Файл: Цель работы освоить два метода приближенного определения оптимальных параметров дискретных пид регуляторов Непрерывные системы уравнения Задание.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 18
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Цель работы: освоить два метода приближенного определения оптимальных параметров дискретных ПИД регуляторов
Непрерывные системы уравнения
Задание
1. Найдите передаточные функции: разомкнутой Wpc(s) и замкнутой
2. Постройте область устойчивости системы в плоскости общего
коэффициента передачи
3. Постройте графики логарифмической амплитуды и фазовых частотных
характеристик (ЛАЧХ и ЛФЧХ)
4. Оцените запасы устойчивости по модулю
5. Если исходная система не удовлетворяет заданным в табл. 2 показателям качества tп,
6. Вычислите в скорректированной системе переходный процесс на выходе
Методические указания
Структура исследуемой замкнутой линейной непрерывной САУ, где y0(t) - задающее воздействие, v(t) - возмущающее воздействие,

Значения параметров
Таблица 1
| Номер варианта | tп | | | | |
| 9 | 2.0 | 45 | 0.048 | 0.1 | 3 |

Определим передаточную функцию замкнутой линейной непрерывной САУ.
Определим передаточную функцию разомкнутой системы при ν = 0
 . (1)
. (1)После подстановки выражений передаточных функций W1(s), W2(s) и W3(s) получим
Wрс(s) = K/L(s),
где K = K1 K2 K3, L(s) = (T1s + 1) (T2s + 1) (T3s2 + s).
Передаточной функцией замкнутой системы W(s) будет выражение
 (2)
(2)Выведем передаточную функцию относительно ошибки
(s) = E(s)/Y 0(s). (3)
Выразим E(s) через E(s) = Y0(s) - Y(s), а Y(s) через Y(s) = E(s)∙W1(s) W2(s) W3(s) = E(s) Wрс(s). Подставим E(s) и Y(s) в формулу (3)

или We(s) + We(s)Wрс(s) = 1.
Отсюда получим передаточную функцию относительно ошибки
 . (4)
. (4)и передаточную функцию относительно возмущения
 (5)
(5)при y0 = 0 получим следующим образом. Найдем выражение Y(s) = [-Y(s)W1(s) W2(s) - V(s)] W3(s), в котором перенесем в левую часть выражение -Y(s)W1(s) W2(s) W3(s) = Y(s) Wрс(s)
Y(s) + Y(s) Wрс(s) = - V(s)∙W3(s)
и выделим Y(s)
 .
.Подставляя последнее выражение в (5), получим
 . (6)
. (6)регулятор синтез дискретный simulink
Если y0(t) ≠ 0 и ν(t) ≠ 0, то выход Y(s) в системе определится как алгебраическая сумма
Y(s) = W(s) Y0(s) - Wν(s) V(s).
Передаточная функция разомкнутой исходной системы имеет вид Wpc(s) = K/L(s). Характеристическим уравнением замкнутой системы будет
,
где b4 = K. При заданных в табл. 1 числовых значениях

Wрс(s) = K/L(s),
где K = K1 K2 K3, L(s) = (0.048s + 1) (0.1s + 1) (3s2 + s).
Передаточная функция замкнутой системы

Отсюда получим передаточную функцию относительно ошибки
и передаточную функцию относительно возмущения

При Т1 = 0.048, Т3 = 3, Т20, 0.1, K0, 10 определим границу устойчивости, используя пр. 1.
| Пр. 1 |
| dbpred=1;T1=0.048;T3=3; for T2=0:0.01:0.11;for K=0:0.005:10; b=conv(conv(conv([T1 1],[T2 1]),[T3 1]),[1 0]); b(5)=b(5)+K; db=b(4)*(b(2)*b(3)-b(1)*b(4))-b(5)*b(2)^2; if db*dbpred<0; hold on; plot(T2,K,'.'),grid xlabel('T2'),ylabel('K') hold off end; dbpred=db; end; end; |
На рис. 1 приводится результат работы пр. 1 - граница области устойчивости в плоскости параметров K, T2, по которой определим предельное значение K= 6.945 при T2 = 0.1.
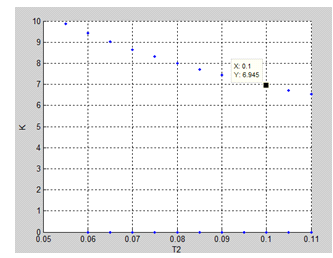
Рис. 1
При
| Пр. 2 |
| T1=0.048;T2=0.1; T3=3;K=4.9; W1=tf([1],[T1 1]); W2=tf([1],[T2 1]); W3=tf([1],[T3 1 0]); W=K*W1*W2*W3; margin(W) |
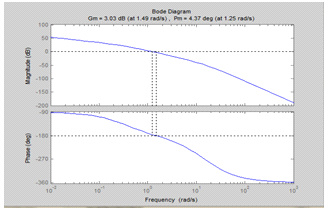
Рис. 2
Запасы устойчивости по модулю
Для ориентировочной оценки tп и
| Пр. 3 |
| T1=0.048;T2=0.1; T3=3;K=4.9; W1=tf([1],[T1 1]); W2=tf([1],[T2 1]); W3=tf([1],[T3 1 0]); Wpc=K*W1*W2*W3; W=feedback(Wpc,+1); step(W) |