Файл: Решение для промежутка 0, , т е. решается следующая задача Коши.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 27.03.2024
Просмотров: 11
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

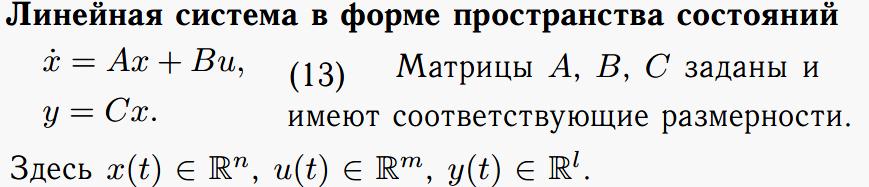
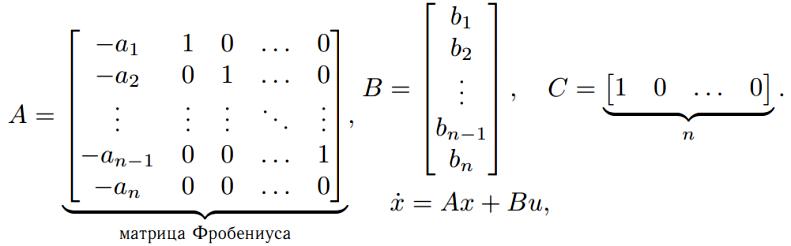
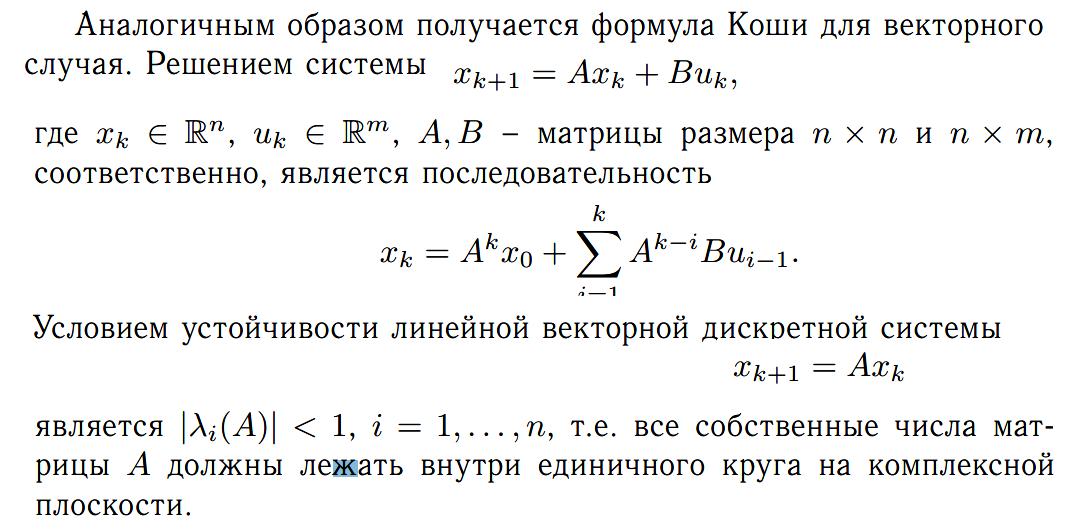
Лаба 1 Линейные Системы
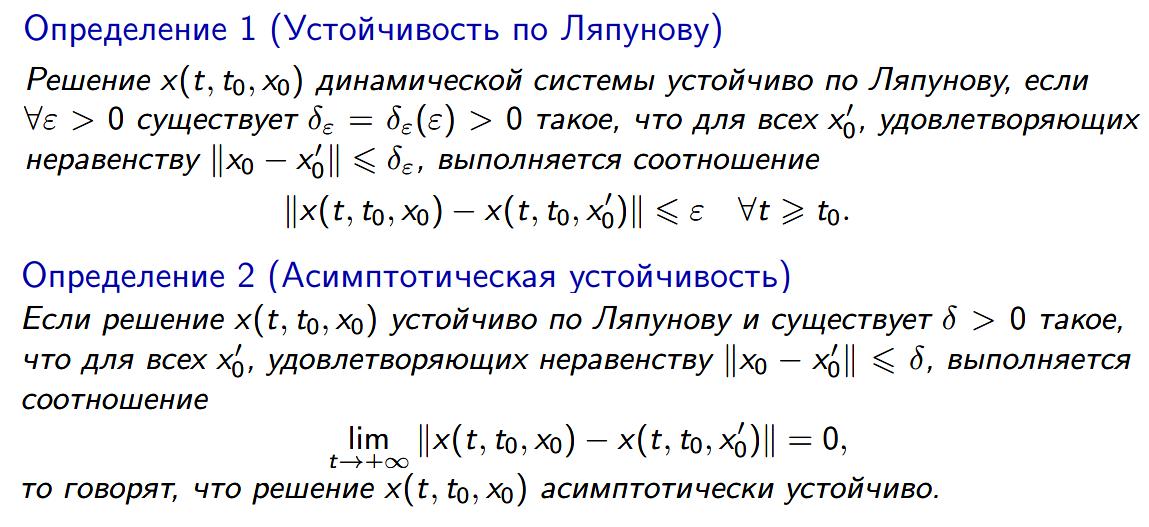 | Неустойчивость по Ляпунову – это логическое отрицание устойчивости по Ляпунову. Тривиальное решение ????(????) ≡ 0 линейной системы (1) называется неустойчивым по Ляпунову, если существует такое ???? > 0 и такие начальные данные, для которых выполнено: |????(????, ????0)| > ????. |
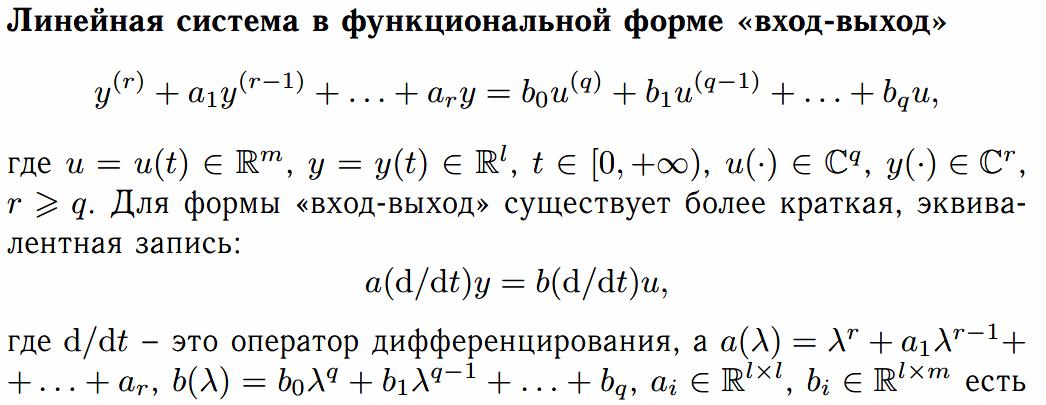
характеристические многочлены линейной динамической системы c постоянными матричными коэффициентами.
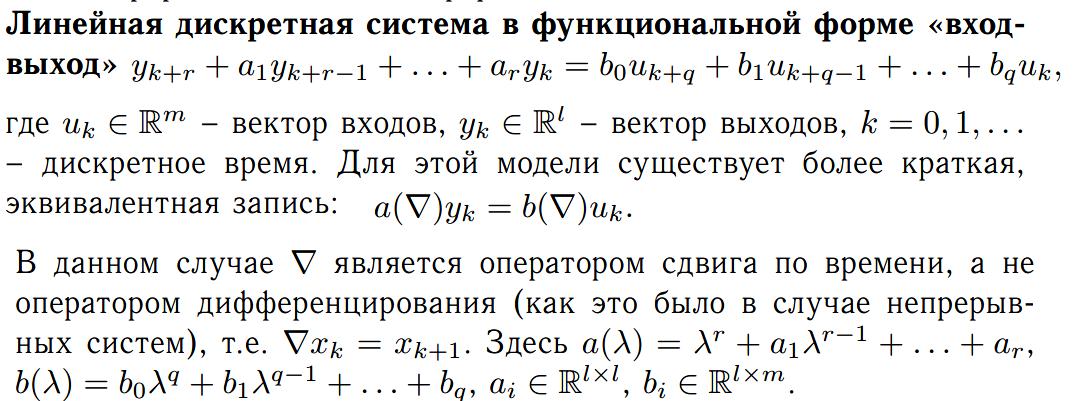
 | На самом деле все функциональные модели «вход-выход» неявно подразумевают модель в пространстве состояний, иначе негде было бы взять существование и единственность решения. Вход-выход к ФПС: |
 | Слайд 23 - про характериск-й многочлен и теорему. (ФПС-входвыход) Стр. 46 - передаточная функция |
Лабораторная 4 Дискретные

Слайд 21 - дискретизация
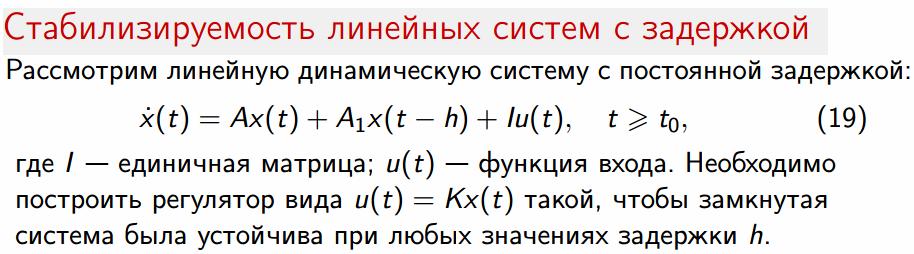
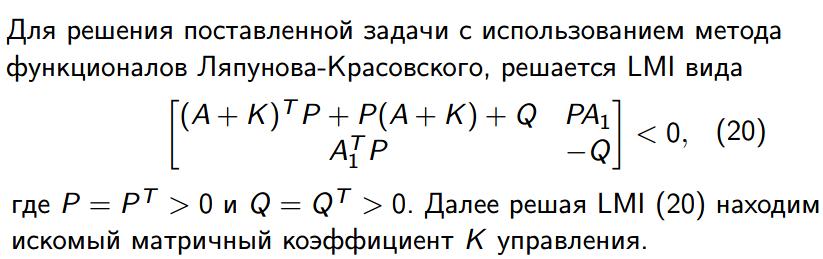
Лабораторная 5 Задержка
 | Для поиска решения системы (1) можно использовать метод шагов, предложенный Р. Беллманом [59]. Его идея заключается в следующем. Вначале ищется решение для промежутка ???? ∈ [0, ℎ], т.е. решается следующая задача Коши: Затем процедура повторяется для интервалов времени [ℎ, 2ℎ], [2ℎ, 3ℎ] и т.д. Если ????(????) ≡ const, то решения уравнения (1) являются многочленами, явно зависящими от переменной ????. |
Разумихина

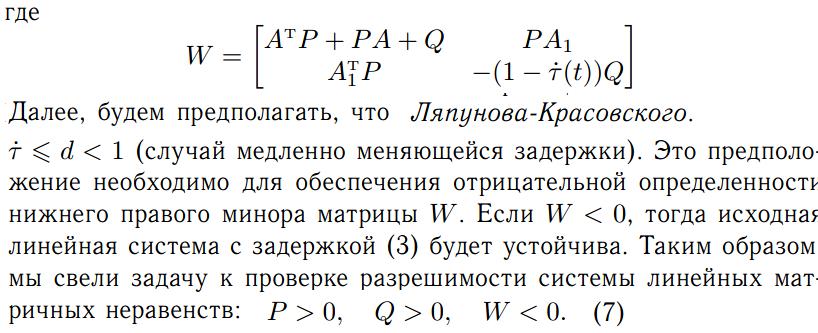
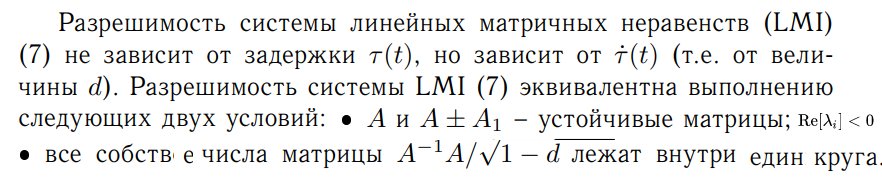
Данное матричное неравенство не является линейным, так как оно содержит член ????????, где ???? и ???? – неизвестные. Однако оно легко сводится к линейному путем выбора конкретного значения ???? > 0. Таким образом, мы получили достаточные условия устойчивости тривиального решения ????(????) ≡ 0 для систем с произвольной задержкой (без ограничений). Задача свелась к проверки разрешимости системы матричных неравенств ???? > 0 и (10).
Критерий сильвестора:
 Критерий Сильвестра: Для положительной определенности матрицы ???? необходимо и достаточно, чтобы все ее угловые миноры ∆???? были положительны. Для отрицательной определённости матрицы ???? необходимо и достаточно, чтобы ее угловые миноры четного порядка были положительны, а нечетного порядка – отрицательны.
Критерий Сильвестра: Для положительной определенности матрицы ???? необходимо и достаточно, чтобы все ее угловые миноры ∆???? были положительны. Для отрицательной определённости матрицы ???? необходимо и достаточно, чтобы ее угловые миноры четного порядка были положительны, а нечетного порядка – отрицательны.Лабораторная 6 ДЕСКРИПТОРНЫЙ МЕТОД
Ранее мы рассматривали методы, гарантирующие устойчивость системы с запаздыванием при любом запаздывании. Интересно было бы рассмотреть метод, гарантирующий устойчивость системы с запаздыванием при задержке, принадлежащей некоторому промежутку. Одним из таких методов является дескрипторный метод [63, 64]. Будем рассматривать линейную систему с запаздыванием:


Полученная дескрипторная система эквивалентна исходной (16) в смысле устойчивости. При дескрипторном подходе ????˙(????) не заменяется на правую часть дифференциального уравнения.
Рассмотрим стандартную функцию Ляпунова:
где ????2 ∈ R ????×????, ????3 ∈ R ????×???? – произвольные матричные переменные.
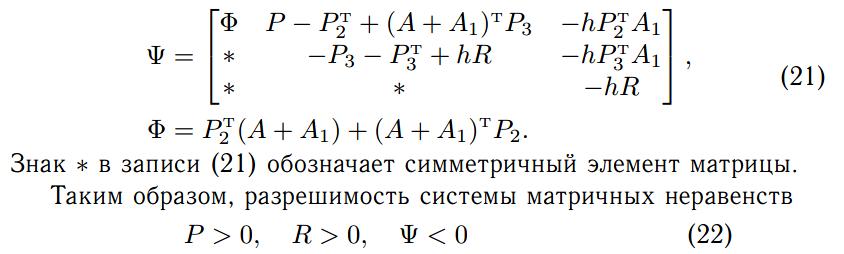
означает асимптотическую устойчивость тривиального решения системы (16) при верхней границе запаздывания равной ℎ. Если предположить, что верхняя граница запаздывания ℎ неизвестна, то матричное неравенство Ψ не является линейным. Если мы хотим найти верхнюю границу величины запаздывания, при которой тривиальное решение системы будет устойчивым, мы можем фиксировать и постепенно увеличивать ℎ до тех пор, пока система линейных матричных неравенств (22) не перестанет быть разрешимой.
Лабораторная 3
Бифуркация – это явление, при котором малое изменение параметра (или параметров) динамической системы приводит к изменению характера её решений.
Лабораторная 2 Нелинейные
Конечное время ухода решения на бесконечность. Множественность состояний равновесия. Существуют нелинейные системы, которые могут колебаться с фиксированной амплитудой и частотой вне зависимости от начальных условий этих систем. Этот тип колебаний известен как автоколебания. Бифуркации.
Рассмотрим нелинейную систему:
 | 1) Проблема существования. Решение нелинейной системы может существовать не на всем рассматриваемом промежутке времени. 2) Проблема единственности. На рассматриваем промежутке времени у нелинейной системы может быть несколько решений. |
 | Теперь введем определения положения равновесия. Точка (???? * , ????* , ????* ) называется положением равновесия, если решение, начинающееся в этой точке, остается в ней же (траектория состоит из одной точки). Для поиска положений равновесия нужно приравнять производные к нулю. |
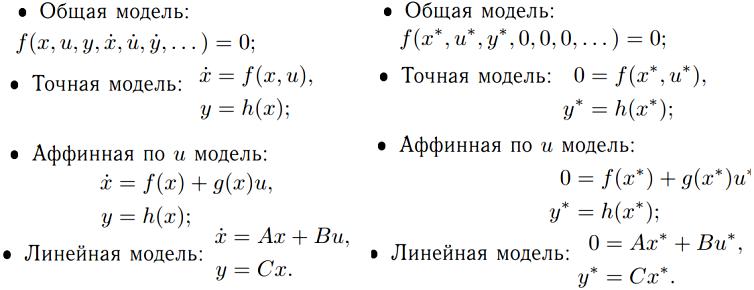 У нелинейной системы может быть несколько положений равновесия, поэтому каждое из них можно исследовать на локальную устойчивость. В случае, если нелинейная система имеет единственное положение равновесия, то оно может быть глобально асимптотически устойчиво. Теперь поговорим о методах исследования устойчивости нелинейных систем. | Пусть Положение равновесия ???? * = 0 называется локально устойчивым, если для любого ???? > 0 существует ????(????) > 0 такое, что, если ‖????(0)‖ < ????, то ‖????(????)‖ < ????, ∀???? > 0. Положение равновесия ???? * = 0 называется локально асимптотически устойчивым, если существует ???? > 0 такое, что, если ‖????(0)‖ < ????, то lim????→∞ ????(????) = 0. Положение равновесия ???? * = 0 называется глобально асимптотически устойчивым, если для любых начальных данных ????(0) выполнено lim????→∞ ????(????) = 0. |
Линеаризацией называется метод приближённого представления нелинейных систем, при котором исследование нелинейной системы заменяется анализом линейной системы, в некотором смысле эквивалентной исходной. Путем замены координат ∆ = ???? − ???? можно получить линейный аналог исходной нелинейной системы:
В качестве точки ???? будем выбирать положения равновесия нелинейной системы и каждую полученную линейную систему будем исследовать на устойчивость. Если вектор функция то:
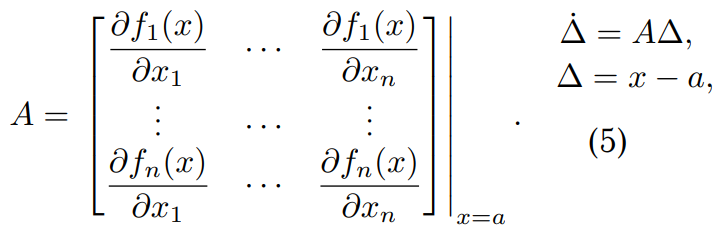 | Имеет место следующая теорема. Пусть ???? – положение равновесия нелинейной системы (4), а (5) - линеаризованная возле этого положения равновесия система. Обозначим ????(????) = max Re(????(????)). Тогда |
Для системы второго порядка
: x1 x2
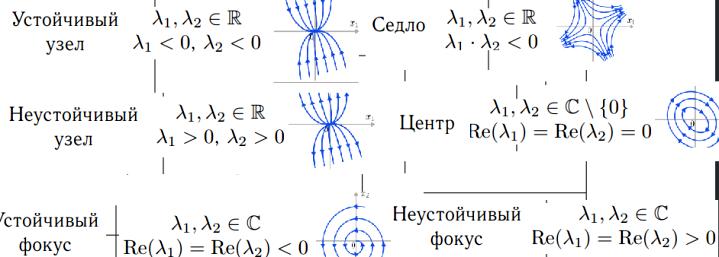 | Вблизи точек равновесия «нелинейная система»≡«линейная система» Если линеаризованная возле положения равновесия система ∆ = ˙ ????∆ имеет фокус, узел или седло, то исходная система ????˙ = ????(????) имеет тот же тип точки равновесия. Если линеаризованная система имеет центр, то нелинейная система имеет либо центр, либо фокус. |
ПРЕЗЕНТАЦИЯ - КУДА ВРАЩЕНИЕ
Страница 67 - линейные матричные неравенства. Важно.
АНАЛИЗ ГЛОБАЛЬНОЙ УСТОЙЧИВОСТИ
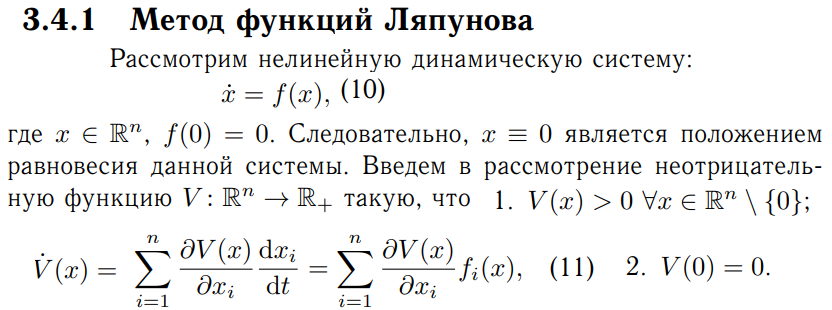
Имеет место следующая теорема. Если существует функция Ляпунова ???? (????) такая, что ????˙ (????) < 0 ∀???? ∈ R ???? ∖ {0}, то положение равновесия ???? * ≡ 0 нелинейной системы (10) является глобально асимптотически устойчивым. Если существует функция Ляпунова ???? (????) такая, что ????˙ (????) ≤ 0 ∀???? ∈ Ω ⊂ R ????, то положение равновесия ???? * ≡ 0 нелинейной системы (10) является локально устойчивым в области Ω.

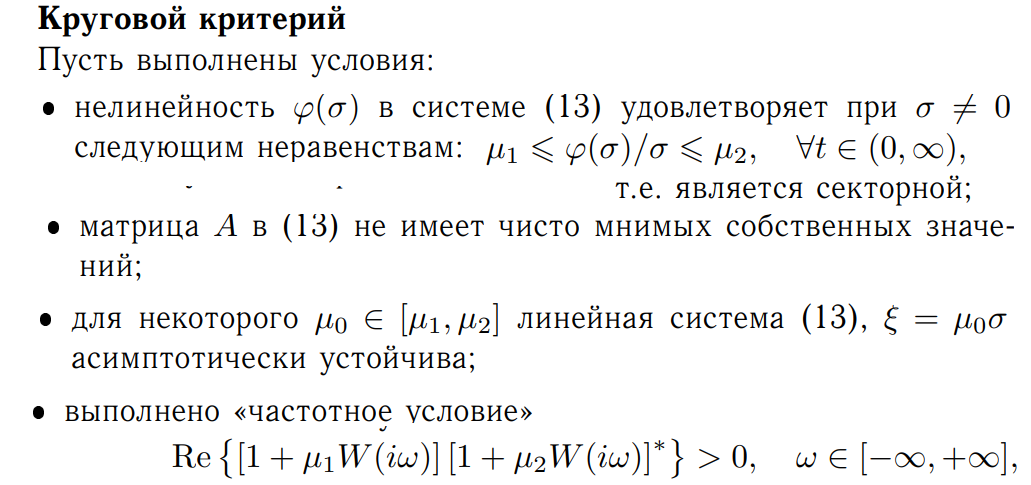
Причем первый критерий (круговой критерий) устанавливает так называемую экспоненциальную устойчивость нулевого решения. Определение экспоненциальной устойчивости следующее.
Если ∃ ???? > 0, ???? > 0 такие, что ∀????(????) системы (13) и ∀???? > ????0 выполнено ‖||????(????)|‖ ≤ ????‖||????(????0)‖???? −????(????−????0)|| , то нулевое решение системы (13) является экспоненциально устойчивым. Это определение означает, что любое решение системы стремится к нулю с экспоненциальной скоростью.