Файл: Назначение подъемных установок. История развития шахтного подъема.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 57
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
16. Выбор ускорений и замедлений подъемной системы. Требования Правил безопасности и норм технологического проектирования (ВНТП) к кинематическому режиму работы подъемных установок.
6.64. Для вертикальных людских и грузовых подъемов величина основного ускорения и замедления не должна превышать 0,75 м/с2.
6.65. При оборудовании машины скипового подъема системой давления двигателем с контуром регулирования по положению подъемного сосуда и регулируемой системой управления тормозом, а также при применении скипов с автономным приводом открывания - закрывания затвора допускается принимать трехпериодную тахограмму подъема. При этом величина основного замедления может быть более 0,75 м/с2.
6.66. Скорость равномерного движения сосуда на втором и шестом участках тахограммы следует принимать не более 0,5 м/с. Ускорение при трогании с места и замедление при стопорении не должно превышать 0,3 м/с2.
В местах перехода с канатных проводников на жесткие и обратно скорость подъема не должна превышать 1,5 м/с.
6.67. Суммарный путь движения для первого и второго участков тахограммы следует принимать для скипов равным длине кривых, увеличенной на 0,5 м, для клетей - 1,5 м. Суммарный путь движения на 6 и 7 участках тахограммы следует принимать равным для скипов - удвоенной длине кривых, для клетей - 3 м.
17. Расчет оптимальных по динамичности диаграмм скорости подъемных установок. Условия, при которых обеспечиваются минимальные динамические нагрузки. Выбор элементов расчетной диаграммы скорости.
Для того, чтобы снизить динамические нагрузки, необходимо снизить величину рывка, т.е. необходимо более плавно разгонять систему, таким образом получится оптимальная по скорости диаграмма.
 – рывок, где
– рывок, где  – период колебаний
– период колебаний  .
.  – частота собственных колебаний подъемного сосуда на канате
– частота собственных колебаний подъемного сосуда на канате
 .
. – жесткость каната, где Е – модуль упругости, F – площадь поперечного сечения, l – длина каната.
– жесткость каната, где Е – модуль упругости, F – площадь поперечного сечения, l – длина каната.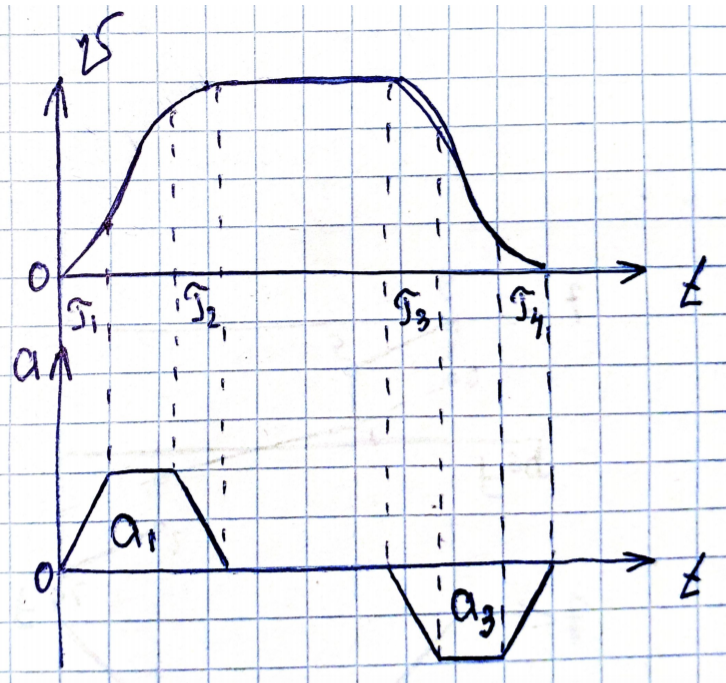
18. Динамика подъемных установок. Определение приведенной массы движущих частей подъемной установки.
Динамика подъемных установок решает две задачи:
-
Определение нагрузок в элементах подъемной системы для прочностного расчета (решается на основе многомассовой модели системы). -
Определение осредненных нагрузок в приводе при уточненном расчете номинальной мощности привода (решается на основе одномассовой модели с абсолютно жесткими связями)
В рудничном подъеме кроме поступательно движущихся частей, имеющих линейное ускорение — концевого груза и канатов, имеются также и вращающиеся части, которые имеют угловое ускорение, — направляющие шкивы, органы навивки, зубчатая передача и ротор двигателя. Для упрощения расчетов под ускоряемой или замедляемой массой движущихся частей подъемной установки понимают не действительную массу, приведенную массу.
Приведенная масса – это такая условная масса, сосредоточенная на поверхности канатоведущего органа подъемной машины, которая в любой момент обладает такими же инерционным запасом и кинетической энергией, что и рассредоточенная в отдельных элементах действительная масса системы.
Для сообщения вращающемуся твердому телу с моментом инерции I углового ускорения ε или линейного ускорения а на радиусе R необходим динамический момент Мдин:
 ,
,
 ,
, – величина приведенной массы (i – передаточное соотношение)
– величина приведенной массы (i – передаточное соотношение) – величина приведенного веса
– величина приведенного веса

– величина приведенного момента инерции
В заводских каталогах чаще всего приводится значение махового момента (произведение реального веса на квадрат диаметра инерции
 )
)Между моментом инерции и маховым моментом существует зависимость
 .
.При заданное величине махового момента приведенный вес определяется:
 (D’ – диаметр приведения).
(D’ – диаметр приведения).Необходимо иметь в виду, что веса вращающихся частей подъемной установки должны быть приведены к тем окружностям, на которых имеет место линейное ускорение подъема. приведенная масса:
 ,
, Где mс – масса скипа,
 – полезная масса.
– полезная масса.




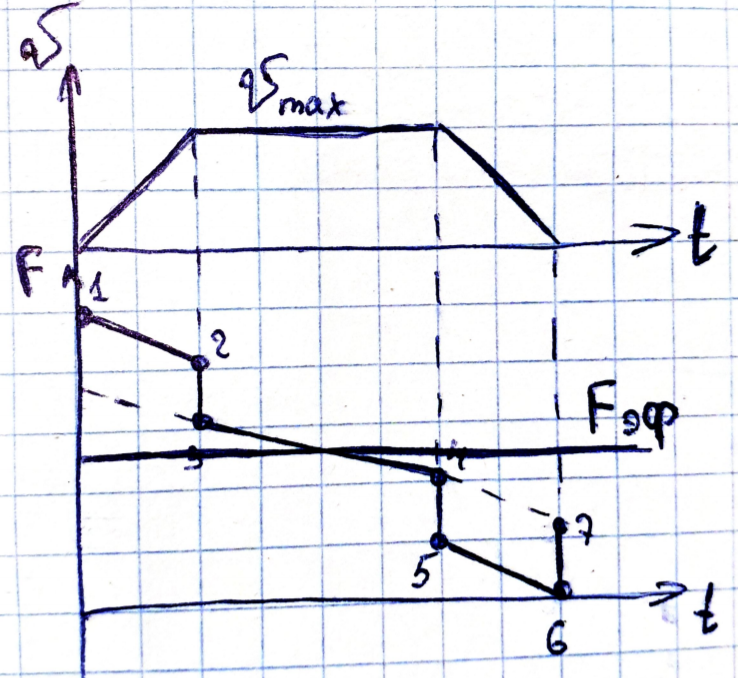
19. Построение диаграмм движущих усилий, приложенных к окружности органов навивки.
Основное уравнение подъема в общем случае имеет следующий вид:

Где
 – крутящий момент, обеспечиваемый электроприводом на валу подъемной машины;
– крутящий момент, обеспечиваемый электроприводом на валу подъемной машины;  – момент статических нагрузок на валу подъёмной машины;
– момент статических нагрузок на валу подъёмной машины;  – момент динамических нагрузок на валу подъемной машины.
– момент динамических нагрузок на валу подъемной машины.В случае, если барабан подъемной машины имеет постоянный радиус, а хвостовые канаты отсутствуют, то уравнение принимает вид:

где
 – усилие на ободе барабана;
– усилие на ободе барабана;  – путь, пройденный сосудом от начала подъема, – полезная масса,
– путь, пройденный сосудом от начала подъема, – полезная масса,  – высота подъема,
– высота подъема,  – масса 1м каната.
– масса 1м каната.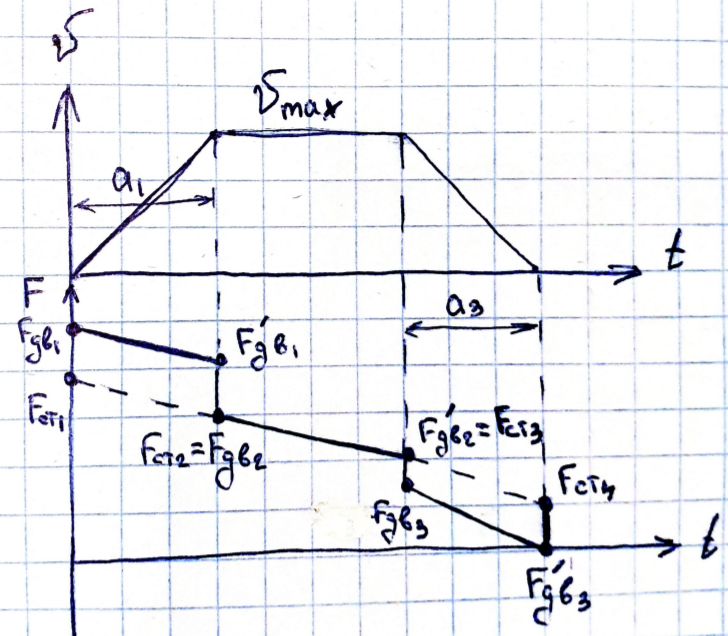






При построении диаграмм движущих усилий особое внимание следует уделять периодам замедления. Асинхронный двигатель при скоростях, близких к нулю, не может создавать усилий меньше 1/3 номинального (эффективного усилия). Поэтому в периоды замедления движущие усилия должны быть рассчитаны так, чтобы они были либо не менее 1/3Fэф, либо равнялись нулю (свободный выбег), либо отрицательными (тормозными). Если в эти периоды движущее усилие будет меньше 1/3Fэф, то
управление подъемной машиной значительно усложнится, так как машинист будет обязан дополнительно включать в работу механический тормоз.
20. Общее выражение для эффектного усилия и применение его к различным случаям подъема.
Эффективное усилие – постоянное по величине усилие, которое за цикл нагревает двигатель также, как и при переменной нагрузке за этот же период.
В общем виде эффективное усилие подъема имеет следующий вид:
 , где F – усилие элементарного участка, t – продолжительность элементарного участка.
, где F – усилие элементарного участка, t – продолжительность элементарного участка.  – эквивалентная продолжительность цикла (время за которое двигатель вращающийся с максимальной скоростью отдал бы такое же количество тепла, как и за время цикла подъема).
– эквивалентная продолжительность цикла (время за которое двигатель вращающийся с максимальной скоростью отдал бы такое же количество тепла, как и за время цикла подъема). (где
(где  – продолжительность паузы) – для двигателя с принудительным обдувом.
– продолжительность паузы) – для двигателя с принудительным обдувом. – для двигателей с самообдувом.
– для двигателей с самообдувом. –для i-периодной диаграммы (i– кол-во периодов).
–для i-периодной диаграммы (i– кол-во периодов).21. Эффективная мощность. Выбор двигателя и проверка его на перегрузки.
Эффективная мощность подъема:
 , где
, где  – максимальная скорость подъема,
– максимальная скорость подъема,  – КПД редуктора (двухступенчатый редуктор – 0,95; одноступенчатый редуктор – 0,97).
– КПД редуктора (двухступенчатый редуктор – 0,95; одноступенчатый редуктор – 0,97).  – эффективное усилие подъема.
– эффективное усилие подъема. В связи с возможным падением напряжения в электрической сети мощность двигателя Pдв принимают на 10 % больше эффективной.
 – мощность двигателя
– мощность двигателяПроверка двигателя на перегрузочную способность:
