ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 29
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

свМоделирование в ПО SamSim
-
ПИ-регуляторы
-
Последовательное соединение звеньев

Последовательное соединение звеньев (пропорциональное и изодромное) при моделировании в ПО SamSim представляется интегральным и упреждающим (форсирующим) -W2(p) звеньями. Местами не переставлять!!!
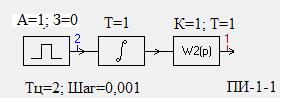
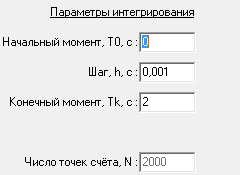
Рисунок 1.1 - Схема модели регулятора и параметры интегрирования
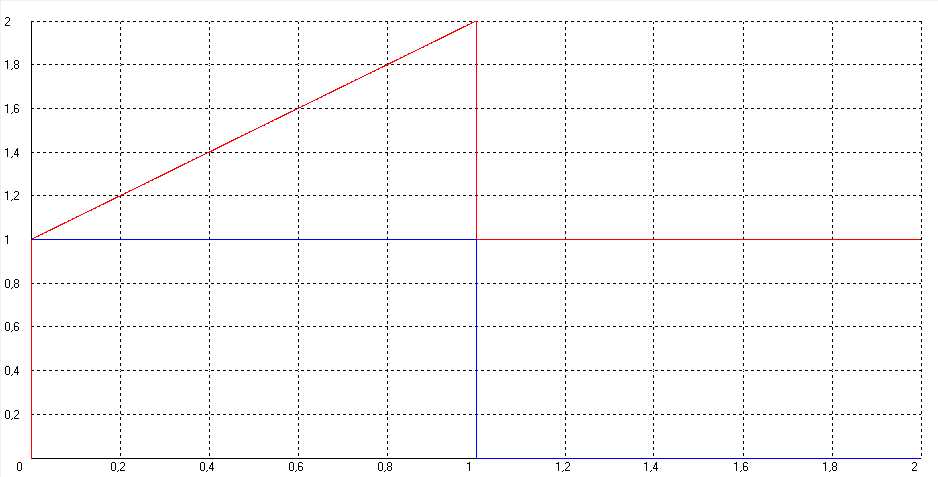
Рисунок 1.2 – Осциллограммы сигналов
-
Параллельное соединение звеньев

При параллельном соединении ПИ регулятор представлен пропорциональным и интегральными звеньями
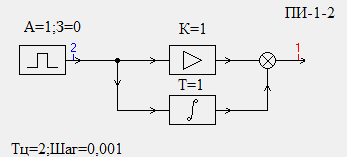
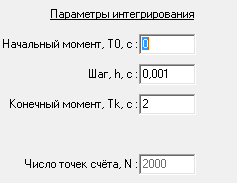
Рисунок 1.3- Схема модели регулятора и параметры интегрирования

Рисунок 1.4 – Осциллограммы сигналов
1.3 Оба варианта
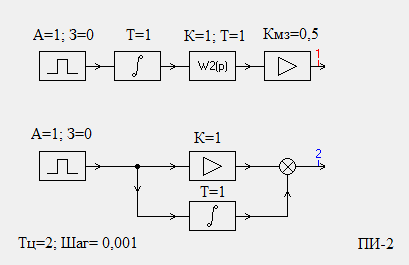
Рисунок 1.5- Схемы моделей регуляторов
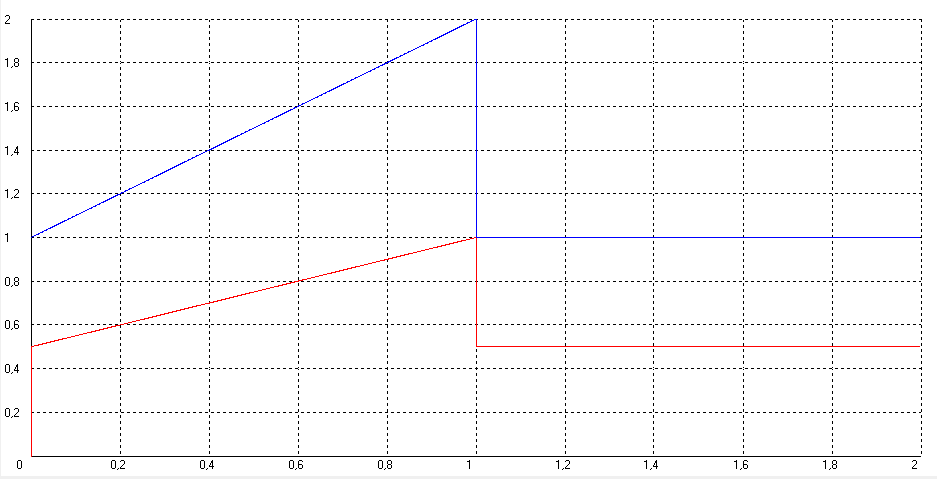
Рисунок 1.6-Осциллограммы выходных сигналов регуляторов
Вывод: Осциллограммы совпали (с учетом Кмз=0,5), поэтому ПИ – регулятор можно моделировать как последовательным, так и параллельным соединениям звеньев!!!
-
Оптимизация контура на модульный оптимум (МО), объект которого содержит большую и малую инерционности.
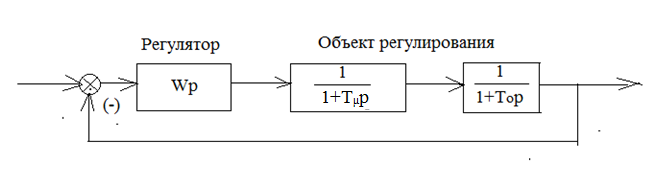
Рисунок 2.1- Структурная схема контура регулирования

 =
=  =
= 

 =
=  .
.Примем То=0,025 с, Тµ= 0,005 с.
Тогда
 .
.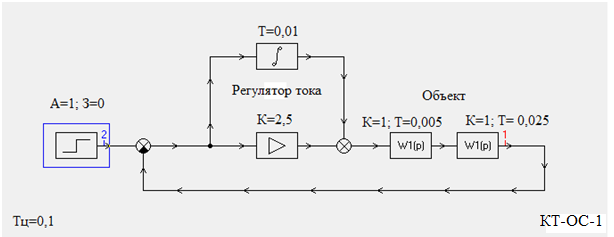
Рисунок 2.2-Схема модели контура с большой и малой постоянными времени в объекте

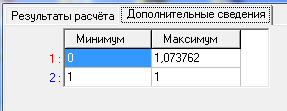
Рисунок 2.3- Осциллограммы сигналов и таблица результатов расчета
(Тц=0,1 с; шаг=0,001с; δ=7,4% )
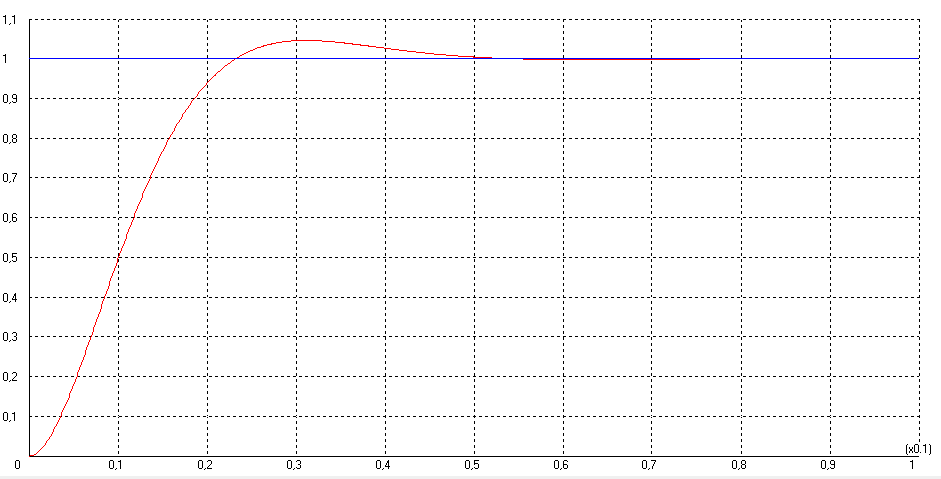
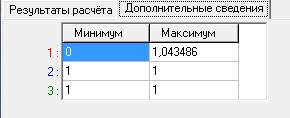
Рисунок 2.4- Осциллограммы сигналов и таблица результатов расчета
(Тц=0,1 с; шаг=0,00001с; δ=4,3%)
Вывод. При шаге интегрирования в 0,00001с перерегулирование соответствует настройке на модульный оптимум (δ=4,3%). Т.к. в ПО SamSim рекомендуется иметь не более 10000 шагов интегрирования, а надо моделировать процессы длительностью до 10 с, то поэтому шаг интегрирования примем 0,001 с (принимая во внимание небольшую ошибку моделирования).
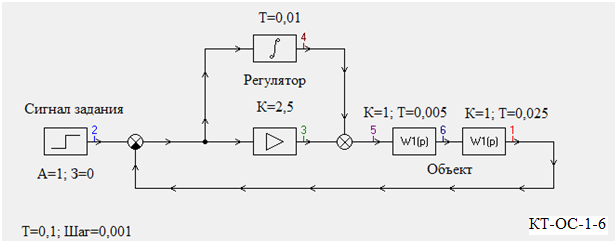
Рисунок 2.5 -Схема модели контура с большой и малой постоянными времени в объекте (контрольные точки у каждого звена)
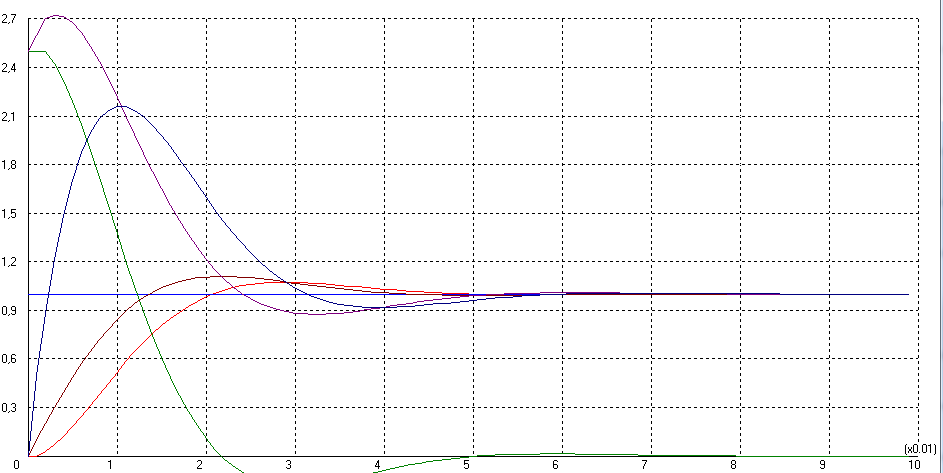
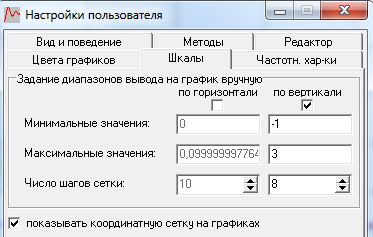

Рисунок 2.6 – Осциллограммы сигналов всех звеньев контура и настройка шкалы по У
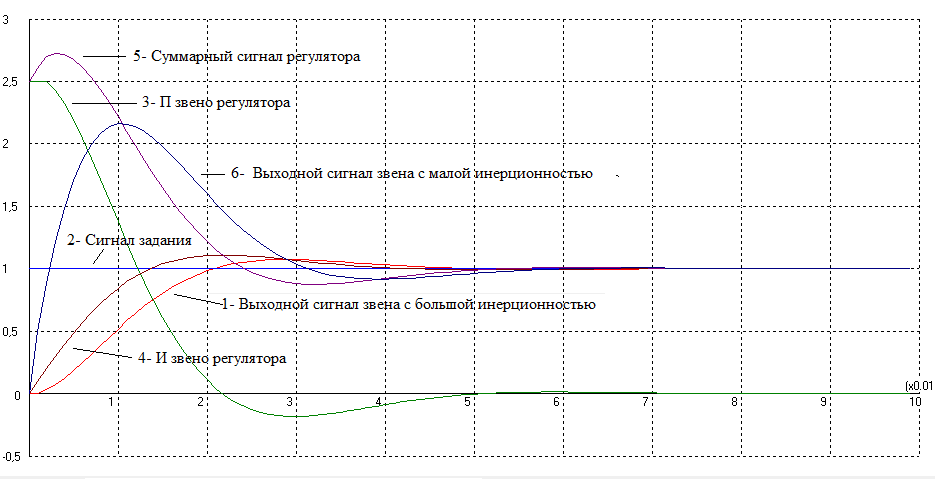
Рисунок 2.7- Осциллограммы сигналов всех звеньев контура
Анализ осциллограмм.
Пропорциональное звено регулятора при подаче скачка задающего сигнала изменяет свой сигнал мгновенно, далее сигнал снижается с перерегулированием, (принимая отрицательные значения, когда выходной сигнал превышает заданное значение) и в установившемся режиме становиться равным нулю.
Интегральное звено регулятора, изменяясь монотонно, с перерегулированием выходит на уровень сигнала задания.
Суммарный сигнал регулятора в первый момент изменяется скачком (как и пропорциональная часть), далее немного увеличившись (все это и есть форсировка), начинает уменьшаться и с перерегулированием выходит на тот же уровень, что и интегральная часть.
Выходной сигнал звена с малой инерционностью с перерегулированием (форсировкой) выходит на тот же уровень, что и интегральная часть.
Выходной сигнал звена с большой инерционностью выходит на заданный уровень с перерегулированием в 4,3% (согласно настройке на МО).
Отметим, что инерционности объекта данного контура совпадают с инерционностями реального контура тока. Отличие - в коэффициентах усиления звеньев и канала обратной связи (они не равны единице).
-
Реальный контур тока
-
Контур тока при заторможенном двигателе
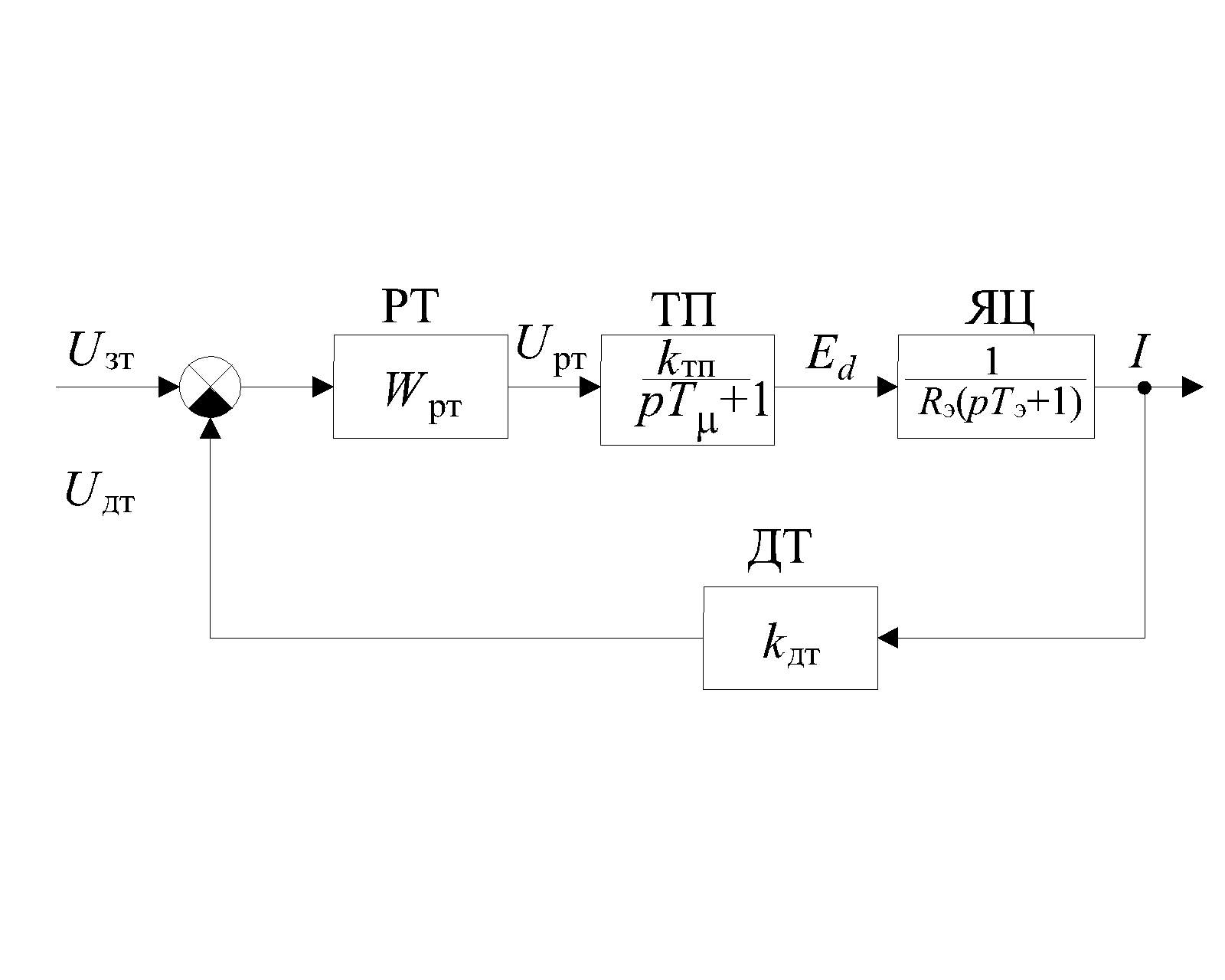
Рисунок 3.1 –Структурная схема контура тока заторможенного двигателя
Передаточные функции звеньев контура тока.
Тиристорный преобразователь
 – апериодическое звено с малой постоянной времени
– апериодическое звено с малой постоянной времениЯкорная цепь
 – апериодическое звено с большой постоянной времени
– апериодическое звено с большой постоянной времениДатчик тока
 – пропорциональное звено
– пропорциональное звеноДля настройки контура тока на модульный оптимум передаточную функцию разомкнутого контура следует устремить к последовательному соединению интегрирующего звена с удвоенной малой постоянной времени (2Тμ) и апериодического звена с малой постоянной времени (Тμ).
 .
.В результате получаем регулятор тока ПИ – типа с передаточной функцией:
 ,
,где:
 – коэффициент пропорционального усиления, а
– коэффициент пропорционального усиления, а  – изодромная часть регулятора тока.
– изодромная часть регулятора тока.Приведенная передаточная функция соответствует представлению регулятора тока в виде последовательно-включенных пропорционального и изодромного звеньев. Если регулятор представить в виде паралельно-включенных звеньев (так на практике они реализованы в микропроцессорных системах регулирования) , то передаточная функция примет вид:
 ,
,где
 - коэффициент пропорционального усиления, а Трт –постоянная времени интегрального звена регулятора тока.
- коэффициент пропорционального усиления, а Трт –постоянная времени интегрального звена регулятора тока. На рис.3.2 приведена схема модели контура тока заторможенного двигателя в ПО SamSim.
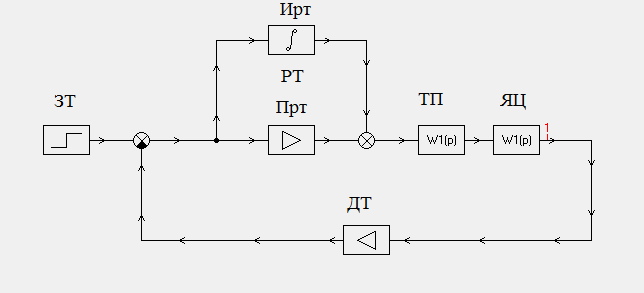
Рисунок 3.2- схема модели контура тока заторможенного двигателя двигателя с регулятором тока в виде паралельно-включенных пропорциональнного и интегрального звеньев в ПО SamSim.
Определим параметры звеньев для численного примера (Рн= 10 кВт; Uн=220 В; Iн=50 А; Iмакс=2Iн=100А; nн= 1000 об/мин; Rа=0,2 Ом; Rэ =0,4 Ом;
Еd0= 269 В; Тэ = 0,025 с; Тм=0,04 с; Тμ = 0,005 с):
-
Тиристорный преобразователь.

-
Якорная цепь двигателя.

-
Датчик тока
-
Регулятор тока. ;
;
 .
.Передаточная функция замкнутого контура тока

где
 - эквивалентная постоянная времени оптимизированного на модульный оптимум контура тока.
- эквивалентная постоянная времени оптимизированного на модульный оптимум контура тока.В установившемся режиме:
 →
→  .
.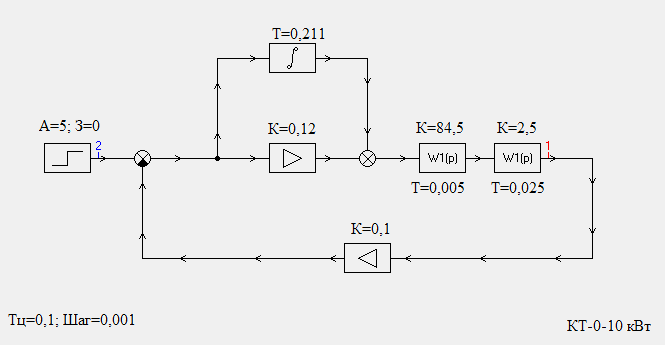
Рисунок 3.3 - Схема модели замкнутого контура тока заторможенного двигателя с числовыми параметрами звеньев в ПО SamSim

Рисунок 3.4 – Осциллограмма тока на выходе заторможенного контура тока двигателя при отработки скачка задающего сигнала (Uзт=5В), соответствующего номинальному значению.
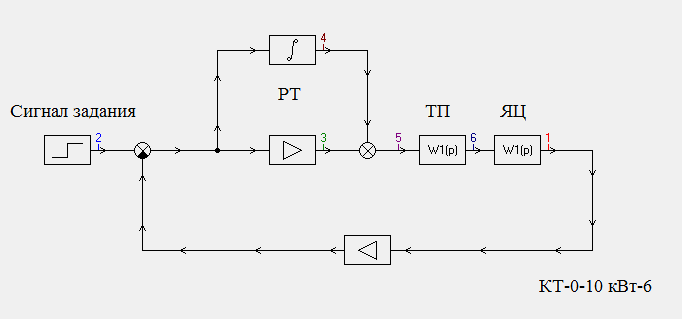
Рисунок 3.5 - Схема модели замкнутого контура тока заторможенного двигателя с контрольными точками у каждого звена в ПО SamSim
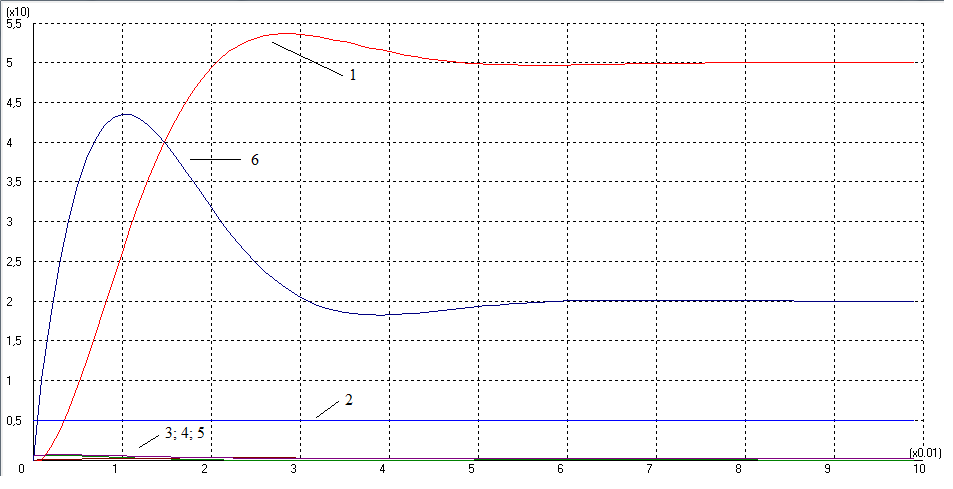
Рисунок 3.6- Осциллограммы сигналов всех звеньев контура при отработке скачка задающего сигнала
Недостаток- сигналы регулятора тока существенно меньше сигналов тиристорного преобразователя и выходного тока, поэтому «сливаются» с осью времени. Для наблюдения этих сигналов необходимо поставить масштабирующие звенья (масштабирующие усилители).
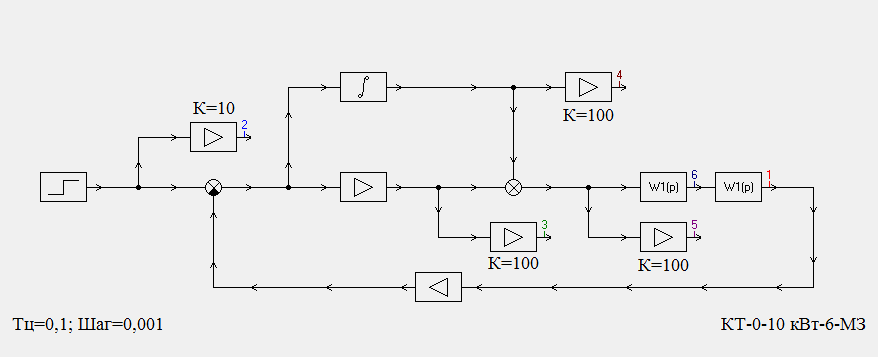
Рисунок3.7 - Схема модели контура тока с масштабирующими
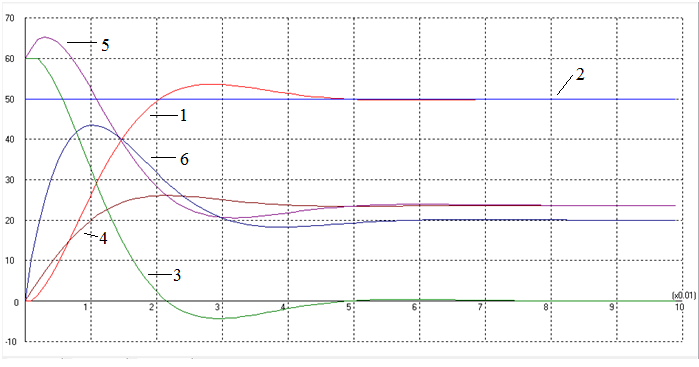
Рисунок 3.8. Сигналы всех звеньев при отработке скачка задающего сигнала заторможенным контуром тока
Из анализа осциллограмм можно сделать следующие выводы.
Пропорциональная часть регулятора тока изменяет свой сигнал (3) скачком. В дальнейшем сигнал уменьшается до нуля с перерегулированием (в течение всего интервала перерегулирования выходного сигнала - тока якоря, этот сигнал будет отрицательным).