Файл: Пояснительная записка к курсовому проекту по дисциплине Автоматизация технологических процессов.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.05.2024
Просмотров: 48
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Основные теоретические положения
Современные тенденции в развитии систем сбора, обработки информации и управления всё более внедряются в такие области измерений, каким является коммерческий учёт нефти и нефтепродуктов (УУН). Схема автоматизации узла учёта нефти (УУН) приведена на рисунке 3.1.
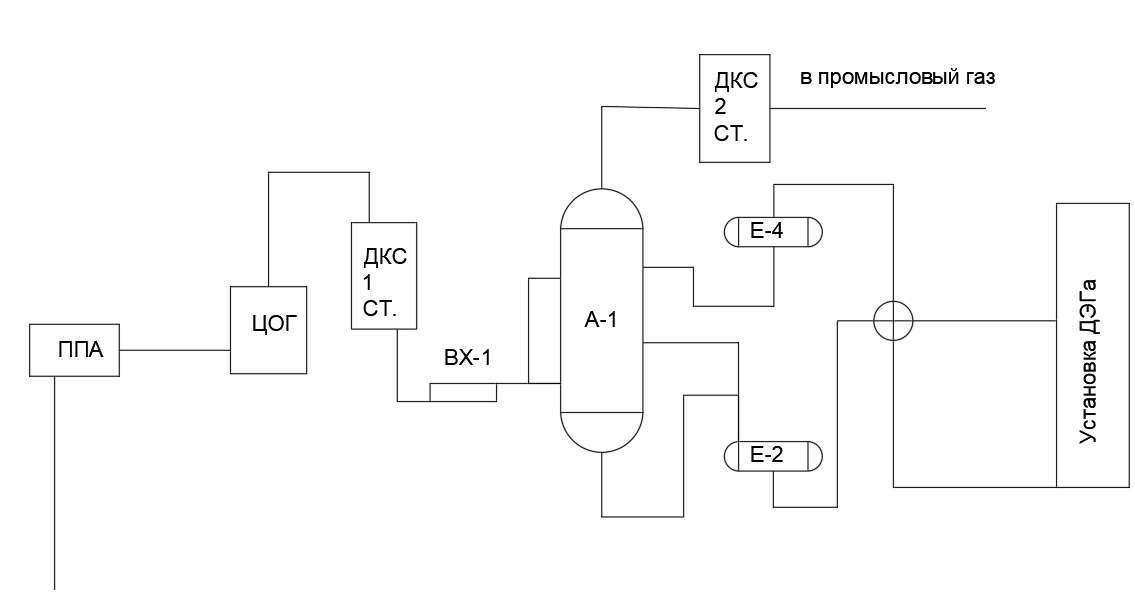
Рисунок 3.1 - Схема автоматизации УУН
Большое число проектируемых узлов учёта нефти базируются на принципах и оборудовании, заложенных еще в 70-е годы (турбинные). В настоящее время всё более используются автоматизированные узлы учёта нефти нового поколения, отвечающие мировым тенденциям в области автоматизации.
В соответствии с действующими нормативным документами для товарно-коммерческих расчётов приёмно-даточные операции осуществляются в единицах массы[ГОСТ Р 8.615-2005].
 Ранее применяемые расходомеры на коммерческом УУН использовали объёмный принцип измерения расхода, т.е. метод измерения массового расхода является косвенным, что приводит к использованию дополнительных средств измерения, вследствие чего возникают дополнительные погрешности.
Ранее применяемые расходомеры на коммерческом УУН использовали объёмный принцип измерения расхода, т.е. метод измерения массового расхода является косвенным, что приводит к использованию дополнительных средств измерения, вследствие чего возникают дополнительные погрешности.Возрастающие требования к качеству измерения расхода на узлах коммерческого учёта вызывает необходимость замены ряда устаревших приборов на более современные.
Существует несколько методов измерения массы продуктов - прямые и косвенные. Структурная схема измерения массы продуктов приведены на рисунке_3.2.
Рисунок 3.2 - Структурная схема измерения массы продуктов
При применении прямых методов измеряют массу продуктов с помощью весов, массовых счётчиков и массовых расходомеров.
При применении объёмно-массового метода измеряют объём (
 ) и плотность продукта (
) и плотность продукта ( ) при одинаковых условиях, затем определяют массу продукта:
) при одинаковых условиях, затем определяют массу продукта:  | (3.1) |
При изменении гидростатического метода измеряют гидростатическое давление столба продукта, определяют площадь заполнения ёмкости.
К современным системам измерения коммерческого расхода на УУН относят массовые (кориолисовые) расходомеры, которые осуществляют прямое измерение массового расхода.Первые кориолисовые расходомеры были сконструированы в 1970-х годах.
Принцип действия заключается в том, что когда трубки совершают колебательные движения, в системе возникает дополнительная сила инерции – сила Кориолиса. И под действием этой силы трубки начинают изгибаться. Их изгиб фиксируется датчиками(детекторами скорости).
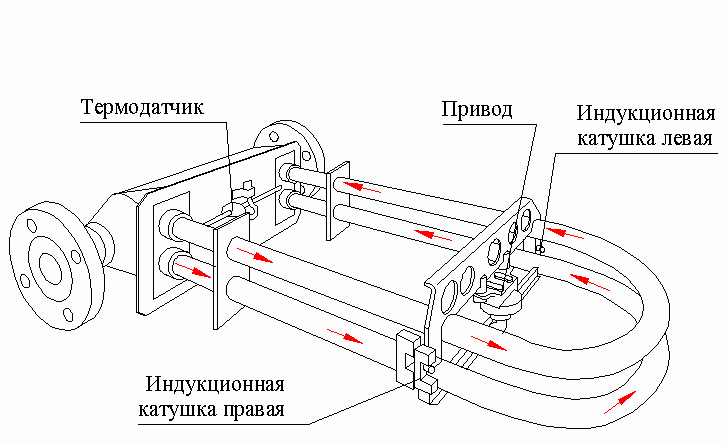
Рисунок 3.3 - Строение кориолисова раходомера
Кориолисовый расходомер с колеблющимся участком трубопровода, состоит из сенсора и электронного преобразователя сигнала (датчика). Сенсор имеет одну или две измерительные трубки (обычно U-образные), концы которых закреплены неподвижно (рисунок 3.3). Под воздействием электромагнита, расположенного в центре трубки, и контура обратной связи трубка совершает колебания с собственной резонансной частотой (амплитуда около 1мм, частота около 80 циклов в секунду). Благодаря этому жидкость, протекающая по трубке, приобретает вертикальную составляющую движения. Во время первой половины цикла при движении трубки вверх жидкость, протекающая через первую половину трубки, сопротивляется движению вверх и оказывает давление на трубку сверху вниз. Жидкость, движущаяся во второй (выходной) половине трубки, сопротивляется уменьшению вертикальной составляющей движения, оказывая давление на трубку снизу вверх. Это приводит к закручиванию трубки. Во время второй половины цикла колебания, когда трубка движется вниз, она закручивается в противоположную сторону.

5
4
3
2
1
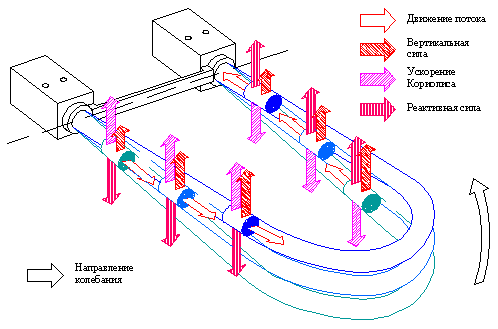
Рисунок 3.4 - Действие сил на сенсорные трубки
Цифрами на рисунке 3.4 обозначены: 1 - движения потока, 2 - вертикальная сила, 3 - ускорение Кориолиса, 4 - реактивная сила, 5 - направление колебания.
Результирующие силы Кориолиса, действующие на жидкость в двух ветвях противоположны по направлению и приводят ветви к смещению. Форма результирующих сил Кориолиса имеет вид:
 , , | (3.2) |
где:
 - сила Кориолиса;
- сила Кориолиса;  - движущаяся масса;
- движущаяся масса; - угловая скорость;
- угловая скорость;  - линейная скорость во вращающейся или колеблющейся системе. Когда направление угловой скорости меняется, эти силы также меняют направление и ветви смещаются в противоположную сторону. Величина этих смещений пропорциональна массовому расходу жидкости через трубу. Смещения регистрируются при помощи электромагнитных детекторов скорости. Их выходной сигнал представляет собой импульс, длительность которого пропорциональна для жидкостей, так и для газов, выдавая измерение расхода с высокой точностью (
- линейная скорость во вращающейся или колеблющейся системе. Когда направление угловой скорости меняется, эти силы также меняют направление и ветви смещаются в противоположную сторону. Величина этих смещений пропорциональна массовому расходу жидкости через трубу. Смещения регистрируются при помощи электромагнитных детекторов скорости. Их выходной сигнал представляет собой импульс, длительность которого пропорциональна для жидкостей, так и для газов, выдавая измерение расхода с высокой точностью ( для жидкостей и
для жидкостей и  для газов). Кориолисовые расходомеры не чувствительны к изменениям температуры и давления.
для газов). Кориолисовые расходомеры не чувствительны к изменениям температуры и давления.Уравнение для определения массового расхода имеет вид:
 , , | (3.3) |
где:
 - Массовый расход;
- Массовый расход;  - амплитуда колебаний трубок при действии силы Кориолиса
- амплитуда колебаний трубок при действии силы Кориолиса
;
 - амплитуда вынужденных колебаний;
- амплитуда вынужденных колебаний;  - фаза;
- фаза;  - постоянная прибора при
- постоянная прибора при  ;
; - частота вынужденных колебаний.
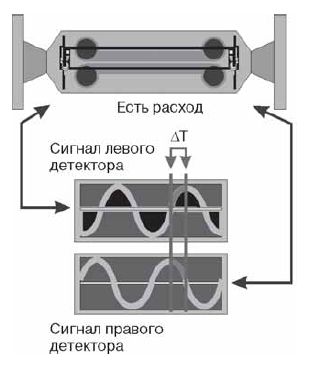
- частота вынужденных колебаний.Когда расход отсутствует, синусоидальные сигналы с детекторов находятся в одной фазе (рисунок 3.5, а)

а) б)
Рисунок 3.5 - Измерение расход с помощью детекторов
При прохождении через сенсор измеряемой массы в результате эффекта Кориолиса электромагнитные детекторы скорости измеряют фазовый сдвиг (рисунок 3.5, б). Разница во времени между сигналами  измеряется в микросекундах и прямо пропорциональна массовому расходу
измеряется в микросекундах и прямо пропорциональна массовому расходу  .
.  , , | (3.4) |
Чем больше
 , тем больше массовый расход.
, тем больше массовый расход.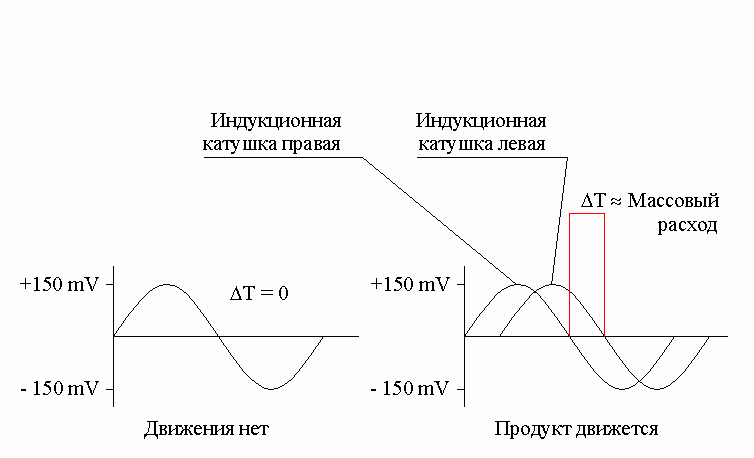
Рисунок 3.6 - Сигналы детекторов сенсора
Детекторы преобразуют этот сигнал в аналоговый или в частотно-импульсный выходной сигнал.
-
Измерение плотности
С помощью кориолисовых расходомеров можно получить сигнал, позволяющий измерить плотность жидкости.
Задающая катушка (рисунок 3.7) питается от преобразователя, при этом сенсорные трубки колеблются с их собственной частотой.


Рисунок 3.7 - Сборка магнитов и катушек
При прохождении через сенсор измеряемой среды масса трубок увеличивается, собственная частота колебаний трубок уменьшается.При уменьшении расхода масса трубки уменьшается, и их собственная частота колебаний увеличивается. Так как масса измеряемой среды равна произведению плотности
 и внутреннего объёма
и внутреннего объёма  , а объём трубок является постоянным, то частота колебания трубок будет зависеть от плотности среды.
, а объём трубок является постоянным, то частота колебания трубок будет зависеть от плотности среды.Частота колебаний измеряется выходным детектором в циклах в секунду (Гц). Как известно, период колебаний обратно пропорционален частоте. Измерение времени цикла проще, чем измерение количестве циклов, поэтому детекторы вычисляют плотность измеряемой среды по периоду колебаний трубок в микросекундах (рисунок 3.8).

Рисунок 3.8 - Измерение периода колебаний
Таким образом, плотность протекающей жидкости будет прямо пропорциональная периоду колебаний сенсорных трубок.Плотность сенсора определяется по формуле:
 , , | (3.5) |
где:
 - плотность;
- плотность;  - калибровочная постоянная для плотности;
- калибровочная постоянная для плотности;  - частота вынуждающей силы при пустых трубках и температуре ;
- частота вынуждающей силы при пустых трубках и температуре ;  - частота вынуждающей силы при заполненных трубках и температуре .
- частота вынуждающей силы при заполненных трубках и температуре .Заключение
В ходе автоматизации данного технологического процесса были выбраны современные средства измерения и регулирования такие как: датчики перепада давления Метран-150-CD, датчик для измерения избыточного давления Метран-150-CG, датчики температуры серии Метран-276-T, датчики уровня OPTIWAVE 7300C и т.д.

