Файл: 10. Вычисление и построение главного вектора и главного момента.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.04.2024
Просмотров: 10
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Экспериментально установлено, что f < fсц.
Рассмотрим твердое тело на шероховатой поверхности (рисунок 2.2), находящееся под действием активных сил в предельном состоянии равновесия, т.е. когда сила трения достигает своего наибольшего значения при данном значении нормальной реакции.
В этом случае полная реакция шероховатой поверхности отклонена от нормали к общей касательной плоскости трущихся поверхностей на наибольший угол (Rmax ). Этот наибольший угол между полной реакцией, построенной на наибольшей силе трения при данной нормальной реакции и направлением нормальной реакции, называется углом трения φ:
tgφ = Fтрmax/N = fN/N = f.
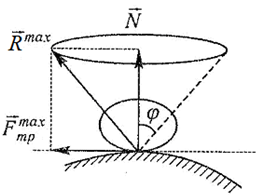
Рисунок 2.2
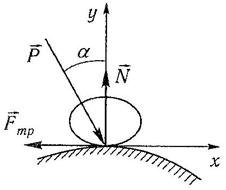
Рисунок 2.3
Конус трения – поверхность, образованная линией действия максимальной реакции опорной поверхности при движении тела в различных направлениях (рисунок 2.2).
При равновесии тела на шероховатой поверхности под действием силы P (рисунок 2.3) можно составить два уравнения равновесия:
ΣFkx = 0; Psinα - Fтр = 0;
ΣFky = 0; - Pcosα + N = 0.
Следовательно,

Для равновесия тела на шероховатой поверхности необходимо и достаточно, чтобы линия действия равнодействующей активных сил, действующих на тело, проходила внутри конуса трения или по его образующей через его вершину.
Никакая сила, лежащая внутри конуса трения, не может вывести тело из состояния равновесия.
Трением качения называется сопротивление, возникающее при качении одного тела по поверхности другого. Вследствие деформации тел их касание происходит вдоль площадкиAB (рисунок 2.4, а), появляется распределенная система сил реакции (рисунок 2.4, б), которая может быть заменена силой и парой (рисунок 2.4, в).
Сила раскладывается на две составляющие – нормальную и силу трения скольжения. Пара сил называется моментом сопротивления качению Mc.
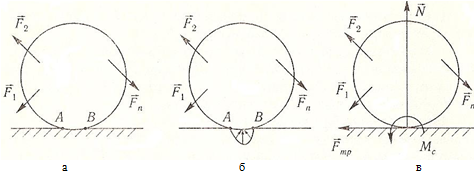
Рисунок 2.4
При равновесии тела момент сопротивления качению определяется из условий равновесия системы сил. При этом установлено, что момент сопротивления принимает значения от нуля до максимального значения. Максимальное значение момента сопротивления, соответствующее началу качения, определяется равенством
Mcmax = Nδ,
где δ – коэффициент трения качения, имеет размерность длины [м], зависит от материала контактирующих тел и геометрии зоны контакта.
Различают:
чистое качение – точка A (рисунок 2.4) не скользит по неподвижной плоскости;
качение со скольжением – наряду с вращением катка присутствует и проскальзывание в месте контакта, т.е. точка A движется по плоскости;
чистое скольжение – каток движется по плоскости, не имея вращения (см. п.2.1).
Для того, чтобы каток не скользил, необходимо условие Fтр < Fтр max
Также существует трение верчения – когда активные силы стремятся вращать тело вокруг нормали к общей касательной поверхности соприкосновения.
12. Приведение плоской системы параллельных сил к центру
Т
 еорема о приведении системы сил:
еорема о приведении системы сил:Любая система сил, действующих на абсолютно твердое тело, может быть заменена одной силой R, равной главному вектору этой системы сил и приложенной к произвольно выбранному центру О, и одной парой сил с моментом LO, равным главному моменту системы сил относительно центра О.
Такая эквивалентная замена данной системы сил силой R и парой сил с моментом LO называютприведением системы сил к центу О.
Рассмотрим приведение плоской системы параллельных сил к центру О, лежащему в той же плоскости (одну из координатных осей, например, ось Oy, целесообразно направить вдоль направления действия сил). В этом случае система сил заменяется одной силой и одной парой сил, лежащих в плоскости действия сил системы. Момент этой пары сил можно рассматривать как алгебраическую величину LO и изображать на рисунках дуговой стрелкой ( алгебраический главный момент плоской системы сил ).
В результате приведения плоской системы параллельных сил к центру возможны следующие случаи:
-
если R = 0, LO = 0, то заданная система является равновесной; -
если хотя бы одна из величин R или LO не равна нулю, то система сил не находится в равновесии.
При этом:
-
Eсли R = 0 и LO 0, то система сил приводится к одной паре сил с моментом LO, причем в этом случае величина момента LOне зависит от выбора центра О.
0, то система сил приводится к одной паре сил с моментом LO, причем в этом случае величина момента LOне зависит от выбора центра О. -
Eсли R 0, то при любом значении LO система сил приводится к равнодействующей силе, линия действия которой параллельна линиям действия сил системы.
В
 практических задачах статики часто встречаются плоские системы параллельных сил, распределенных по некоторому закону вдоль отрезка прямой (например, вдоль прямолинейного стержня).
практических задачах статики часто встречаются плоские системы параллельных сил, распределенных по некоторому закону вдоль отрезка прямой (например, вдоль прямолинейного стержня).
Плоская система распределенных сил характеризуется ее интенсивностью q, равной величине силы, приходящейся на единицу длины нагруженного отрезка. В общем случае интенсивность является некоторой функцией q(x) координаты x, отсчитываемой вдоль нагруженного отрезка.
Интенсивность измеряется в системе единиц СИ в ньютонах, деленных на метры (Н · м).
Центр параллельных сил
Рассмотрим систему параллельных сил {F1, F2, ..., Fn}. При повороте всех сил системы на один и тот же угол линия действия равнодействующей системы параллельных сил повернется в ту же сторону на тот же угол вокруг некоторой точки (рисунок 1.5, а).
Эта точка называется центром параллельных сил.
Согласно теореме Вариньона, если система сил имеет равнодействующую, то ее момент относительно любого центра (оси) равен сумме моментов всех сил системы относительно того же центра (оси).
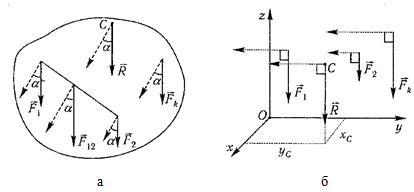
Рисунок 1.5
Для определения координат центра параллельных сил воспользуемся этой теоремой.
Относительно оси x
Mx(R) = ΣMx(Fk), - yCR = ΣykFk и yC = ΣykFk /ΣFk.
Относительно оси y
My(R) = ΣMy(Fk), - xCR = ΣxkFk и xC = ΣxkFk /ΣFk.
Чтобы определить координату zC, повернем все силы на 90° так, чтобы они стали параллельны оси y (рисунок 1.5, б). Тогда
Mz(R) = ΣMz(Fk), - zCR = ΣzkFk и zC = ΣzkFk /ΣFk.
Следовательно, формула для определения радиус-вектора центра параллельных сил принимает вид
rC = ΣrkFk /ΣFk.
Свойства центра параллельных сил:
1 Сумма моментов всех сил Fk относительно точки C равна нулю
ΣMC(Fk) = 0.
2 Если все силы повернуть на некоторый угол α, не меняя точек приложения сил, то центр новой системы параллельных сил будет той же точкой C.
13. Центр тяжести твердого тела; центр тяжести объема, площади и линии. Способы определения положения центров тяжести тел.
Центром тяжести твердого тела называется геометрическая точка, жестко связанная с этим телом, и являющаяся центром параллельных сил тяжести, приложенных к отдельным элементарным частицам тела (рисунок 1.6).
Радиус-вектор этой точки


Рисунок 1.6
Для однородного тела положение центра тяжести тела не зависит от материала, а определяется геометрической формой тела.
Если удельный вес однородного тела γ, вес элементарной частицы тела
Pk = γΔVk (P = γV) подставить в формулу для определения rC, имеем

Откуда, проецируя на оси и переходя к пределу, получаем координаты центра тяжести однородного объема
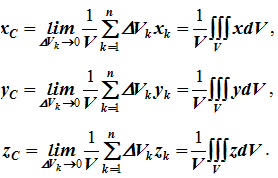
Аналогично для координат центра тяжести однородной поверхности площадью S (рисунок 1.7, а)
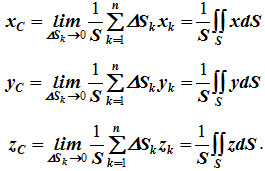
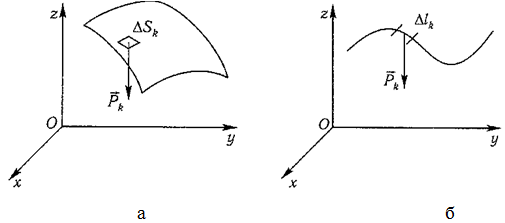
Рисунок 1.7
Для координат центра тяжести однородной линии длиной L (рисунок 1.7, б)
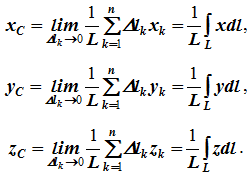
Способы определения координат центра тяжести
Исходя из полученных ранее общих формул, можно указать способы определения координат центров тяжести твердых тел:
1 Аналитический (путем интегрирования).

