Файл: Отчет об учебной практике с 07. 07. 2021 г по 31. 07. 2021 г. Руководитель практики.docx
Добавлен: 04.05.2024
Просмотров: 23
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

СОДЕРЖАНИЕ
1 Цель и задачи учебной практики
2 Список формируемых компетенций
3 Исследование космической робототехники
3.1 История развития космической робототехники
3.2 Современные разработки космической робототехники
3.4 Перспективы разработки космической робототехники
4.1 Космические платформы на основе механизма Саррюса
4.2 Практическое применение механизма Саррюса
4.3 Кинематический и статический анализ.
Теперь, когда у нас есть внутренние силы связи выраженный в терминах веса винтокрылого аппарата и угла захвата, мы можем использовать баланс моментов относительно шарнира ????????, чтобы найти сжимающую силу ????????, которую палец ноги прилагает к окуну, что приводит к уравнению силы, которую палец ноги прилагает к окну, в который вес винтокрылого летательного аппарата входит линейно:
с θ, уже определенным как функция известных параметров механизма в формуле.
До сих пор мы предполагали, что есть по одному пальцу на каждой стороне насеста. В общем, на одной стороне жердочки может быть несколько пальцев, и в этом случае можно предположить, что сила ???????? равномерно распределена между пальцами.
Чтобы найти сжимающую силу ????????, к которой прикладывается нижняя пластина. На насесте мы сначала выполняем баланс статических сил на нижней пластине и обнаруживаем, что вертикальная сила ???????? должна равномерно распределяться между двумя штифтовыми соединениями нижней пластины из-за симметрии. Затем мы выполняем статический баланс сил в вертикальном направлении на нижнем боковом звене:
с β и θ, определенными как функции параметров механизма в уравнении. (6) и уравнение. (7) соответственно. Так же, как было обнаружено, что член 2???? / ???? важен для характеристики угла контакта пальца β, мы обнаружили, что параметр 2???? / важен для характеристики силы захвата механизма как от пальцев, так и от нижней пластины {. {1}} Мы хотели бы, чтобы ???????? оставалось положительным (т. Е. В состоянии сжатия), чтобы нижняя пластина оставалась в контакте с насестом, как так, чтобы она способствовала захвату, так и чтобы наш кинематический анализ оставался действительным. Для этого требуется:
Мы видим, что это условие всегда выполняется, когда ???? ограничивается диапазоном 0 < ???? <???? / 2 по замыслу, предполагая, что ???? попадает в нормальный рабочий диапазон
рычажного механизма Саррюса: 0 <???? <???? / 2.Обеспечение этого предположения требует, чтобы мы ограничивали ???? для любого заданного ????, чтобы он находился в диапазоне:
 (4.16)
(4.16) Мы найдем в главе 4 видно, что по мере увеличения диапазона желаемых размеров окуня (и, следовательно, диапазона ожидаемого) диапазон допустимых значений ???? уменьшается.
Отклонение помех
В этом разделе мы описываем, как захват силы между механизмом и окунем связаны со способностью механизма отражать горизонтальные возмущающие силы (например, ветер) на винтокрылый аппарат. Предположим, что возмущающая сила ???????? приложена горизонтально на некотором расстоянии ???? над верхней пластиной (например, в центре давления винтокрылого аппарата). Эта сила создает вокруг насеста возмущающий момент:
которому должен противодействовать захват (это уравнение предполагает пренебрежимо малую толщина верхней и нижней пластин). Предположим, что коэффициент статического трения на границе раздела «окунь-механизм». Максимальный статический момент, который может быть отклонен силами захвата, действующими в момент рычага ????, определяется выражением:
который после замен становится:
Наш механизм сможет отклонить любой момент возмущения, который меньше этого максимума: ???????? <????????.????????????. Мы можем объединить приведенные выше уравнения, чтобы решить верхнюю границу горизонтальной возмущающей силы, которая может быть отклонена:
 (4.20)
(4.20)5 Патентный поиск
Патентный поиск – это выбор с запросом документа по заданным признакам из базы патентных данных. Так же это анализ объекта, который предполагается к патентованию, а именно выявления сильных и слабых сторон и поиска аналогов в базе патентных данных.
5.1 Патентный поиск механизма Саррюса
Стабилизирующее устройство поворотной тележки двухосного прицепа (рис. 5.1).
Авторы патента: Строганов Юрий Николаевич (RU), Попова Анастасия Ивановна (RU), Огнев Олег Геннадьевич (RU), Строгонова Оксана Юрьевна (RU).
Патент: R U 196271 U 1
Дата подачи заявки: 16.10.2019
Заявка: 2019132852, 16.10.2019
Патентообладатель(и): Федеральное государственное автономное образовательное учреждение высшего образования "Уральский федеральный университет имени первого Президента России Б.Н. Ельцина" (RU).
Полезная модель относится к автомобиле- и тракторостроению, а именно к стабилизирующим тягово-сцепным устройствам тракторных и автомобильных двухосных прицепов, снабженных передней поворотной тележкой. Сущность полезной модели заключается в том, что кинематическая схема стабилизирующего устройства поворотной колесной тележки позволяет повысить безопасность движения транспортного поезда путем стабилизации движения поворотной колесной тележки относительно платформы двухосного прицепа за счет возникновения относительно соединительного шкворня поворотной платформы силового стабилизирующего момента, препятствующего боковым отклонениям передней колесной тележки. Это достигается за счет того, что поворотная платформа и рама передней поворотной колесной тележки связаны между собой четырьмя шарнирно соединенными парами одинаковых прямоугольных пластин по принципу пространственного механизма Саррюса. При этом между нижней частью поворотной платформы и рамой поворотной тележки размещено плоское звено, шарнирно соединенное с пластинами, связывающими переднюю и заднюю части поворотной платформы с рамой поворотной тележки, причем в передней части плоского звена выполнена поперечная прорезь, расположенная впереди горизонтальной оси шарнирного соединения пластин, внутри которой расположен вертикальный штифт, закрепленный на раме прицепа впереди шкворня, соединяющего поворотную платформу и раму прицепа. Технический результат заключается в том, что стабилизирующее устройство поворотной тележки двухосного прицепа позволит обеспечить более устойчивый прямолинейный ход прицепа за счет улучшения стабилизации движения передней поворотной тележки прицепа.
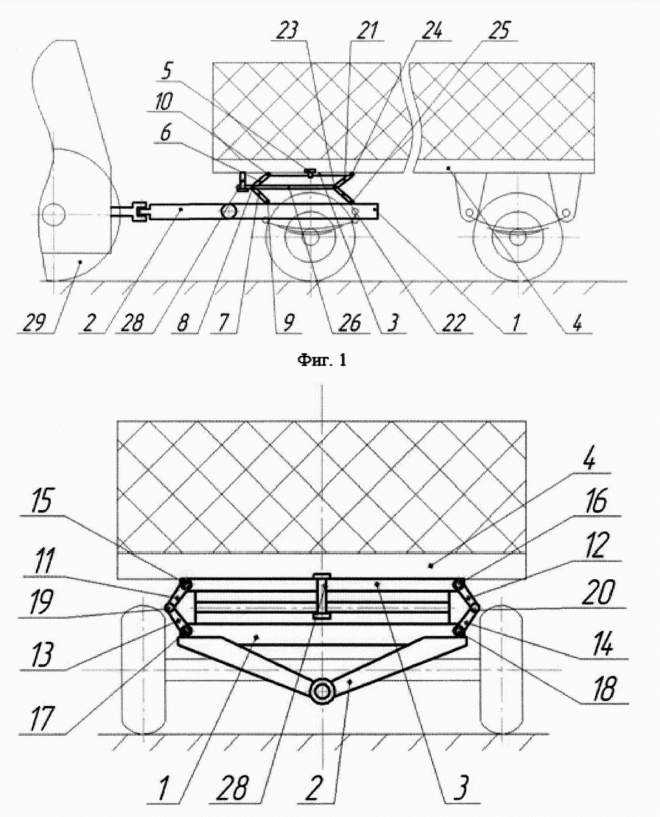
Рисунок 5.1
Полезная модель относится к автомобиле- и тракторостроению, а именно к стабилизирующим тягово-сцепным устройствам двухосных тракторных и автомобильных двухосных прицепов, снабженных передней поворотной тележкой. Аналогом по технической сущности и достигаемому результату к предлагаемому стабилизирующему тягово-сцепному устройству поворотной тележки двухосного прицепа является Стабилизирующее устройство поворотной тележки прицепа по патенту РФ №181371, 2018 г, содержащее поворотный круг, верхнее кольцо которого соединено с нижней частью рамы прицепа, а нижнее кольцо закреплено на раме поворотной подрессоренной тележки, опирающейся на ось ходовых колес, причем верхнее и нижнее кольца поворотного круга связаны между собой подвижным телескопическим соединением, при этом во внутреннем пространстве поворотного
круга установлен рабочий силовой цилиндр, корпус которого закреплен посредством кронштейна на раме поворотной тележки, а шток соединен шарнирно с нижней частью рамы прицепа, причем продольная ось рабочего силового цилиндра совпадает с осью поворота рамы прицепа относительно поворотной тележки и пересекает середину оси ее ходовых колес, при этом поршневая полость рабочего силового цилиндра соединена трубопроводом со штоковой полостью подающего силового цилиндра, установленного в вертикальной продольной плоскости прицепа, связывающего посредством шарнирных соединений заднюю часть рамы поворотной тележки и верхнее кольцо поворотного круга. Недостатком данного стабилизирующего устройства является наличие силовой системы (например - жидкостной), включающей два силовых цилиндра непрерывно работающих при движении прицепа, что снижает надежность эксплуатации устройства.
Заключение
Промышленные роботы способны выполнять как вспомогательные (транспортные операции), так и основные (формообразование, изменения размеров заготовки, окраска, сборка) технологические операции. В наше время сферы применения промышленных роботов настолько же многообразны, как и современное производство. Мировой опыт показал, что возможно роботизирование практически любого технологического процесса, главное условие, чтобы это было экономически выгодно. Уже около двух десятилетий предприятия проявляют повышенный интерес к роботизированным технологиям резки и сварки, но в последние годы наметилось значительное увеличение спроса на промышленные роботы для автоматизации производства: обслуживания станков и технологического оборудования, механической обработки, покраски и др.
Список используемых источников
-
ГОСТ 19325-73. Передачи зубчатые конические; термины, определения и обозначения. – М.: ИПК Издательство стандартов, 1973. – 88 с. -
ГОСТ 19624-74 Передачи зубчатые конические с прямыми зубьями. Расчет геометрии. – М.: ИПК Издательство стандартов, 1990. – 32 с. -
Скороходов, Е. А. Общетехнический справочник // – М.: Машиностроение, 1982. – 416 с. -
Лаврентьев С.Ю., Лисовенко Д.С., Ченцов А.В. Механические свойства двумерной ауксетической конструкции / Сборник трудов. Международная молодёжная научная конференция "44-е Гагаринские чтения 2018". - М.: НИУ МАИ, 2018. - С. 76-78. -
Механизм Саррюса. – Электронные ресурс: https://dic.acadеmic.ru/dic.nsf/ruwiki/1 562130 -
Ауксетики – материалы с отрицательным коэффициентом Пуассона. Кафедра Статистической физики Физического факультета Санкт-Петербургского государственного университета. – Электронный ресурс: https://vk.com/vidеo-3519369_163344968 -
Патенты на изобретения // Энциклопедический словарь Брокгауза и Ефрона: в 86 т. (82 т. и 4 доп.). – СПб. 1890–1907. -
Goncalvеs, J. Rеal timе tracking of an omnidirеctional robot /J. Gonçalvеs, J. Lima, P. Costa // ICINCO, Procееdings of thе Fifth Intеrnational Confеrеncе on Informatics in Control, Automation and Robotics, 2008. – Pp. 5-10. -
J. R. Thomas, J.J. Polin, K. Srееnath, and V. Kumar, “Avian-Inspritеd Grasping for Quadrotor Micro UAVs,” to appеar IDЕTC/CIЕ, 2013. -
D. Mеllingеr, Q. Lindsеy, M. Shomin, and V. Kumar, “Dеsign, modеling, еstimation and control for aеrial grasping and manipulation,” IЕЕЕ/RSJ Int. Conf. Intеlligеnt Robots and Systеms, pp. 2668-2673, 2011.

