способностью демпфировать энергию колебаний, изменяет уровень и частотный состав вибрации. Поэтому особенности крепления и места установки ИП особо оговариваются в методиках вибродиагностики соответствующих объектов.
Измерения проводят в контрольных точках На элементах машины, которые в максимальной степени реагируют на динамическое состояние, т.е. в которых регистрируемый вибрационный сигнал имеет наибольшую величину. Как правило, такими элементами являются корпуса подшипников. Полную оценку вибрационного состояния крупных агрегатов получают путем измерения вибропараметров в трех взаимно перпендикулярных направлениях (вертикальном, горизонтальном и осевом). Такую оценку обычно производят в период приемочных испытаний и после динамической балансировки машины. В период эксплуатации чаще ограничиваются измерениями в одном или двух направлениях.
При проведении диагностики необходимо Учитывать особенности каждого вида оборудования, обусловленные их виброактивностью. Ниже рассматриваются основные особенности виброакгивно- сти и вибродиагностические признаки наиболее общих элементов оборудования.
-
Виброактивность роторов
Ротором называется звено, совершающее вращательное движение. Все машины, имеющие роторы, можно разделить на две группы:
-
машины с конструктивно неуравновешенными движущимися частями (поршневые компрессоры, поршневые насосы, качалки и др.); -
машины с номинально уравновешенными движущимися частями.
Ко второй группе относится большинство роторных машин. Вместе с тем полностью уравновешенных роторов не бывает.
Для снижения вибрации роторы при их изготовлении стремятся максимально сбалансировать, но из-за неточности изготовления и сборки, неоднородности материала, деформации деталей ротора под нагрузкой и при асимметрии теплового поля, износа подшипниковых узлов всякий ротор имеет некоторую неуравновешенность. Неуравновешенность роторов является главной причиной вибрации роторных машин.
При эксплуатации оборудования силы и моменты сил инерции от неуравновешенности ротора возрастают, так как к остаточным дисбалансам в плоскостях опор после балансировки добавляются технологические и эксплуатационные дисбалансы. Это приводит к необходимости балансировать роторы не только при их изготовлении, но также и в процессе ремонта и виброналадки на предприятиях, эксплуатирующих роторные машины. Так, например, ротор центробежного насоса, предварительно уравновешенный на балансировочном станке, в процессе работы насоса может оказаться по ряду причин гидродинамически неуравновешенным: в частности, из-за различия межлопастных объемов при заполнении их технологической жидкостью.
В общем случае дисбалансы роторов в условиях эксплуатации складываются из трех составляющих:
Ц = +IA, <Д>],
где 7)р — дисбаланс ротора при установившейся рабочей скорости машины; D0CT — дисбаланс ротора после его балансировки на балансировочном станке (остаточный дисбаланс); DTj — сумма технологических дисбалансов, возникающих при присоединении дополнительных элементов к ротору после его уравновешивания (например, зубчатой передачи); Аэ, — эксплуатационные дисбалансы, дополнительно возникающие в процессе работы; [D] — предельно допустимый эксплуатационный дисбаланс.
J ( Во время вращения неуравновешенность вызывает переменны нагрузки на опорах ротора и его динамический прогиб. Существую два основных типа неуравновешенности — статическая и моментная.
параллельны, но находятся на некотором расстоянии ест друг от друга. При моментной неуравновешенности (рис. 2.4, б^оси пересекаются в центре масс ротора, поэтому момеЯгйая’неуравновешенность не обнаруживается при статической балансировке. Наиболее общий случай, когда на роторе одновременно присутствует статическая и моментная неуравновешенности, называется динамической неуравновешенностью (рис. 2.4, в). При динамической неуравновешенности оси инерции и вращения непараллельны и пересекаются или перекрещиваются не в центре масс. Вклад от того или иного типа неуравновешенности определяется следующим правилом: полусумма составляющей вибрации в опорах на частоте вращения ротора определяет вклад от статической неуравновешенности, а полуразность — от моментной.
В зависимости от величины неуравновешенной силы инерции FW возникающей при нормальной работе, машины делятся на четыре категории: малой динамичности, средней, большой и очень большой.
Под действием силы F„ ротор в процессе вращения дополнительно получает динамический прогиб у. Закономерность изменения прогиба у рассмотрим на примере идеализированного одномассового ротора с одной степенью свободы в виде невесомого вала с массивным диском, расположенным посередине между подшипниковыми опорами (рис. 2.5, а). Центробежная сила инерции FK, действующая на такой ротор, уравновешивается силой его упругости F^p:
т(о2(у + ест) = су,
где т —- масса вращающегося ротора; со — частота вращения ротора; ес. — смещение оси инерции ротора (центра масс) относительно оси его вращения; с — коэффициент жесткости ротора.
Рис. 2.5. Амплитудно-частотная характеристика однодискового неуравновешенного ротора с различным демпфированием:

