ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.04.2024
Просмотров: 5
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Поурочный план
| Раздел: | Робототехника. | |
| ФИО педагога | Сейдахметова А.О | |
| Дата: | | |
| Класс: | Количество присутствующих: | Количество отсутствующих: |
| Тема урока | Гироскопический датчик | |
| Цели обучения в соответствии с учебной программой | 5.3.3.2 – создавать программы для поворота робота на заданные градусы | |
| Цели урока | - использовать гироскопический датчик для определения угла вращения робота - воспитание аккуратности и внимательности при выполнении работ с применением ПК, формирование у учеников навыков самоконтроля. | |
Ход урока
| Этап урока/ Время | Действия педагога | Действия ученика | Оценивание | Ресурсы | ||||||||||||||||
| Начало урока 0-5 мин | Психологический настрой на урок игра «Пожелание». | | | | ||||||||||||||||
| 5-8 мин | Задание на концентрацию внимания «Датчики». | Выполнение | Оценка | Презентация | ||||||||||||||||
| 8-15 мин | Формулировка темы и цели урока. Чтобы подвести учащихся к формулированию темы и целей урока, учитель организует интерактивую игру, в ходе которой ученики получают начальное представление о том, как какие датчики есть и различие других датчиков от гироскопических. После игры предлагаются вопросы для обсуждения ситуации:
Учащиеся формулирует тему и цели урока, которые представлены на слайде. | | | Презентация | ||||||||||||||||
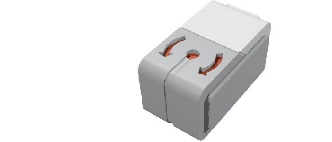
| Середина урока 15-25 мин | (Д) Учитель демонстрирует видеоролик о гироскопическом датчике Датчик предназначен для измерения угла или скорости вращения робота. Отличительной особенностью гироскопического датчика является наличие на верхней панели круга и двух стрелок, передняя панель поделена линией на две части. Датчик двух оттенков серого цвета (светлого и темного), под стрелками можно увидеть красный цвет. (О) Учитель объясняет режимы гироскопического датчика.
движение вперед, один оборот На самом деле, если вы робот, то лабиринт для вас будет выглядеть вот так. 
Гироскопический датчик и модуль EV3 должны быть неподвижны при подсоединении кабеля и во время запуска модуля EV3. Создайте свою программу Воссоздайте показанную программу и загрузите ее в своего робота. 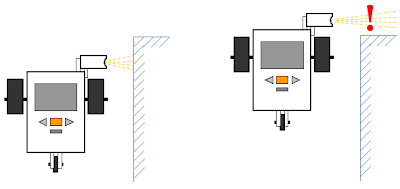 Сводка программы Старт Независимое управление моторами – Мощность B[10], Мощность C[-10] Ожидание – Гироскопический датчик – Сравнить угол – Тип[3] (Больше чем или равно), Градусы [90] Независимое управление моторами – Выкл Устранение неполадок Требуется корректировка угла – как правило, значение должно быть меньше 90 градусов. Теория При использовании гироскопического датчика значение оборотов, записанное в блоке датчика, соответствует повороту приводной платформы. Точность датчика составляет +/- 3 градуса. Мертвый ход мотора и задержка, вызванная прекращением действия вращающего момента, также могут повлиять на точность. Такие факторы, как мощность батареи, размер колес, трение робота о поверхность, расстояние между двумя колесами, больше не влияют на точность поворота робота. Програмный блок команд:
| Учащимся которые затрудняются в выполнении самостоятельных заданий, учитель оказывает помощь. | Оценка | Презентация | ||||||||||||||||
| 25-28 мин | Физминутка. Учащиеся под музыкальное сопровождение на слайде выполняют упражнения. Можно выбрать одного ученика, который будет показывать движения. | | | | ||||||||||||||||
| 28-35 мин | (И) Индивидуальная работа на закрепление материала. Выполнение заданий по карточкам. Задание №1. Заполнить таблицу.
| Интерактивное обучение. | Оценка | | ||||||||||||||||
| 35-38 мин | (П, ФО) Взаимооценивание в парах работ по образцу на слайде с использованием дескрипторов.
| Дифференциация в последовательном выполнении заданий | Оценка | | ||||||||||||||||
| Конец урока 38-40 мин | Рефлексия и изменение Измените свою программу таким образом, чтобы робот выполнил следующие повороты на месте: Выполнил поворот на месте по часовой стрелке на 45 градусов. Выполнил поворот на месте по часовой стрелке на 180 градусов. Выполнил поворот на месте по часовой стрелке на 360 градусов, а затем против часовой стрелки на 360 градусов. | | | | ||||||||||||||||
| | | | | | ||||||||||||||||
| Дифференциация – каким образом Вы планируете оказать больше поддержки? Какие задачи Вы планируете поставить перед более способными учащимися? | Оценивание – как Вы планируете проверить уровень усвоения материала учащимися? | Здоровье и соблюдение техники безопасности | | | ||||||||||||||||
| Дифференцированные задания на этапе закрепления материала. | Формативное оценивание, взаимооценивание учащихся в парах по критериям. Обратная связи после каждого этапа урока. Рефлексия «Лестница успеха». | Повторение правил техники безопасности и правил эргономики. | | |
 рограмму гироскопического датчика
рограмму гироскопического датчика 
 Порт подключения датчика
Порт подключения датчика