Файл: Назначение подъемных установок. История развития шахтного подъема.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 58
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
27. Тормозные устройства шахтных подъемных машин. Требования Правил безопасности к тормозным устройствам.
Виды тормозных устройств шахтных подъемных машин:
-
Пружинно-гидравлический привод тормоза; -
Пружинно-пневматический привод тормоза; -
Грузопневматический привод тормоза; -
Дисковые тормоза.
Большинство шахтных подъемных машин, эксплуатируемых на горных предприятиях РФ, снабжены тормозными устройствами колодочного типа. Привод тормозных устройств малых шахтных подъемных машин (диаметр барабанов 1,2, 1,6 и 2,0 м) – пружинно-гидравлический. Одно и двухбарабанные шахтные подъемные машины с диаметром барабана 2,5, 3,0 и 3,5 м, а также многоканатные машины оснащены пружинно-пневматическими тормозами. Тормозная система крупных шахтных подъемных машин состоит из пневмогрузового привода тормоза, исполнительного органа и панели управления тормозом. Для повышения надежности на каждой машине установлены два исполнительных органа, каждый со своим приводом. Тормоза работают независимо друг от друга.
Требования ПБ к тормозным устройствам:
-
Каждое тормозное устройство должно создавать рабочее и предохранительное торможение с независимым друг от друга способами их включения; -
Сложение тормозных усилий, создаваемых при раб. и пред. торможении, не допускается; -
Предохранительное торможение должно включаться как автоматически при каждом срабатывании защитных устройств или снятии напряжения, так и машинистом, причем включение предохранительного тормоза должно сопровождаться автоматическим отключением энергии, питающей подъемные электродвигатели; -
Начавшееся предохранительное торможение должно продолжаться до полной остановки подъемной машины и может быть прекращено только машинистом подъема после затормаживания машины рабочим тормозом; -
Система управления тормозным устройством должна выполняться таким образом, чтобы при всех возможных ее повреждениях наступало надежное торможение подъемной машины.
28. Привод подъемных установок с двигателями переменного тока.
Привод шахтных подъемных установок осуществляется электродвигателями постоянного или переменного тока. Большинство шахтных подъемных установок оснащено асинхронными двигателями (переменного тока) с фазным ротором с металлическим или жидкостным реостатом, что объясняется их небольшой стоимостью, простотой обслуживания и высокой эксплуатационной надежностью асинхронного привода. Максимальная мощность асинхронного двигателя –1600 кВт.
В связи с большой частотой вращения асинхронных двигателей их подключение осуществляется через редуктор. Возможен одно – или двухдвигательный привод шахтных подъемных машин.
При вращении органа навивки асинхронный двигатель может работать в следующих режимах:
–двигательный режим – направление движения сосудов совпадает с направлением развиваемого двигателем момента. Вращающий момент создается взаимодействием тока ротора с вращающимся магнитным полем;
–режим генераторного торможения ГВ – двигатель вращается моментом, создаваемым разностью натяжения подъемных канатов. Тормозной момент, препятствующий разгону системы, создается взаимодействием тока ротора с вращающимся магнитным полем. В этом режиме активная мощность передается в сеть;
–торможение противовключением ПВ – крайне редко встречающийся режим, когда торможение осуществляют включением двигателя в обратном направлении, то есть магнитное поле статора двигателя и ротор вращаются встречно;
– режим динамического торможения ДТВ – создается подключением обмоток статора к источнику постоянного тока. Тормозной момент создается взаимодействием тока ротора с неподвижным магнитным полем.
29. Механические характеристики асинхронного привода шахтного подъема.
Механическая характеристика – это зависимость между частотой вращения и момента. На рисунке представлена естественная мех. хар-ка асинхронного двигателя.

Mп – пусковой момент; nк – синхронная частота; Mкр – критический момент; Мн – номинальный момент; nн – номинальная частота.
1) Регулирование частоты вращения ротора асинхронного двигателя изменением частоты напряжения, подводимого к обмотке статора.

2) Регулирование частоты вращения ротора асинхронного двигателя посредством изменения величины скольжения. (Двигатели с фазным ротором)
Схема подключения асинхронного двигателя с фазным ротором.

«+» – малая стоимость оборудования и строительно-монтажных работ; простота обслуживания; малые затраты времени на восстановление при отказах, легкость резервирования; высокая эксплуатационная надежность.
30. Механические характеристики подъемных двигателей постоянного тока и способы регулирования скорости.
Мех-ие хар-ки двигателя постоянного тока определяются зависимостью
 ; – U-напряжение на якоре двигателя; М-момент на валу двигателя; Ф-магнитный поток.
; – U-напряжение на якоре двигателя; М-момент на валу двигателя; Ф-магнитный поток.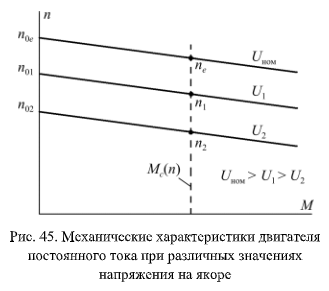
Мех. хар-ка двигателя, соответствующая номинальному напряжению на якоре Uном. – естественная мех. хар-ка. Остальные искусственные.
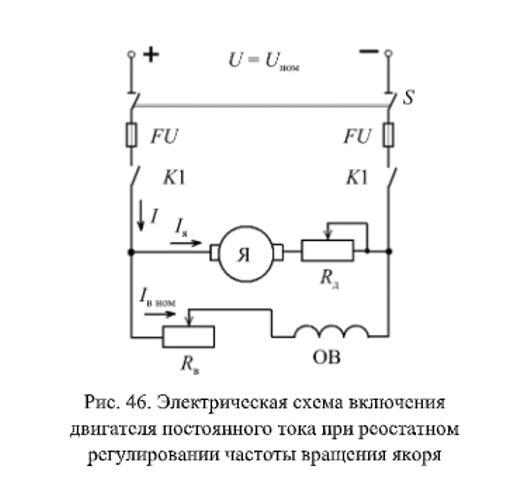

1) Регулирование частоты вращения якоря посредством изменения величины подводимого к якорю напряжения.
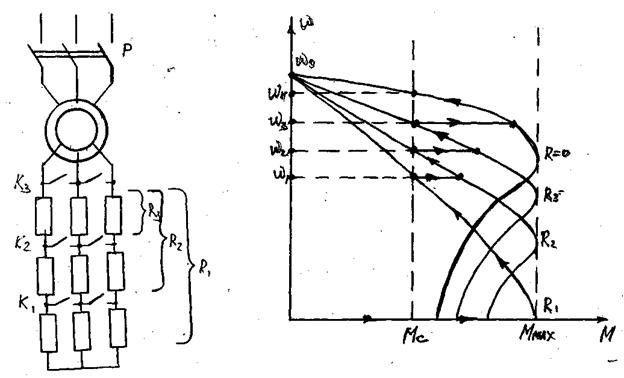
2) Регулирования частоты вращения двигателя постоянного тока посредством включения в цепь обмотки якоря добавочного сопротивления.
3) Регулирование частоты вращения двигателей постоянного тока независимого и параллельного возбуждения посредством изменения величины магнитного потока. (регулирование величины тока в обмотке возбуждения, что достигается включением в цепь обмотки возбуждения регулируемого по величине добавочного сопротивления).
31. Характеристика привода по системе Г-Д.

ОВСД – обмотка возбуждения синхронного двигателя;
ТВСД – тиристорный возбудитель синхронного двигателя;
СД – синхронный двигатель;
Г – генератор;
Д – двигатель.

«+» СД является компенсатором реактивной мощности
«–» 1. КПД ниже;
2. наличие 3-ех двигателей большой мощности.
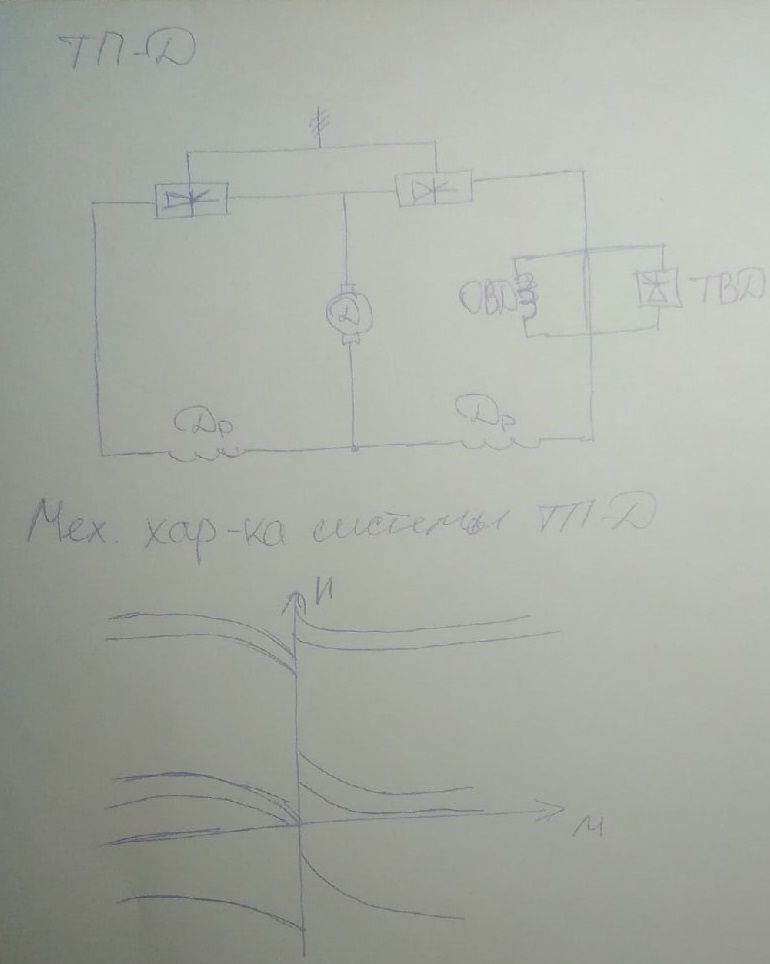
32. Характеристика привода по системе ТП-Д.
Привод по системе ТП-Д в настоящее время реализуется по двум принципиально отличающимся схемам:
-
с реверсом по якорной цепи двигателя; -
с реверсом по цепи возбуждения двигателя.
ТП-Д – тиристорный преобразователь – двигатель.
«+» 1) одна машина;
-
потери энергии в ТВ меньше; -
легче замена вышедшего из строя элемента(блочная система).
«–» 1) отрицательное влияние на сети;
2) тиристоры возбуждения (ТВ) должны иметь мощность двигателя, их должно быть 2.
3) стоимость выше.
По цепи возбуждения:
«–» 1) необходимость быстрого изменения тока возбуждения;
2) в зоне малых моментов ТВ ведет себя неустойчиво (зона прерывистых токов).
33. Сравнительный анализ приводов шахтных подъемных установок.
Общие требования к электроприводу:
– высокая надежность и безопасность;
– простота и удобство управления;
– минимальные капитальные затраты и экономичность при эксплуатации.
Привод постоянного тока (Г-Д; ТП-Д)
«+» 1. Плавное изменение скорости движения подъемных сосудов;
2. высокий КПД за счет малых потерь;
3. позволяет создать автоматизированный привод.
«–» 1. Высокая стоимость;
2. большие габариты.
Привод переменного тока:
«+» 1. Прост и надежен в эксплуатации;
2. небольшая стоимость;
3. не требует преобразователей энергии напрямую подсоединен к сети.
«–» 1. Не обеспечивает плавного регулирования скорости;
2. для регулирования используется введение в цепь ротора сопротивлений.
На рудничных подъемных установках используется ряд систем электроприводов, среди которых преимущественное применение имеет асинхронный привод с реостатным управлением (90% ПУ), а при большой мощности – электропривод постоянного тока по системе Г-Д
Асинхронный электропривод считается экономичным и целесообразным к применению на подъемных системах до 700-900кВТ. При мощности 1200-1400кВт затраты, связанные с начальной стоимостью привода постоянного тока, окупаются более низким его электропотреблением.
34. Системы мониторинга шахтных подъемных установок. Необходимость регистрации параметров. Расшифровка записей.
В соответствии с действующими нормативными документами [74, 115] все шахтные подъемные установки должны быть оснащены устройствами для регистрации основных параметров режимов работы подъемной машины. Эти устройства предназначены для непрерывного измерения и контроля основных параметров работы шахтной подъемной установки, индикации текущих значений, хранения и предоставления всей получаемой информации.
Необходимость расшифровки и анализа записей регистраторов параметров ШПУ, как правило с проведением техн. экспертизы после производственного инцидента или аварии.
Опыт расшифровки записей при анализе произошедших инцидентов показывает, что необходимо иметь записи в течении 24ч. до исследуемого явления. Эта информация позволяет оценить все происходившие на ПУ события, производственные осмотры подъемных сосудов, канатов, армировки ствола и т.д.
Специалиста горнодобывающего предприятия интересуют текущие параметры работы ШПУ, причины сбоев в работе ШП, действия обслуживающего персонала.
35. Перспективы развития ШПУ.
1) Загрузка скипа:
– по объему;
– по весу (предпочтительный, но редкий), общешахтный бункер отводят от ствола.
Измерение загрузки оптическими весами. Предполагается, что плотность изменяется не резко.
2) Конструкция шибера скипа – открывание шибера посредством канатов.
3) По направляющим
Применение трубчатых (квадратных) проводников.
4) Подвесные устройства:
– коуши двухстороннего зажатия;
– измерение нагрузки у подъемного сосуда.
На каждом подвесном устройстве есть записывающая аппаратура.
5) Мех-м подъемной машины:
– единый вал подъемной машины и двигателя.
+ меньше вибрации;
+ более компактная система.
Многоканатные подъемные установки расположены на земле.
6) Упрощение режимов работы на ШПУ.
7) Использование скипоклетей.
8) Канаты с пластическим обжатием прядей:
– надежность;
– долговечность.
Использование органического сердечника.
Внедрение системы Блеера на одноканатные системы подъема.