Файл: Курсовой проект по Теории электропривода статические и динамические характеристики электроприводов подпись, дата.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 27.03.2024
Просмотров: 28
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.


Найдем ток, протекающий через двигатель при таком моменте:
 .
.Найдем параметры резистора при ЭДТ:

Уравнение электромеханической характеристики при ЭДТ :

1.6.2. Построим характеристику динамического торможения (ЭДТ 2) =f(I), по условию максимального тока Iдоп=2,5Iн; JΣ=Jдв.
Максимальный ток якоря:
 .
.Найдем параметры тормозного резистора:
 .
.Характеристика ЭДТ может быть построена по двум точкам:
-
I=0 А; ω= 0 рад/с. -
I= -Iпуск = -545 А; ωперех= 158,6 рад/с.
Уравнение электромеханической характеристики при ЭДТ 2 :

По результатам, полученным в этих пунктах, построим характеристики ЭДТ 1 и ЭДТ 2 двигателя (рисунок 8).

Рисунок 8. Электромеханические характеристики ЭДТ.
1.7. Исследование двухмассовой ЭМС.

Рисунок 9. Схема двухмассовой ЭМС.
Здесь Мс1=0; J1=Jдв=3,1 кг·м2; J2=2,7Jдв= 8,37 кг·м2;
 ; Mс2=Mс
; Mс2=Mс Жесткость упругой механической связи можно рассчитать из следующего соотношения:

Рисунок 10. Структурная схема двухмассовой ЭМС.
Передаточная функция модели:

Амплитудно-фазовая частотная характеристика:

Амплитудная частотная характеристика:

По полученному уравнению строим АЧХ при воздействии возмущения на вал механизма (рисунок 11).
АЧХ показывает, что при малых частотах воздействия момента амплитуда скорости стремится к бесконечности и при дальнейшем увеличении ω амплитуда резко падает. Но при подходе ω к частоте собственных колебаний двухмассовой системы Ω12=1 рад/с амплитуда резко возрастает и устремляется к бесконечности. При дальнейшем увеличении частоты амплитуда резко падает и приближается к 0.
Таким образом, двухмассовая система вызывает дополнительные нагрузки, и даже без зазора вызывает резонанс.

Рисунок 11. Амплитудно-частотная характеристика двухмассовой ЭМС.
1.8. Механическая характеристика разомкнутой системы УП-Д.

Рисунок 12. Схема включения системы УП-Д.
1.8.1. Механическая характеристика разомкнутой системы УП-Д, для eп=220 В и внутреннем сопротивлении управляемого преобразователя rп=1,8∙rдв75= 0,083 Ом.
Уравнение механической характеристики в общем виде:
 .
.При М=0:
 .
.При М=Mн=IнkФн =218·1,337=291,5 Н·м:
 .
.Уравнение механической характеристики:

Строим график механической характеристики в режиме УП-Д при eп=220 В (рисунок 13).
1.8.2. Механическая характеристика разомкнутой системы УП-Д, для eп=110 В и внутреннем сопротивлении управляемого преобразователя rп=1,8∙rдв75=0,083 Ом.
Уравнение механической характеристики в общем виде:
.При М=0:
 .
.При М=Mн= Mс=230 Н·м:
 .
.Уравнение механической характеристики:

Строим график механической характеристики в режиме УП-Д при eп=110 В (рисунок 13).

Рисунок 13. Механическая характеристика разомкнутой системы УП-Д
УП-Д
II. РАСЧЕТ ЭЛЕКТРОПРИВОДА С АСИНХРОННЫМ ДВИГАТЕЛЕМ.
| Типоразмер электродвигателя |  | Энергетические показатели |  |  | Механическая характеристика | Параметры схемы замещения, о.е | Момент инерции | ||||||||||||
| КПД % |  | mk |  |  |  |  |  |  |  | J, кг∙м3 | |||||||||
| Синхронная частота вращения 1500 об/мин | |||||||||||||||||||
| 4АНК280М4У3 | 160 | 92,5 | 0,88 | 330 | 300 | 2,0 | 2,6 | 10,7 | 3,3 | 0,024 | 0,12 | 0,028 | 0,14 | 0,65 | |||||

Таблица 2. Исходные данные (Вариант 1.3).
2.1. Определение параметров АД.
Номинальная скорость:

Номинальный момент на валу двигателя:

Номинальный электромагнитный момент:

Номинальное сопротивление ротора:

Номинальный фазный ток статора определяется по формуле:

Найдем сопротивления статора и ротора из относительных значений:




Значение реактивного сопротивления короткого замыкания:

Зная значения сопротивлений статора, ротора, короткого замыкания, уточняем значение максимального электромагнитного момента:


Таблица 3. Абсолютные значения сопротивлений.
 |  |  |  |  |
| 0,018 | 0,021 | 0,089 | 0,103 | 0,192 |
2.2. Расчет и построение механических и электромеханических характеристик
2.2.1. Естественные механические и электромеханические характеристики.
Расчет механической характеристики ведем по формуле Клосса:


Расчет электромеханической характеристики ведем в соответствии со схемой замещения асинхронного двигателя.

2.2.2. Реостатные механические и электромеханические характеристики.

Необходимое значение сопротивления найдем из условия:

где:



Расчет критического скольжения:

Расчет механической характеристики с введением добавочного сопротивления:

Расчет электромеханической характеристики:


Рисунок 14. Естественная и реостатная механические характеристики

Рисунок 15. Естественная и реостатная электромеханические характеристики
3.2.3. Пуск асинхронного двигателя в 3 ступени
Расчет пусковых сопротивлений производится аналитическим методом.
Зададимся значением переключающего момента:

Найдем соотношение пиков момента к моментам перекючения:

Проверяем пиковые моменты:

Определяем сопротивления цепей:



Сопротивления пускового реостата по ступеням:



Пусковая диаграмма приведена на рисунке 16.

Рисунок 16. Пусковая диаграмма
3.3. ПОСТРОЕНИЕ ГРАНИЧНЫХ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ ЧАСТОТНОМ РЕГУЛИРОВАНИИ С M=const В ДИАПАЗОНЕ 10:1
Приближенный закон регулирования напряжения при изменении частоты вытекает из формулы критического момента:

Выбирая соответствующие напряжения, следуя данному закону, строим механические характеристики для f=50 Гц, f=75 Гц и f=100 Гц по формулам:
 ,
,  ;
; Электромеханические характеристики построим по формулам:

Данные характеристики представлены на рисунках 17 и 18.
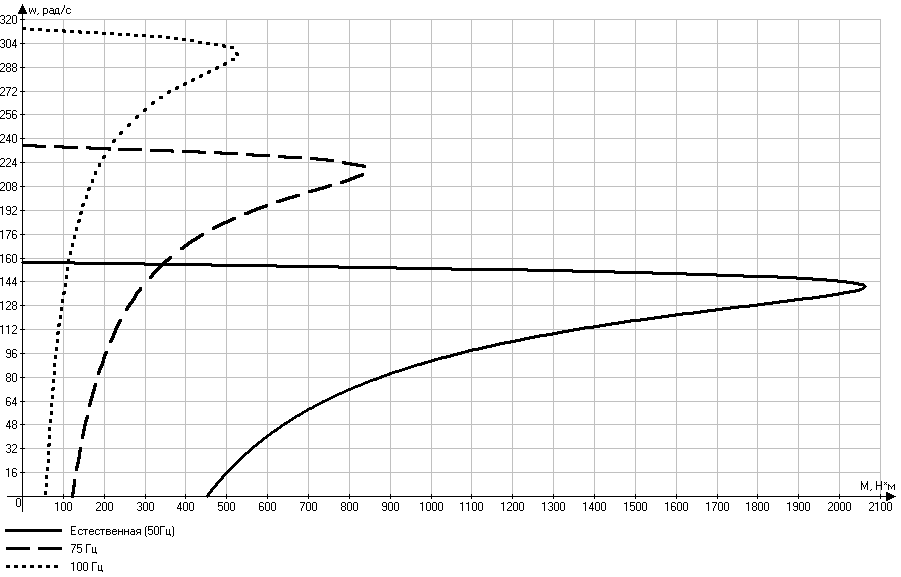
Рисунок 17. Механические характеристики частотного регулирования

Рисунок 18. Электромеханические характеристики при частотном регулировании
3.3. ПОСТРОЕНИЕ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ ИЗМЕНЕНИИ НАПРЯЖЕНИЯ.
Построим механические характеристики при изменении напряжения:
U1=Uном; U'1=0,7Uном; U''1=0,5Uном;
Для построения характеристик воспользуемся следующими формулами:


Построенная характеристика приведена на рисунке 19.

Рисунок 19. Электромеханические характеристики при изменении напряжения.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
-
Теличко Л.Я Методические указания к курсовому проекту по дисциплине «Теория электропривода». Липецк: ЛГТУ, 2001. 24 с. -
Вешеневский С.Н. Характеристики двигателей в электроприводе. М.: Энергия, 1977. 432с., ил. -
Москаленко В.В. Электрический привод - М.: Высшая школа, 1991. 430 с. -
Чиликин М.Г., Ключев В.И. Сандлер А.С. Теория автоматизированного электропривода. М.: Энергия, 1979.- 616с., ил. -
Ключев В.И., Терехов В.М. Электропривод и автоматизация общепромышленных механизмов. М.: Энергия, 1980. 360с., ил. -
Чиликин М.Г., Соколов М.М., Терехов В.М. Основы автоматизированного электропривода. М.: Энергия, 1974.- 568с., ил. -
Онищенко Г.Б. Электрический привод. М.: РАСХН, 2003.- 320с., ил.