Файл: 10. Вычисление и построение главного вектора и главного момента.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.04.2024
Просмотров: 9
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

10. Вычисление и построение главного вектора и главного момента
Выбираем систему координатных осей Oxyz (рис. 48) и вычисляем проекции главного вектора как алгебраические суммы проекций всех заданных сил на выбранные оси:
Рис. 48.
По найденным проекциям, откладывая соответствующие отрезки вдоль координатных осей (с учетом знака проекции), строим прямоугольный параллелепипед. Направленная диагональ, проведенная из начала координат в противоположную вершину параллелепипеда, определяет главный вектор R (см. также рис. 26).
Модуль и направляющие косинусы главного вектора определяются следующими вытекающими из построения формулами:

Совершенно аналогично определяются проекции, модуль и направляющие косинусы главного момента:
К формулам для вычисления проекций главного момента необходимо привести следующие пояснения.
Главный момент, по определению, есть векторная сумма моментов всех сил
Но эти величины, по определению момента силы относительно оси, являются моментами сил относительно соответствующих координатных осей:

Отсюда непосредственно следуют написанные выше выражения для величин
.
Косинус угла
Формула получается следующим образом. По определению скалярного произведения векторов R и
С другой стороны, эта же величина может быть вычислена через проекции векторов-сомножителей:
Приравнивая правые части и разрешая полученное уравнение относительно coscp, приходим к написанной формуле.
Условия равновесия произвольной плоской системы сил. Случай параллельных сил.
Для равновесия любой плоской системы сил необходимо и достаточно, чтобы одновременно выполнялись условия: R = 0, M0 = 0.
Здесь О - любая точка плоскости.
Найдем вытекающие из равенств аналитические условия равновесия.
Величины R и Мо определяются равенствами:

Равенства выражают, следующие аналитические условия равновесия: для равновесия произвольной плоской системы сил, необходимо и достаточно, чтобы суммы проекций всех сил на каждую из двух координатных осей и сумма их моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю.
Теорема о трех моментах. Для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы моментов этих сил системы относительно трех любых точек, расположенных в плоскости действия сил и не лежащих на одной прямой, были равны нулю.
Равновесие плоской системы параллельных сил.
В случае, когда все действующие на тело силы параллельны друг другу, мы можем направить ось Ох перпендикулярно к силам, а ось Оу параллельно им (рис. 29). Тогда проекция каждой из сил на Oxбудет равна нулю и первое из 3-х равенств обратится в тождество вида 0 = 0. В результате для параллельных сил останется два условия равновесия:
Где ось Оу параллельна силам.
11. Равновесие тела при наличии трения скольжения
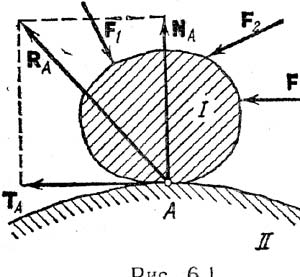
Если два тела I и II (рис. 6.1) взаимодействуют друг с другом, соприкасаясь в точке А, то всегда реакцию RA, действующую, например, со стороны тела II и приложенную к телу I, можно разложить на две составляющие: NA, направленную по общей нормали к поверхности соприкасающихся тел в точке А, и ТА, лежащую в касательной плоскости. Составляющая NAназывается нормальной реакцией, сила ТА называется силой трения скольжения — она препятствует скольжению тела I по телу II. В соответствии с аксиомой 4 (третьим законом Ньютона) на тело II со стороны тела I действует равная по модулю и противоположно направленная сила реакции. Ее составляющая, перпендикулярная касательной плоскости, называется силой нормального давления. Сила трения ТА = 0, если соприкасающиеся поверхности идеально гладкие. В реальных условиях поверхности шероховаты и во многих случаях пренебречь силой трения нельзя. Максимальная сила трения приближенно пропорциональна нормальному давлению, т. е. Tmax=fN. (6.3)– закон Амонтона—Кулона. Коэффициент f называется коэффициентом трения скольжения. Его значение не зависит от площади соприкасающихся поверхностей, но зависит от материала и степени шероховатости соприкасающихся поверхностей. Силу трения можно вычислить по ф-ле T=fN только если имеет место критический случай. В других случаях силу трения следует определять из ур-ий равнов. На рисунке показана реакция R (здесь активные силы стремятся сдвинуть тело вправо). Угол j между предельной реакцией R и нормалью к поверхности называется углом трения. tgj=Tmax/N=f.
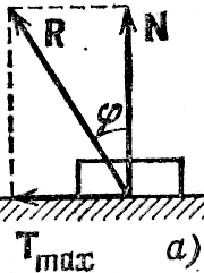
Геометрическое место всех возможных направлений предельной реакции R образует коническую поверхность — конус трения (рис. 6.6, б). Если коэффициент трения f во всех направлениях одинаков, то конус трения будет круговым. В тех случаях, когда коэффициент трения f зависит от направления возможного движения тела, конус трения не будет круговым. Если равнодействующая активных сил. находится
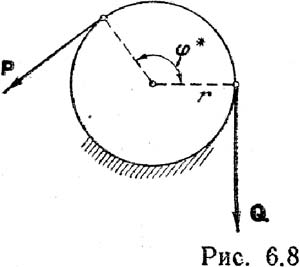
внутри конуса трения, то увеличением ее модуля нельзя нарушить равновесие тела; для того чтобы тело начало движение, необходимо (и достаточно), чтобы равнодействующая активных сил F находилась вне конуса трения. Рассмотрим трение гибких тел (рис.6.8). Формула Эйлера помогает найти наименьшую силу P, способную уравновесить силу Q. P=Qe-fj*. Можно так же найти такую силу P, способную преодолеть сопротивление трения вместе с силой Q. В этом случае в формуле Эйлера поменяется только знак f: P=Qefj*.
Равновесие при наличии трения скольжения
При скольжении тела по шероховатой поверхности возникает сила реакции, которая имеет две составляющие – нормальную и силу трения скольжения (рисунок 2.1). Сила трения скольжения, приложенная к одному из трущихся тел, направлена противоположно его скорости относительно второго тела.
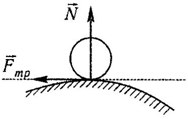
Рисунок 2.1
В результате экспериментальных исследований были установлены законы Амонтона-Кулона:
1) сила трения скольжения находится в общей касательной плоскости соприкасающихся поверхностей тел и направлена в сторону, противоположную направлению возможного скольжения тела под действием активных сил. Величина силы трения зависит от активных сил и заключена между нулем и своим максимальным значением, которое достигается в момент выхода тела из положения равновесия (0 ≤ Fтр ≤ Fтрmax );
2) максимальное значение силы трения скольжения не зависит от площади контакта, а определяется величиной нормальной реакции, материалом и состоянием контактирующих поверхностей;
Fтрmax = fN,
где f – коэффициент трения скольжения, который является безразмерной величиной и зависит от материала и физического состояния трущихся поверхностей, а также от скорости движения тела и удельного давления.

