Файл: Курсовая работа По дисциплине Электрические машины Вариант 2 Выполнил студент группы эт212зу бархатов Илья Витальевич.docx
Добавлен: 16.10.2024
Просмотров: 72
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Старооскольский технологический институт им. А.А. УГАРОВА
(филиал) федерального государственного автономного образовательного учреждения
высшего образования
«Национальный исследовательский технологический университет «МИСиС»
ФАКУЛЬТЕТ АВТОМАТИЗАЦИИ И ИНФОРМАЦИОННЫХ НАПРАВЛЕНИЙ
КАФЕДРА АВТОМАТИЗИРОВАННЫХ И ИНФОРМАЦИОННЫХ СИСТЕМ УПРАВЛЕНИЯ
Курсовая работа
По дисциплине: «Электрические машины»
Вариант № 2
Выполнил студент группы: ЭТ-21-2-ЗУ Бархатов Илья Витальевич.
ФИО полностью подпись
Проверил: доцент к.п.н. Гамбург Клавдия Соломновна.
должность, звание, Ф.И.О. полностью подпись
Старый Оскол 2022 г.
Оглавление
1. АЭП с ДПТ НВ 5
1.1 Схема регулирования ТП-Д 5
1.2 Выбор ДПТ НВ 6
1.3 Выбор тиристорного преобразователя 12
1.4 Выбор тахогенератора 15
2. АЭП с АДК 17
2.1 Схема регулирования ПЧ-АД 17
2.2 Выбор асинхронного двигателя 18
2.3 Выбор частотного преобразователя 25
2.4 Выбор комплектного асинхронного привода 30
Заключение 38
Список литературы 39
Введение
Современный автоматизированный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) и главным источником механической энергии в промышленности.
В настоящее время автоматизированный электропривод является основным видом привода стационарных машин и механизмов.
В качестве двигателей используются электрические машины постоянного и переменного тока различных типов. Для управления двигателями используются специализированные частотные и тиристорные преобразователи. Современный электропривод, как правило, автоматизирован. Автоматическая система управления электроприводом позволяет наиболее рационально построить технологический процесс, повысить производительность труда, улучшить качество продукции и снизить ее себестоимость.
Тема данной курсовой работы: «Расчет и выбор силовой части автоматизированного привода» актуальна, так как определяющим фактором высокопроизводительной и стабильной работы автоматизированного электропривода является правильно выбранная силовая часть.
В рамках курсовой работы будут рассмотрены такие аспекты, как расчёт и выбор двигателей постоянного и переменного тока, построение естественных и искусственных характеристик выбранных двигателей, расчёт и выбор преобразователей постоянного и переменного тока, выбор комплектного асинхронного привода.
Будут рассмотрены двигатели и преобразователи российского и зарубежного производства.
1. АЭП с ДПТ НВ
1.1 Схема регулирования ТП-Д
 Данный АЭП с ДПТ НВ реализован по системе ТП-Д с двух зонным регулированием.
Данный АЭП с ДПТ НВ реализован по системе ТП-Д с двух зонным регулированием. 
Рис.1.1 Двухконтурная схема регулирования
Рисунок 1-Функциональная схема двухконтурного подчинённого регулирования по системе ТП-Д
В данную схему входят: SA – программируемый логический контроллер или ПК с соответствующим ПО, т.е. электронное устройство, которое задаёт требуемую технологическим процессом скорость вращения вала двигателя. Сигнал с него одновременно поступает и в основной контур, и во вспомогательный контур.
В основной контур входят: BR–тахогенератор, который измеряет фактическую скорость вращения вала прямым измерением; PC -реле скорости; РТ – реле тока; СИФУ1 – система импульсно-фазового управления, в которой окончательно формируется управляющий сигнал;UZ1–реверсивный тиристорный преобразователь; UA1–измеряющее разделительное устройство, с помощью которого косвенным методом (по напряжению и току) измеряется фактическая скорость вращения вала;UE–определение напряжения на обмотке якоря.
Во вспомогательный контур входят: РТВ–реле тока обмотки возбуждения

; СИФУ2-система импульсно-фазового управления, в которой окончательно формируется управляющий сигнал; UZ2–неревесивный тиристорный преобразователь, UA2 - измеряющее разделительное устройство.
Обозначенные на схеме элементы под номерами 1, 2, 3, 4 – сравнивающие устройства.
Основной контур обеспечивает регулирование скорости вращения вала двигателя в первой зоне изменением напряжения на зажимах якоря.
Вспомогательный контур является подчинённым и осуществляет регулирование во второй зоне за счет уменьшения (ослабления) магнитного потока, создаваемого обмоткой возбуждения.
1.2 Выбор ДПТ НВ
Исходные данные представлены в таблице 1 [1].
Таблица 1
| Вариант | Заданная диаграмма | М1, | М2, | М3, | М4 | t 1 | t 2, | t 3, | t 4, | n, | Величина напряжения, |
| Н*м | Н*м | Н*м | Н*м | с | с | с | с | об/мин | В | ||
| 2. | рис.1 | 100 | 80 | 50 | 20 | 15 | 20 | 10 | 25 | 720 | 220 |
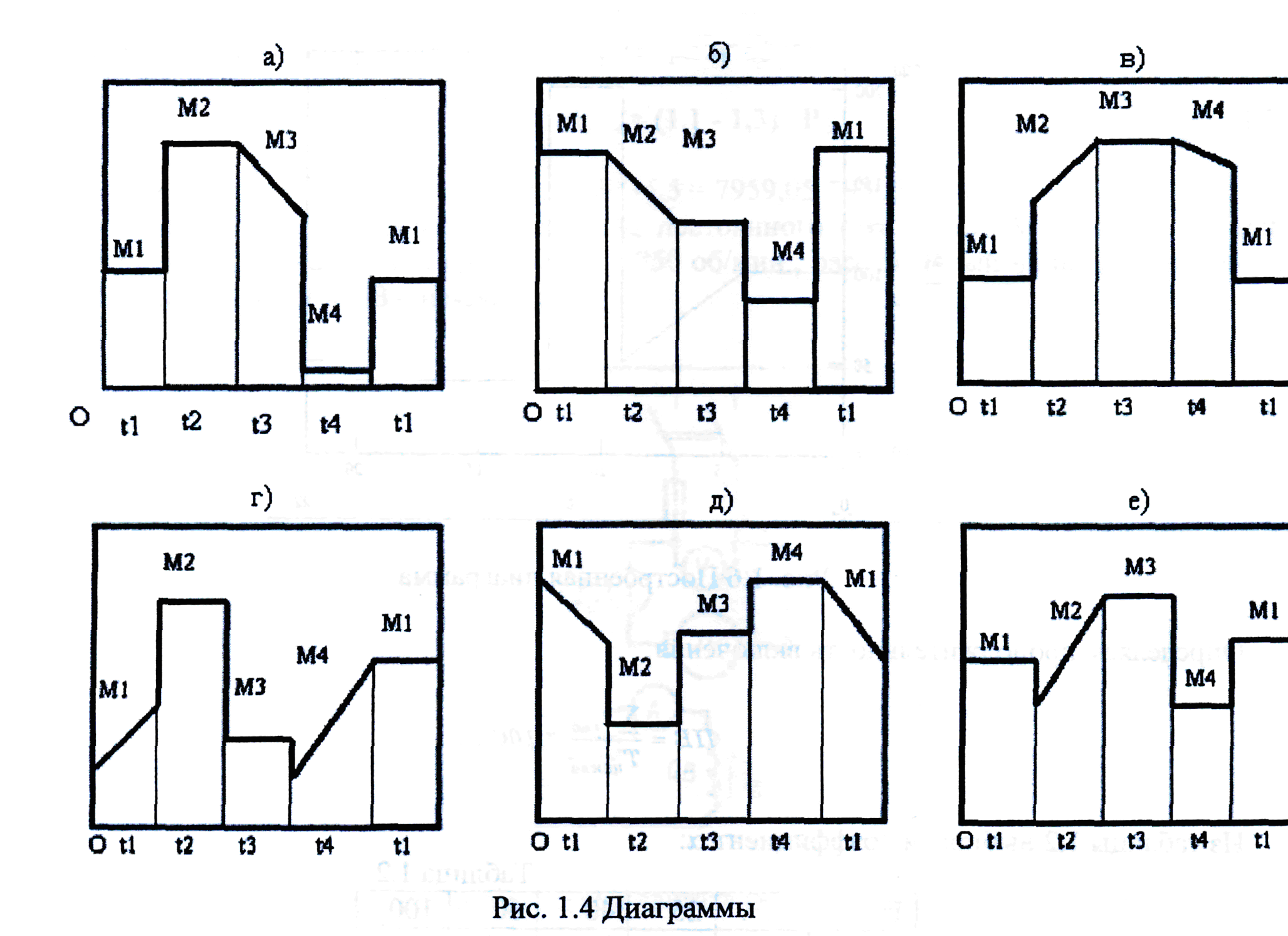
Рис.1 Заданная диаграмма моментов
Для выбора двигателя производим построение временной диаграммы моментов (рис.1) с учётом изменений или постоянства моментов в определённые промежутки времени.
Рисунок 3-Временная диаграмма моментов для заданного АЭП с ДПТ НВ
Затем определяем продолжительность включения
 (1.1)
(1.1)
Определяем эквивалентный момент по формуле 3.2. Коэффициент
 , учитывающий продолжительность включения двигателя, выбирается из таблицы 2:
, учитывающий продолжительность включения двигателя, выбирается из таблицы 2:Таблица 2
| ПВ | 15 | 25 | 40 | 60 | 100 |
| | 0,2 | 0,4 | 0,6 | 0,8 | 1 |

(1.2)

Находим необходимую эквивалентную мощность, исходя из эквивалентного момента и заданной скорости вращения якоря
 (1.3)
(1.3)Так как согласно варианта n=720 об/мин, тогда по формуле 1.3

Искомая номинальная мощность двигателя принята равной (формула 1.4)
Pном=(1,1-1,3)∙PЭ (1.4)

Способ соединения ОЯ и ОВ – независимый, так как в промышленных АЭП для двухзонного регулирования применяются двигатели постоянного тока с независимым возбуждением.
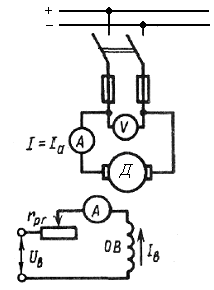
Рисунок 4-Схема соединений ОЯ с ОВ в ДПТНВ
По справочным данным (ссылка на источник информации обязательна) выбран электродвигатель постоянного тока 4ПНМ180М
-
Номинальная мощность: Pном=5,6 кВт -
Номинальное напряжение: U=220В -
Номинальная частота вращения nном=710 об/мин, -
Максимальная частота вращения двигателя nmax=2500 об/мин -
Номинальный ток: Iном=30 А -
КПД=85%
Электрические машины постоянного тока серии 4П с высотой оси вращения 200–280мм предназначены для комплектации электроприводов постоянного тока общепромышленного назначения (бумагоделательных, красильно-отделочных и подъемно-транспортных машин, полимерного оборудования, а также буровых станков и вспомогательных агрегатов экскаваторов).
Режим работы электродвигателей продолжительный S1 по ГОСТ 183. Электродвигатели допускают работу в режимах S2-S8 по ГОСТ183 при условии, что среднеквадратичный ток за цикл не превышает номинальное значение.
Возбуждение электродвигателей независимое 110, 220 В. Степень защиты электрических машин — IP23 по ГОСТ17494, электродвигатели типа 4ППМ, 4ПОМ и 4ПБМ имеют степень защиты IP44, вводное устройство всех типов машин —IP44.
Способ охлаждения электродвигателей IC01, IC06, IC0041, IC0141, IC17, IC37 по ГОСТ20459.
Механические воздействия по группе М8 ГОСТ17516 - 190Е. Электродвигатели выпускаются в конструктивном исполнении IMB3, IMV5, IMV6, IMВ35, IMV1, IMV2, IM1002, IM1012, IM1032, IM2002, IM2012, IM2032 по ГОСТ2479 .