Добавлен: 28.03.2024
Просмотров: 123
Скачиваний: 15
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Приложения
Приложение 1
Образовательная автономная некоммерческая организация высшего образования
«МОСКОВСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ»
| | |
Факультет «Строительства и техносферной безопасности»
Направление подготовки 13.03.02 «Электроэнергетика и электротехника»
Курсовая работа
| по дисциплине: | Электрические машины | ||
| | (название дисциплины) | ||
| на тему: | Расчет параметров асинхронного электродвигателя | | |
| | (тема работы) | | |
| | | | |
Обучающийся группы ООБЭЭ-21031с
ФИО Черепанов
Александр Владимирович
Москва, 202_ г.
Оглавление
Приложения 1
ВВЕДЕНИЕ 3
Выбор двигателя по номинальной мощности 4
Вариант 4 подвариант А 4
Масса груза, кг*103 4
3 4
Скорость подъема, м/с 4
0,3 4
Высота подъема h, м 4
10 4
Коэффициент, учитывающий противовес, k 4
0,5 4
подъемника, η 4
0,7 4
Коэффициент увеличения мощности, KP 4
1,5 4
Число пазов Z1 5
48 5
Число полюсов 2р 5
8 5
Гармоника ν 5
5 5
Расчет обмоточных данных 7
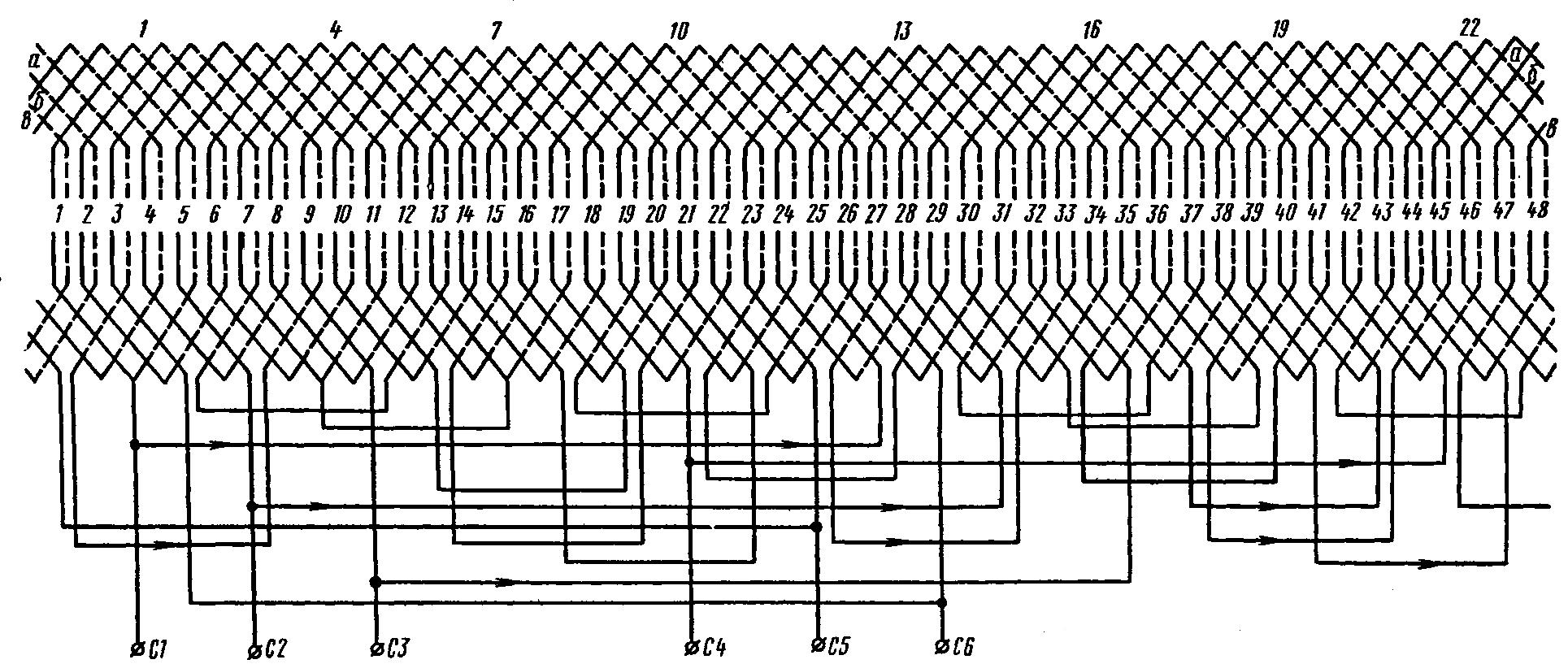
Построение развернутой схемы обмотки статора 8
Определение эффективных значений фазной и линейной ЭДС первой, третьей, пятой и седьмой гармоник 9
ВВЕДЕНИЕ
Асинхронный электродвигатель (также Асинхронная машина) — электрический двигатель переменного тока, частота вращения ротора которого не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
В ряде стран к асинхронным двигателям причисляют также коллекторные двигатели. Второе название асинхронных двигателей — индукционные, это обусловлено тем, что ток в обмотке ротора
индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют большую часть электрических машин, применяясь главным образом в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую, в подавляющем большинстве это асинхронные двигатели с короткозамкнутым ротором (АДКЗ).
Принцип действия асинхронного двигателя заключается в том, что ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле так, чтобы поля статора и ротора стали взаимно неподвижными. В двигательном режиме частота вращения ротора немного меньше, а в генераторном режиме — больше частоты вращения магнитного поля. При равенстве скоростей поле перестаёт наводить в роторе ток, и на ротор перестаёт действовать сила Ампера. Отсюда и название — асинхронный двигатель (в отличие от синхронного, частота вращения которого совпадает с частотой магнитного поля). Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся двигательном режиме скольжение невелико: 1-8 % в зависимости от мощности.
Форматировать согласно требованиям (по ширине листа с соблюдением абзацев).
Выбор двигателя по номинальной мощности
Вариант 4 подвариант А
| Масса груза, кг*103 | 3 |
| Скорость подъема, м/с | 0,3 |
| Высота подъема h, м | 10 |
| Коэффициент, учитывающий противовес, k | 0,5 |
| КПД подъемника, η | 0,7 |
| Коэффициент увеличения мощности, KP | 1,5 |
| Число пазов Z1 | 48 |
| Число полюсов 2р | 8 |
| Гармоника ν | 5 |
Мощность двигателя:
P
 10^-3 =
10^-3 = = 3.675 кВт
= 3.675 кВтДвигатель выбираем из базы данных БД ielectro.
Ближайший по мощности двигатель 4АМА100L4 (Р=4 кВт, n=1500 об/мин).
Номинальный момент
 =
= 
Максимальный момент
Мм=3Мн=3*25,5 =76,5 Н м.
Тип обмотки
Двухслойные петлевые обмотки (рис. 1) применяют практически во всех машинах средней и большинстве машин большой мощности. Основными достоинствами двухслойных петлевых обмоток являются возможность выполнения катушек с укорочением шага (при этом ку <1) и равномерность распределения их лобовых частей.
К недостаткам относятся наличие изоляционной прокладки между слоями обмотки в пазе и необходимости подъема шага при укладке, что не дает возможности механизировать процесс укладки двухслойных обмоток в пазы машины.
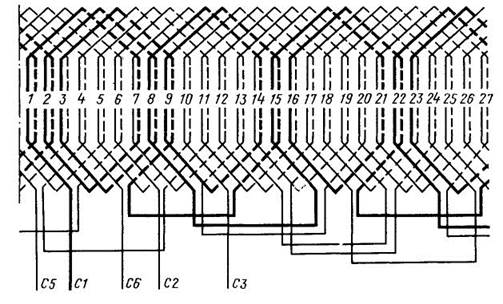
Рис.1
Расчет обмоточных данных
Расчет обмоточных данных состоит в определении основных данных:
N – число катушечных групп;
y – шаг обмотки;
q – число пазов на полюс и фазу;
α – число электрических градусов, приходящихся на один паз;
а – число параллельных ветвей.
Шаг обмотки (у1) – это расстояние, выраженное в зубцах (или пазах), между
активными сторонами одной и той же секции:
 ξ =
ξ =  шаг обмотки
шаг обмотки = 6*0,8 = 4,8 паза
= 6*0,8 = 4,8 паза =
= пазов
пазовТак как q > 1, то обмотка называется рассредоточенной, при этом фазные катушки должны быть разделены на секции, число которых равно q.
Число катушечных групп.
В двухслойных обмотках число катушечных групп механически увеличивается в два раза, однако, по
сравнению с однослойной обмоткой, с числом витков в каждой секции меньшим в два раза.
 = 2*4 = 8 шт
= 2*4 = 8 шт = 8*3 = 24 шт
= 8*3 = 24 штЧисло электрических градусов на один паз:
 эл.град.
эл.град.Построение развернутой схемы обмотки статора
Шаг обмотки:
Число пазов на полюс и фазу:

Пазовый угол:

Сдвиг между началами фазных обмоток:
λ =120/α =120/30 = 4 паза.

Определение эффективных значений фазной и линейной ЭДС первой, третьей, пятой и седьмой гармоник
Где расчеты?




Определим значение фазной ЭДС обмотки статора:
Где расчеты?
Выражение определяет значение фазной ЭДС обмотки статора. Что же касается линейной ЭДС, то ее значение зависит от схемы соединения обмотки статора: при соединении звездой Е1Л=√3Е1, а при соединении треугольником Е1Л = Е1
Каталожные данные асинхронных двигателей: Зачем приводите эти данные?
Асинхронные двигатели 4АМА100 предназначены для применения в широком спектре устройств общепромышленного оборудования.
Классификация
Двигатели классифицируются по высоте оси вращения, длине станины, числу полюсов
Структура условного обозначения 4АМА100[*][*] У3:
4 – порядковый номер серии;
А – асинхронный;
М – модернизированный;
А – станина и щиты алюминиевые;
100 – габарит (высота оси вращения, мм);
[*] – установочный размер по длине станины (S, L);
[*] – число полюсов (2; 4; 6; 8);
У3 – климатическое исполнение и категория размещения по ГОСТ 15150—69.
Особенности конструкции
Двигатель выполнен закрытым с наружным обдувом.
Статор состоит из алюминиевой станины с горизонтальным оребрением с прилитым корпусом коробки выводов и сердечника, запрессованного в станину. Статор двигателя имеет трехфазную обмотку. Обмотка статора — всыпная, выполненная эмалированным проводом. Ротор представляет собой сердечник из электротехнической стали, насаженный на вал. Короткозамкнутая обмотка ротора выполнена из алюминия. Подшипниковые щиты выполнены из алюминия. В подшипниковых щитах установлены закрытые подшипники, в которые заложена смазка на весь срок службы подшипника. Тип подшипников — 76- 180306К1С9Ш2У.
Кожух вентилятора дистанционирован от статора и образует кольцевой воздуховод охлаждающего воздуха.
Токоввод электродвигателя выполнен в виде коробки выводов исполнения К-3-I. Конструктивное исполнение двигателей (рис. 1—3) по способу монтажа IМ1081, IМ1082, IМ2081, IМ2082, IМ3081 по ГОСТ 2479—79.
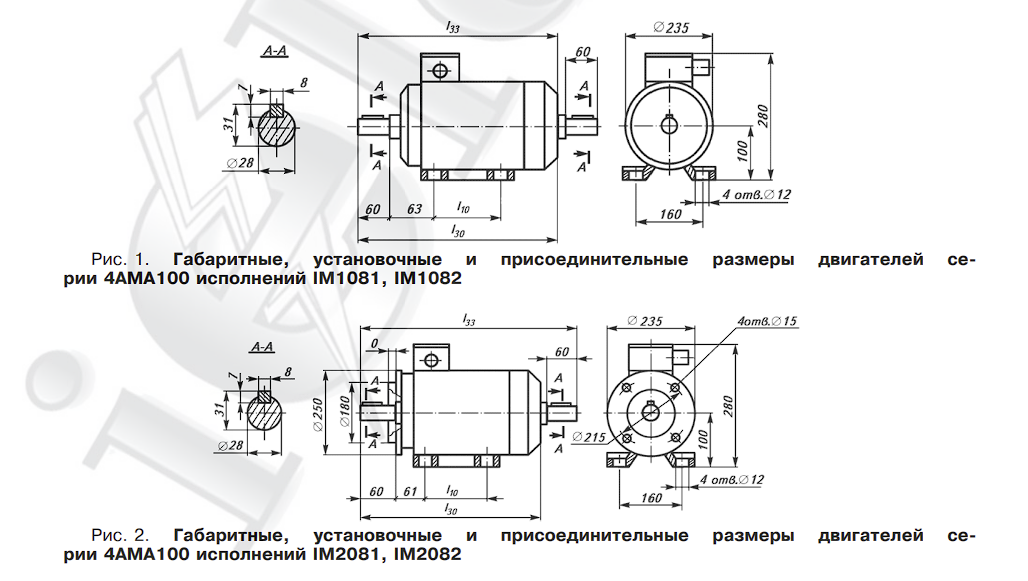
| Типоисполнение | Размеры, мм | ||
| l10 | l30 | l33 | |
| 4АМА100S | 112 | 365 | 427 |
| 4АМА100L | 140 | 395 | 457 |
Предельные отклонения установочных и присоединительных размеров по ГОСТ 8592—79.
Степень защиты двигателей IР54 по ГОСТ 17494—87.
Способ охлаждения — 1С0141 по ГОСТ 20459—87.
Условия эксплуатации:
высота над уровнем моря до 1000 м; при эксплуатации на высотах более 1000 м мощность на валу должна быть снижена с учетом коэффициента нагрузки, приведенного в табл. 1;
| Высота, м | 1000 | 1500 | 2000 | 2500 | 3000 | 3500 | 4000 | 4300 |
| Коэффициент нагрузки | 1 | 0,98 | 0,95 | 0,92 | 0,88 | 0,84 | 0,80 | 0,75 |

