ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 43
Скачиваний: 0

-
Автоматические регуляторы
Функционирование автоматических регуляторов основано на использовании отрицательной обратной связи. Обратная связь — воздействие результатов функционирования какой-либо системы на характер дальнейшего функционирования этой же системы. Отрицательная обратная связь (ООС) при отклонений объекта от равновесия вызывает нейтрализацию этого отклонения.
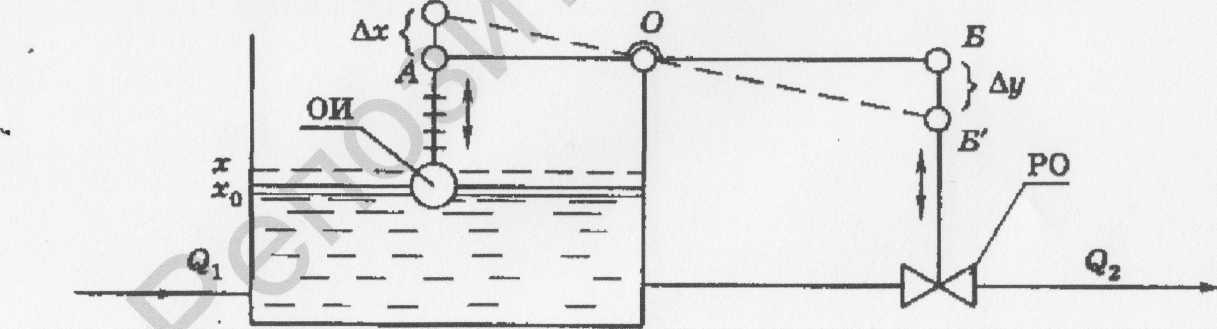
Различают регуляторы прямого (РИД) и непрямого (РНД) действия. РИД (рис. 1.5) приводятся в действие за счет энергии регулируемой среды. Их применяют, если усилия, развиваемого датчиком, достаточно для привода в действие регулирующего органа, который находится на относительно небольшом расстоянии от датчика.
А'
В регуляторах непрямого действия (РИД) для привода регулирующего органа используется энергия от постороннего источника. На рис. 1.6 приведена схема процесса непрямого регулирования уровня жидкости в резервуаре.
Измерительное устройство — поплавок 1 — при помощи рычагов связано с подвижным электрическим контактом 2, который может замыкаться с одним из неподвижных контактов: Б (больше) и М (меньше). В зависимости от того, с каким из этих контактов замкнут подвижный контакт, вал электродвигателя 3 вращается в ту или другую сторону. Через червячную зубчатую передачу 4 и 5, а также тягу 7 электродвигатель открывает или закрывает регулирующий орган — клапан 6, установленный на линии подвода жидкости <2; в бак.

Регулирующее воздействие регуляторов может быть прерывистым и непрерывным.
Регуляторы непрерывного действия бывают пропорциональные, интегральные, пропорционально-интегральные и пропорционально-интегральные с предварением [2].
Пропорциональный (статический) регулятор (ГТ-регулятор), осуществляет пропорциональную зависимость между положением регулирующего органа ^ и отклонением регулируемого параметра X,
у=К,х
где К1 — статический коэффициент передачи (усиления) регулятора, который может изменяться в широких пределах.
Интегральный регулятор (И-регулятор) — это регулятор, у которого при отклонении регулируемого параметра х от заданного значения регулирующий орган медленно перемещается все время в одном направлении, пока параметр не вернется к заданному значению. В этом регуляторе регулирующее воздействие пропорционально интегралу от отклонения параметра х, регулируемого по
времени,
![]()
где К2 — коэффициент передачи регулятора, характеризующий скорость исполнительного механизма.
Пропорционально-интегральныйрегулятор (ПИ-регулятор) сочетает положительные качества пропорционального и интегрального регуляторов. В первый момент после возникновения отклонения регулируемой величины ПИ- регулятор работает как П-регулятор, а затем как И-регулятор. Закон регулирования ПИ-регулятора содержит пропорциональную и интегральную со
ставляющие
![]()
ПИ-регуляторы позволяют осуществить регулирование без остаточного отклонения и применяются для регулирования процессов в объектах, обладающих значительным запаздыванием и отличающихся большими колебаниями нагрузки.
Пропорционально-интегральные регуляторы с предварением (ПИД- регуляторы) отличаются от обычных ПИ-регуляторов наличием дифференцирующего звена, т.е. дополнительным регулирующим воздействием по первой производной от параметра, регулируемого по времени,
где Тп — время предварения.
ПИД-регуляторы рекомендуется применять для многоемкостных объектов с очень большим временем запаздывания.
-
Объект управления и его свойства
Процесс регулирования во многом зависит не только от регулятора, но и от свойств объекта: емкости, характера изменения нагрузки, времени разгона, самовыравнивания и запаздывания. В каждом объекте может одновременно регулироваться несколько разных величин.
Свойство объекта накапливать энергию, вещество и информацию называют аккумулирующей способностью. Эту способность характеризует в полной мере емкость объекта.
Под емкостью объекта понимают запас вещества или энергии, содержащейся в нем при заданном значении регулируемого параметра. Емкость может существовать только при наличии сопротивления выходу вещества или энергии из
объекта
[3].
ЗХС
Эхе
 Чем
больше емкость объекта, тем меньше
скорость изменения параметра при
одном и том же изменении количества
подаваемого (расходуемого) вещества
(энергии). Объекты могут быть одноъёмкостными
(рис. 1.7) и многоъёмкостными (рис. 1.8).
Чем
больше емкость объекта, тем меньше
скорость изменения параметра при
одном и том же изменении количества
подаваемого (расходуемого) вещества
(энергии). Объекты могут быть одноъёмкостными
(рис. 1.7) и многоъёмкостными (рис. 1.8).
Емкость объекта определяет такую характеристику, как время разгона.
Временем разгона объекта называют период, в течение которого регулируемый параметр изменяется от исходной величины до величины, соответствующей номинальной (расчетной) нагрузке объекта при условии, что скорость поступления регулирующей среды в течение этого времени остается постоянной. Время разгона объекта может определяться экспериментально или расчетным путем.
 Одной
из наиболее существенных характеристик
объекта регулирования является
криваяразгона,
показывающая изменение регулируемого
параметра в каждый равный промежуток
времени после однократного возмущения.
Экспериментальные кривые разгона для
объектов, в которых регулируется уровень,
представлены на рис. 1.9.
Одной
из наиболее существенных характеристик
объекта регулирования является
криваяразгона,
показывающая изменение регулируемого
параметра в каждый равный промежуток
времени после однократного возмущения.
Экспериментальные кривые разгона для
объектов, в которых регулируется уровень,
представлены на рис. 1.9.
Кривая 1 характеризует возмущающее воздействие, кривые 2 и 3 — восстановление уровня соответственно в объектах, показанных на рис. 1.7, 1.8. Пунктирные линии характеризуют соответственно начальный (хх) и установившийся (х2) уровни.
Для исследования свойств автоматической системы регулирования (АСР) составляют структурную схему из звеньев, которые характеризуются передаточными функциями. При изучении процессов в переходных режимах, происходящих в АСР, абстрагируются от технической природы конкретной регулируемой величины и устройств, входящих в схему, и рассматривают только математическую модель процесса регулирования.
Свойства звеньев определяются их статическими и динамическими характеристиками.
Статической характеристикой звена называют зависимость между входной и выходной величинами в различных установившихся состояниях равновесия. В общем случае связь между входными и выходными значениями определяют выражением
"вых- /(^вх)'
Динамической характеристикой элемента называют зависимость изменения во времени выходной величины от входной в переходном режиме. Эти характеристики элементов выражаются обычно дифференциальными уравнениями, называемыми передаточными функциями.
Реальные звенья обладают инерционностью. Поэтому передача воздействия выхода происходит не одновременно с воздействием входной величины, а с
некоторым временем запаздывания t0.
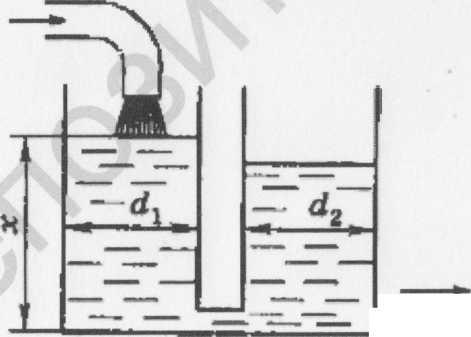
В двухъемкостных объектах (рис. 1.10) при скачкообразном нанесении возмущения в момент времени изменение параметров процесса начинается не сразу, а через промежуток времени ^ где (/— время передаточного запаздывания).
Передаточное запаздывание происходит из-за того, что всегда требуется некоторое время для прохождения сигнала от первичного преобразователя измерительной системы до регулятора, а затем от регулятора до объекта.

-
ЭЛЕМЕНТЫ АВТОМАТИКИ
-
Основные понятия и определения
-
Системы автоматики состоят из ряда связанных между собой элементов, выполняющих определенные функции и обеспечивающих в комплексе весь процесс улравления: получение первичной информации, усиление и измерение сигналов информации, преобразование их в управляющие сигналы и воздействие посредством исполнительных механизмов на регулирующие органы.
Все элементы любой группы имеют вход X и выход У. Входной величиной Овходным сигналом) элемента могут быть мгновенные значения физических величин (скорости, ускорения, давления, температуры, перемещения, тока, напряжения и др.), амплитудные значения синусоидальных или импульсных электрических величин, частота физических величин и т.д. Выходной величиной (выходным сигналом) может быть электрический, пневматический, гидравлический сигналы, различные по величине и характеру.
Режим работы элемента (системы) при постоянных во времени входной и выходной величинах называют установившимся или статическим режимом. Функциональная зависимость выходной величины у от входной х, выраженная математически или графически, называется статической характеристикой элемента у = /(х). Режим работы элемента при переменных во времени входной и выходной (или одной из них) величин называют динамическим.
По статической характеристике можно определить вид элемента (датчик, реле). Так, например, если статическая характеристика элемента непрерывна, т.е. величина у находится в определенной непрерывной зависимости от величины х, то такой элемент называют первичным преобразователем или датчиком. Если статическая характеристика элемента изменяется скачком, т.е. включение или отключение осуществляется при достижении входной величиной л; определенных, заранее установленных значений, то такой элемент называется реле.
Элементы автоматики характеризуются коэффициентом передачи, порогом чувствительности и погрешностью.
Коэффициент передачи элемента К представляет собой отношение выходной величины элемента^ к входной величине х, т.е. К=у/х. Коэффициент передачи датчика называют также чувствительностью. Если входная и выходная величины элемента имеют одинаковую физическую природу, то коэффициент передачи называют коэффициентом усиления.

