Файл: Отчет по лабораторной работе 1 по дисциплине Основы теории управления.doc
Добавлен: 16.03.2024
Просмотров: 20
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство образования Российской федерации
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра автоматизированных систем управления (АСУ)
ОТЧЕТ
По лабораторной работе № 1
по дисциплине «Основы теории управления»
Выполнил:
Студент__________
230105
28.03.2008
2008
1. ЦЕЛЬ РАБОТЫ
Целью лабораторной работы является изучение и приобретение практических навыков работы с моделями и частотными и переходными характеристиками типовых динамических звеньев систем управления.
2. ОСНОВНЫЕ СООТНОШЕНИЯ
В общем случае какой-либо объект в теории автоматического управления описывается передаточной функцией, содержащей полиномы от р произвольного порядка в числителе и знаменателе. Если передаточная функция объекта содержит простой множитель только в числителе либо в только в знаменателе, то такой объект называется типовым динамическим звеном.
К
лассификацию типовых звеньев удобно осуществить, рассматривая различные частные формы дифференциального уравнения
Значения коэффициентов уравнения (1) и названия для наиболее часто встречающихся звеньев приведены в таблице 1.
Как известно, звенья, у которых коэффициенты а2 0 и b1 0 , обладают статизмом, т.е. однозначной связью между входной и выходной переменными в статическом режиме.
Другие виды звеньев, у которых коэффициенты а2 0, а1 0 и а0 0, обладают инерционностью (замедлением).
Таблица 1
| № п.п. | Наименование звена | a0 | a1 | a2 | b0 | b1 | Примечания |
| 1 2 3 4 5 6 7 8 | Безынерционное (пропорциональное) Инерционное 1-го порядка (апериодическое) Инерционное 2-го порядка (апериодическое) Инерционное 2-го порядка (колебательное) Идеальное интегрирующее Реальное интегрирующее Идеальное дифференцирующее Реальное дифференцирующее | 0 0 T22 T22 0 T 0 0 | 0 T T1 T1 1 1 0 T | 1 1 1 1 0 0 1 1 | 0 0 0 0 0 0 k k | k k k k k k 0 0 | T1 ≥ 2T2 T1 < 2T2 |
3. РЕЗУЛЬТАТЫ РАБОТЫ
Классификацию типовых звеньев удобно осуществить, рассматривая различные частные формы дифференциального уравнения.
Пропорциональное (безынерционное) звено описывается уравнением
и имеет передаточную функцию
Параметр k называется коэффициентом передачи звена и может иметь любую размерность.
Инерционное (апериодическое) звено 1-го порядка
Описывается дифференциальным уравнением вида
Перейдя к изображениям, была получена передаточная функция
Идеальное дифференцирующее звеноописывается уравнением
а его передаточная функция имеет вид
Идеальное интегрирующее звеноописывается таким уравнением
причём передаточная функция представима в виде
Реальное дифференцирующее звено
Такое звено является последовательным соединением дифференцирующего и инерционного звеньев, а его передаточная функция имеет вид

Инерционное апериодическое звено 2-го порядка
В общем случае звено второго порядка описывается уравнением
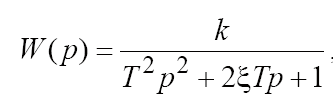
Передаточная функция апериодического звена 2-го порядка имеет вид
где
 .
.Из выражения передаточной функции такого типа звена видно, что апериодическое звено второго порядка состоит из двух инерционных (апериодических) звеньев с эквивалентными постоянными времени Т

3, Т4, поэтому логарифмические частотные характеристики этих инерционных звеньев складываются.
Инерционное колебательное звено 2-го порядка
Это звено получается при комплексных сопряжённых полюсах передаточной функции. Передаточную функцию звена удобнее записать в виде:
причём при 0 < ξ < 1 звено колебательное, а при ξ ≥ 1 звено уже является апериодическим 2-го порядка.
В данной работе были рассмотрены все эти типы динамических типовых звеньев. Коэффициенты их уравнений представлены в таблице 2.
Таблица 2
| № п.п. | Наименование звена | a0 | a1 | a2 | b0 | b1 | Примечания |
| 1 | Безинерционное (пропорциональное) | 0 | 0 | 1 | 0 | 10 | |
| 2 | Инерционное 1-го порядка (апериодическое) | 0 | T = 0,1 | 1 | 0 | 10 | |
| 3 | Инерционное 2-го порядка (апериодическое) | T22 = 0,0016 | T1= 0,1 | 1 | 0 | 10 | T1 2T2 |
| 4 | Инерционное 2-го порядка (колебательное) | T22 = 0,04 | T1= 0,1 | 1 | 0 | 10 | T1 < 2T2 |
| 5 | Идеальное интегрирующее | 0 | 1 | 0 | 0 | 10 | |
| 6 | Реальное интегрирующее | T = 0,1 | 1 | 0 | 0 | 10 | |
| 7 | Идеальное дифференцирующее | 0 | 0 | 1 | 10 | 0 | |
| 8 | Реальное дифференцирующее | 0 | T = 0,1 | 1 | 10 | 0 | |
Далее для каждого звена по его передаточной функции запишем операторное уравнение. Так как параметр k = 10 (коэффициент перед b1), то операторные уравнения запишутся в виде:
Безынерционное (пропорциональное) звено
W(s) =
Инерционное 1-го порядка (апериодическое) звено
W(s) =
Инерционное 2-го порядка (апериодическое) звено
W(s) =
Инерционное 2-го порядка (колебательное) звено
W(s) =
Идеальное интегрирующее звено
W(s) =
Реальное интегрирующее звено
W(s) =
Идеальное дифференцирующее звено
W(s) =
Реальное дифференцирующее звено
W(s) =
Для инерционных звеньев по логарифмическим частотным характеристикам определяем частоты сопряжения и среза.
Инерционное 1-го порядка (апериодическое) звено
W(s)ср = 99,5 рад/с
Инерционное 2-го порядка (апериодическое) звено
W(s)ср = 70,93 рад/с
Инерционное 2-го порядка (колебательное) звено
W(s)ср = 16,48 рад/с
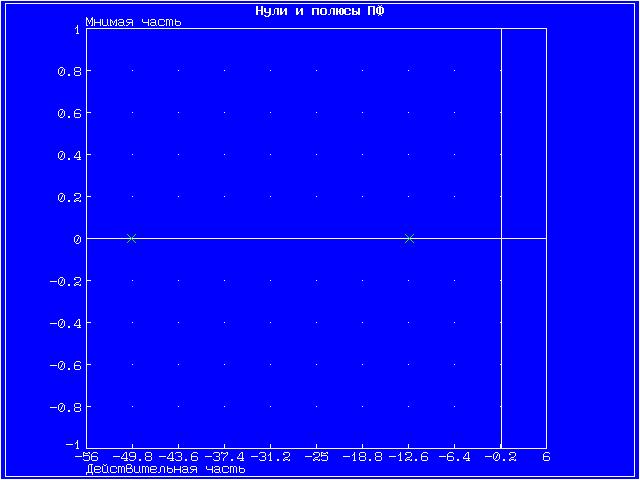
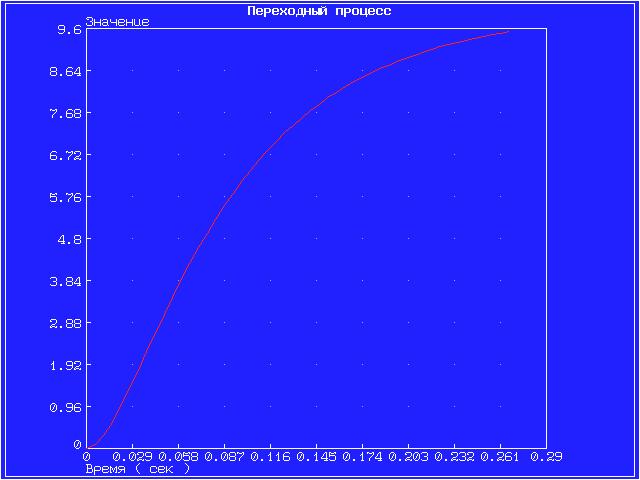
Значения полюсов и нулей передаточных функций, а также их влияние на переходный процесс, представлены на графиках ниже.
Инерционное 2-го порядка (апериодическое)
На графике представлены нули функции (крестиками).
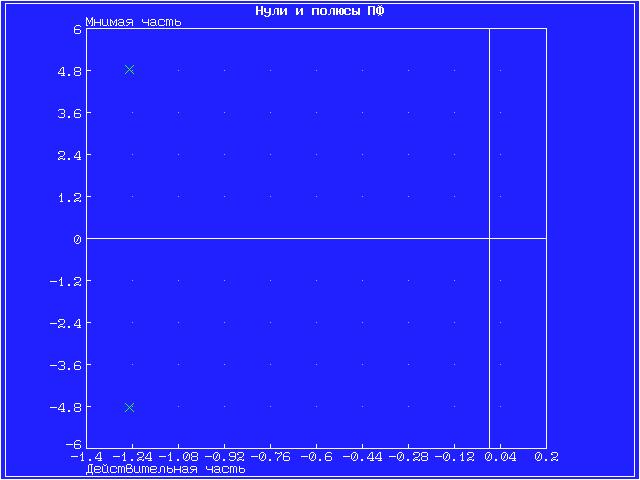
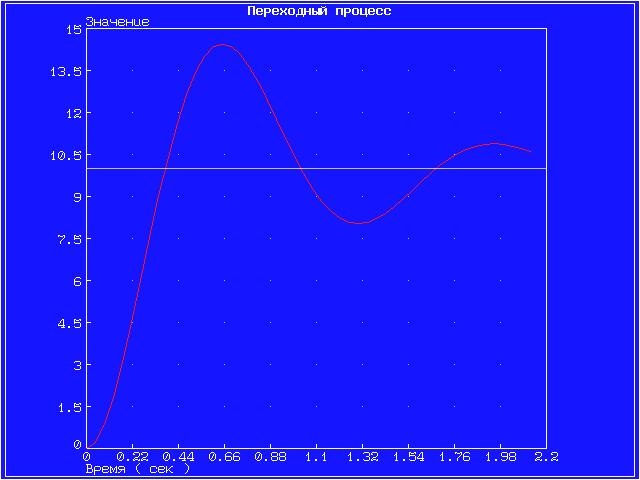
Инерционное 2-го порядка (колебательное)
На графике представлены полюсы функции.
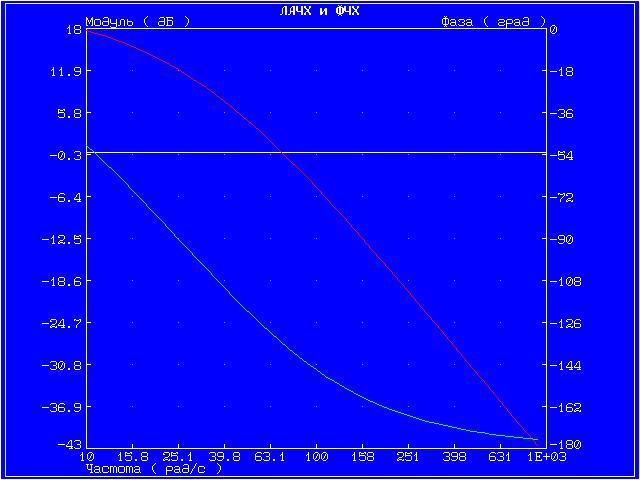
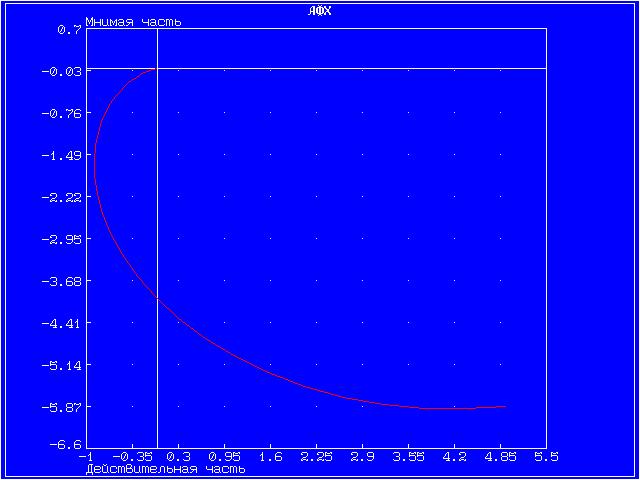
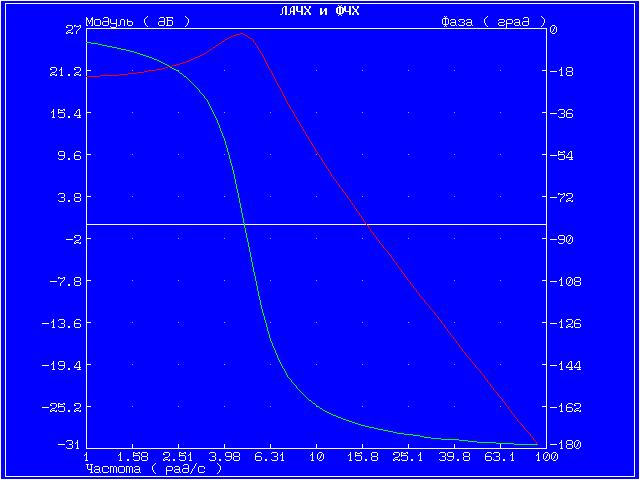
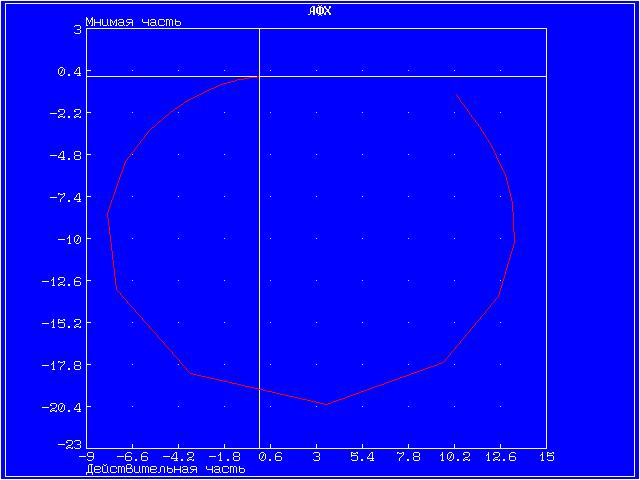
Графики амплитудной фазовой характеристики (АФХ), логарифмической амплитудной частотной характеристики (ЛАЧХ) и логарифмической фазовой частотной характеристики (ЛФЧХ).
Точная ЛАЧХ системы управления рассчитывается по формуле:
где А — коэффициент наклона ЛАХЧ.
Точная ЛФЧХ рассчитывается как сумма аргументов от АФХ звеньев, составляющих САУ, то есть:
где k — номер звена, n — общее количество звеньев САУ.
Графики ЛАЧХ и ЛФЧХ представлены на одной системе координат. Красный график — логарифмическая амплитудная частотная характеристика, зелёный график — логарифмическая фазовая частотная характеристика.
График амплитудной фазовой характеристики представлен на отдельном рисунке.
Инерционное 2-го порядка (апериодическое)
Инерционное 2-го порядка (колебательное)
4. ВЫВОДЫ
В результате проделанной работы были изучены модели восьми звеньев, но более подробно исследовались звенья 2-го порядка. Для звена по его передаточной функции записано операторное уравнение. Построены графики переходных функций и определены нули и полюсы динамического звена.
С помощью логарифмических частотных характеристик определены частоты среза и сопряжения.
Колебательное звено имеет более сложные характеристики и менее гладкие графики АФХ, ЛАЧХ, ЛФЧХ.
Колебания малых частот «пропускаются» звеном с отношением амплитуд выходной и входной величин, близким к статистическому коэффициенту передачи звена k. Колебания больших частот проходит с сильным ослаблением амплитуды.
5. ВОПРОСЫ
1. Что такое передаточная функция?
Любая система, которую можно возбудить гармоническими колебаниями, будет реагировать на них также каким-то колебательным движением.
Существует характеристика, которая определяет преобразование амплитуды и сдвиг фазы выходного колебания по отношению к входному. Такой характеристикой может быть следующее отношение