Файл: Цель работы освоить два метода приближенного определения оптимальных параметров дискретных пид регуляторов Непрерывные системы уравнения Задание.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 19
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Далее зададим переменные, позволяющие улучшить качество переходного процесса. Для этого на вкладке Response Optimization в поле Design Variables Set выделим пункт New. Откроется окно "Create Design Variables Set", изображенное на рис. 23, в правой части которого выделим настраиваемые переменные Kp, Ki, Kd и с помощью стрелки перенесем их в левую часть окна на (рис. 23).
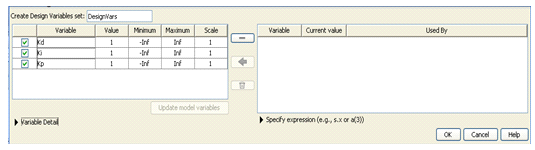
Рис. 23
В окне "Design Optimization" запустим процесс оптимизации параметров регулятора, нажав кнопку Optimize. После окончания процесса оптимизации в этом окне будет выведен график переходного процесса, изображенный на рис. 24.
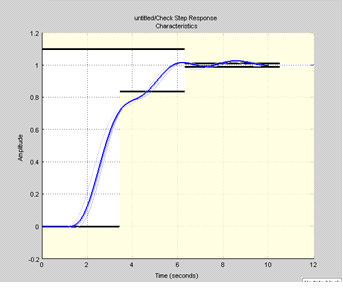
Рис. 24
Перейдем в окно схемы системы управления в SIMULINK и запустим процесс симуляции с улучшенными параметрами регулятора. График переходного процесса с более высоким качеством представлен на рис. 25.
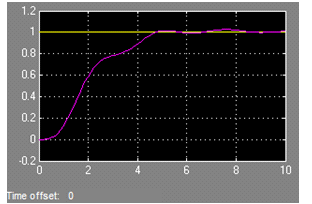
Рис. 25
Качество переходного процесса оценивается критерием - величиной относительной средне модульной ошибки, которая вычисляется с момента k* достижения задания y0(k) = 1 выходом y(t), т.е. выполнения условия |y0(k*) - y(k*)|/ y0(k*) < 0.05.

Средне модульная ошибка вычисляется с помощью программы введенной в командную строку MATLAB:
k=1; Sum=0;i=1:50abs(y0(i)-y(i))/y0(i)<0.05(k)=y0(i);(k)=y(i);=k+1;;(abs(y0-y)/1)/k
Величина относительной средне модульной ошибки, равная 1.5%, характеризует удовлетворительное качество переходного процесса. При этом параметры PID- регулятора будут следующими: Kp = -0.06815, Ki = 0.236, Kd = 1.584.
Вывод
В ходе выполнения лабораторной работы были получены удовлетворительные показатели качества переходного процесса с помощью, корректирующего устройства корневого годографа, программы rltool пакета MATLAB.
Во второй части получены оптимальные параметры дискретного PID - регулятора с помощью Simulink. Для повышения качества переходного процесса использовалась надстройка Response optimization.
В результате процесса оптимизации были улучшены параметры качества PID - регулятора, средне модульная ошибка, удовлетворяющая нужным условиям.
