Файл: Курсовая работа По дисциплине Электрические машины Вариант 2 Выполнил студент группы эт212зу бархатов Илья Витальевич.docx
Добавлен: 16.10.2024
Просмотров: 67
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Структура условного обозначения:
4П — обозначение серии машины;
Х — обозначение машины в зависимости от исполнения по степени защиты и способа охлаждения: Ф—защищенное P23 с независимой вентиляцией от постороннего вентилятора IC06; Н — защищенное IP23 с самовентиляцией IC01; П — закрытое IP44 (защищенное IP23) продуваемое от постороннего вентилятора IC37 (IC17); Б — закрытое IP44 с естественной вентиляцией IC0041; О — обдуваемое ICO141.
М — модификация серии 4П;
ХX — электрическая модификация: Г — генератор; 2В — возбудитель; отсутствие знака — двигатель.
ХХХ — высота оси вращения в мм;
Х — условная длина сердечника якоря: S — первая длина; М — вторая длина; L — третья длина; Х — повышенная точность; отсутствие знака — нормальная точность;
Г — наличие тахогенератора;
Х — температурная защита;
УХЛ4 — климатическое исполнение и категория размещения по ГОСТ15150.
Электрические машины закрытого и обдуваемого исполнений изготавливаются по отдельным заказам с параметрами, согласованными заказчиком с изготовителем.
Условия эксплуатации машин серии 4П: высота над уровнем моря — до 1000 м, температура окружающего воздуха —от 5 до 40 °С, относительная влажность воздуха до 80% при температуре 25 °С и при более низких температурах без конденсации влаги. Окружающая среда — невзрывоопасная, не содержащая токопроводящей пыли, агрессивных газов и паров в концентрациях, разрушающих металлы и изоляцию. Воздействие механических факторов внешней среды — по группе Ml ГОСТ 17516-72.
Построим естественную механическая характеристика (прямая 1, на рис. 5).
 (1.5)
(1.5) (1.6)
(1.6)
 (1.7)
(1.7) (1.8)
(1.8)
 (1.9)
(1.9)
Для определения требуемой зонности регулирования
, проведена прямая, соответствующая заданной скорости вращения вала двигателя (прямая 2, на рис 4.5), на которой отмечены заданные в условии моменты. В данном случае мы имеем двух зонное регулирование.
Рисунок 5- Естественная и искусственные механические характеристики
Принимаем, что в первой зоне скорость вращения вала двигателя регулируется изменением напряжения на зажимах якоря.
В первой зоне регулирования характеристики, при регулировании скорости вращения вала двигателя изменением напряжения на якоре, сохраняют свою жесткость, следовательно, для построения искусственных характеристик в этом случае достаточно через требуемую точку провести прямые, параллельные прямой естественной характеристики (прямые 3 и 4, на рис.5).
Принимаем, что во второй зоне регулирование осуществляется за счет ослабления магнитного потока, создаваемого обмоткой возбуждения. Характеристики в этом случае прямолинейны, но не параллельны естественной характеристике. Регулируется скорость уменьшением магнитного потока, создаваемого обмоткой возбуждения.
При построении искусственной характеристики во второй зоне (прямая 5, на рис.4.5), учитывая, что при таком способе регулирования P=const для данной характеристики, определено его значение по формуле 1.10.
 (1.10)
(1.10)
Затем взято произвольное, но близкое к нулю, значение момента, и найдена еще одна точка с координатами


 (1.11)
(1.11)
Аналогично были произведены расчёты для прямой 6:
 (1.12)
(1.12)



(1.13)
1.3 Выбор тиристорного преобразователя
Тиристорный преобразователь предназначен для преобразования трехфазного переменного напряжения в постоянное, и регулирования его действующего значения на активной, активно-индуктивной и активно-ёмкостной нагрузке. Регулирование осуществляется за счет изменения угла задержки отпирания силовых тиристоров
Электропривод постоянного тока на основе тиристорных преобразователей в настоящее время широко используется. Это объясняется рядом достоинств этого типа электропривода:
-высокое быстродействие, которое ограничивается коммутационной способностью двигателя и механической инерционностью привода;
- мгновенная готовность к работе, широкий диапазон температур и длительный срок службы;
- номинальный КПД преобразователя превышает 92-96%;
-малые весогабаритные показатели; блочная компоновка позволяет сократить требуемые производственные площади, уменьшить капитальные затраты и расходы на установку и эксплуатацию.
Недостатки тиристорного электропривода:
-пульсации выпрямленного напряжения и тока на выходе тиристорного преобразователя повышают нагрев и ухудшают коммутацию двигателя, что требует установки сглаживающих реакторов;
-при глубоком регулировании напряжения тиристорный преобразователь имеет низкий коэффициент мощности, что требует разработки, и установки специальных компенсирующих устройств;
Схема подключений тиристорного электродвигателя для двигателя постоянного тока приведена на рис. 6.
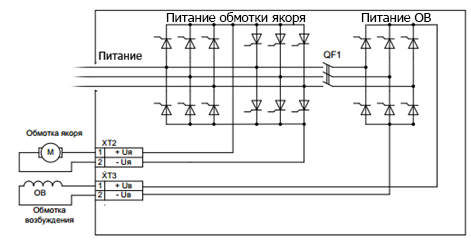
Рисунок 6-Схема подключения ТРС к обмоткам ДПТ НВ
Для питания электродвигателя постоянного тока выбираем тиристорный преобразователь ТЕР4-63/230Н-1-2 УХЛ4
Комплектный преобразователь выбран по выходному напряжению обмоток якоря и возбуждения.
Выбор ТП осуществлён по:
-
Регулируемому диапазону напряжений 0…500В. -
По номинальному току двигателя Iном=30 А. -
По перегрузочной способности: I=1,5∙Iн в течении 30 сек.
В данном комплектном тиристорном преобразователе реализован ряд защит:
-
Защита от короткого замыкания на выходе. -
Защита от перегрузки длительным током. -
Защита от перегрева тиристоров, которая реализована с помощью датчика температуры. -
Защита от потери фазы или “слипания” фаз. -
Защита от потери поля возбуждения.
Технические характеристики реверсивного преобразователя приведены в таблице 3.
В качестве регулирующего элемента в устройстве используются тиристорные модули, каждый из которых содержит по два тиристора. Силовое напряжение для питания выпрямителя обмотки якоря подключается к клеммной колодке XT1 (cм. рис.6). Выход выпрямителя для питания обмотки якоря – XT2, выход для питания обмотки возбуждения – XT3(см. рис.6). На лицевой панели размещены элементы индикации и управления. Внешние провода и кабели для подключения напряжения сети, нагрузки и цепей управления вводятся в шкаф.
Таблица 3
| Выходное напряжение питания обмотки якоря | 220 В |
| Выходное напряжение питания обмотки возбуждения | 230 В |
| Регулирующий элемент | Тиристор |
| Торможение | Реверсом (противовключением) |
| Сигнал управления | 0..10 В, 0..20 мА, 4..20 мА |
| Вспомогательное питание для системы управления | 198-242 В 50Гц |
| Режим ограничения выходного тока или напряжения | Есть |
| Тип тиристорных модулей | Semikron |
Преобразователь состоит из двух выпрямителей: один предназначен для питания обмотки якоря (см. рис. 6), второй – для питания обмотки возбуждения. Выпрямитель питания обмотки якоря – реверсивный, он состоит из двух мостов, соединенных встречно.