Файл: Отчет по практическим занятиям дисциплины Математическое моделирование систем и процессов.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.02.2024
Просмотров: 13
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
Самарский государственный университет путей сообщения
(СамГУПС)
Кафедра «Вагоны»
ОТЧЕТ
по практическим занятиям
дисциплины «Математическое моделирование систем и процессов»
Вариант № 01
Выполнил: Акимова Н.А.
Группа: ПСЖД-03
Проверил: Балалаев А.Н.
Самара 2022
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ №1
Составление требований к модели системы «Вагон – среда»
Цель занятия: ознакомиться с методами математического моделирования подвижного состава с использованием системного подхода на примере моделирования системы «вагон-среда».
Программа определения оптимального расстояния между ПТО в системе Mathcad при начальных параметрах приведена на рис 1.
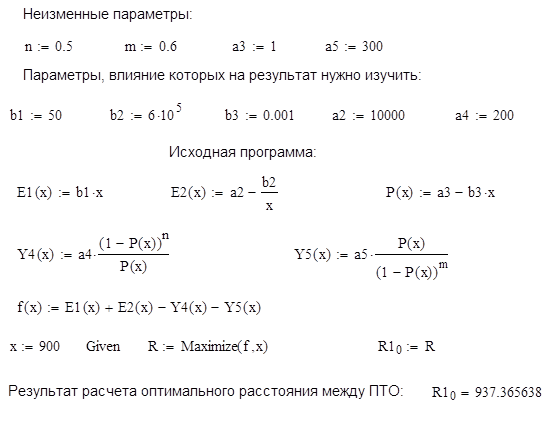
Рис. 1. Листинг программы определения оптимального расстояния между ПТО в системе Mathcad при начальных параметрах
Программа определения оптимального расстояния между ПТО в системе Mathcad при изменении параметра b1 приведена на рис. 2.
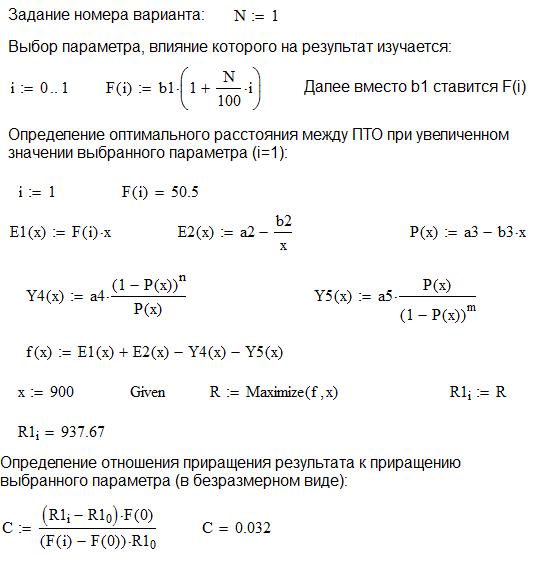
Рис. 2. Листинг программы определения оптимального расстояния между ПТО в системе Mathcad при увеличении параметра b1 на 1% (число, равное номеру варианта)
Программа определения оптимального расстояния между ПТО в системе Mathcad при изменении параметра b2 приведена на рис. 3.
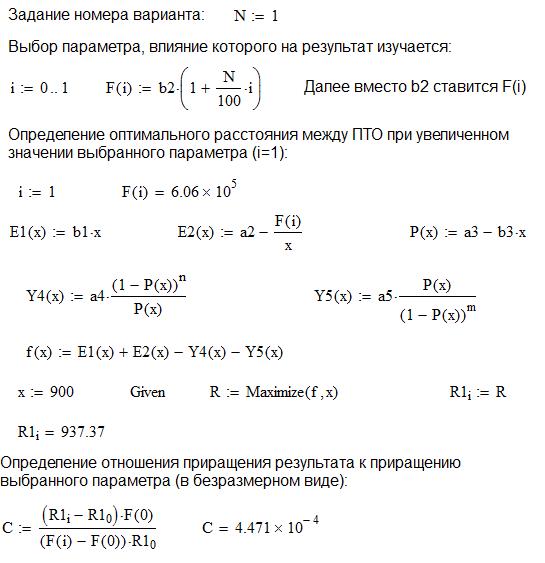
Рис. 3. Листинг программы определения оптимального расстояния между ПТО в системе Mathcad при увеличении параметра b2 на 1% (число, равное номеру варианта)
Программа определения оптимального расстояния между ПТО в системе Mathcad при изменении параметра b3 приведена на рис. 4.
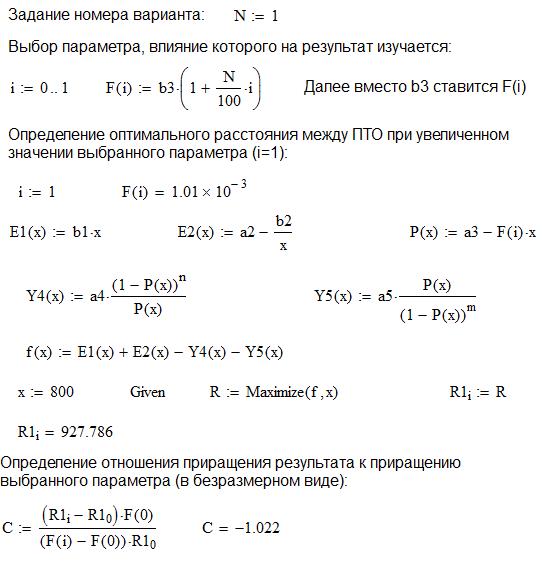
Рис. 4. Листинг программы определения оптимального расстояния между ПТО в системе Mathcad при увеличении параметра b3 на 1% (число, равное номеру варианта)
Программа определения оптимального расстояния между ПТО в системе Mathcad при изменении параметра а2 приведена на рис. 5.
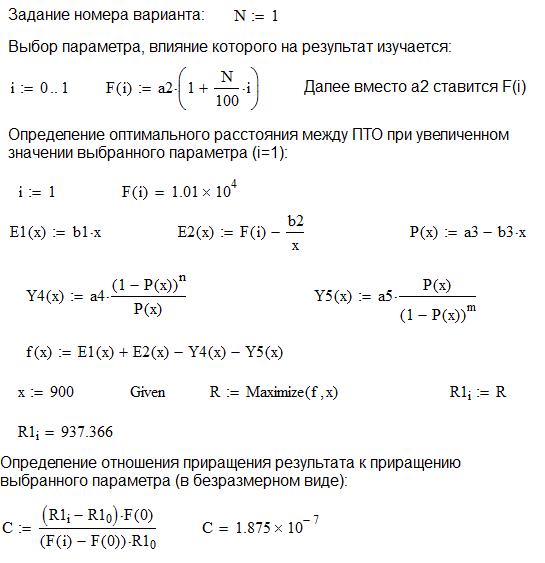
Рис. 5. Листинг программы определения оптимального расстояния между ПТО в системе Mathcad при увеличении параметра а2 на 1% (число, равное номеру варианта)
Программа определения оптимального расстояния между ПТО в системе Mathcad при изменении параметра а4 приведена на рис. 6.
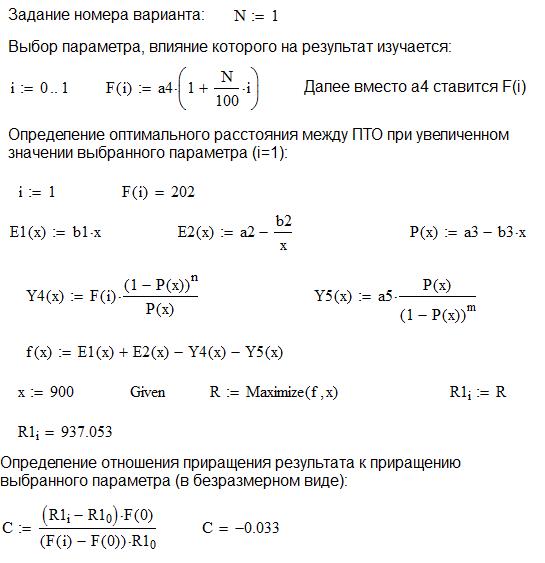
Рис. 6. Листинг программы определения оптимального расстояния между ПТО в системе Mathcad при увеличении параметра а4 на 1% (число, равное номеру варианта)
Выводы: анализ рис. 2 – 6 показал, что при увеличении b1 на 1% безразмерный параметр С увеличивается на 3,2%, при увеличении b2 на 1% безразмерный параметр С увеличивается на 0,0004471%, при увеличении b3 на 1% безразмерный параметр С уменьшается на 102,2%, при увеличении а2 на 1% безразмерный параметр С увеличивается незначительно (изменением можно пренебречь), при увеличении а4 на 1% безразмерный параметр С уменьшается на 3,3%
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ №2
Составление модели надежности вагона в эксплуатации с целью определения оптимальной длины гарантийного участка
Цель занятия: ознакомиться с методами математического моделирования параметров надежности подвижного состава на примере составления модели надежности вагона в эксплуатации.
Исходные данные взяты из таблицы 2 методических указаний № 4954 и внесены в таблицу 1.
Таблица 1 – Исходные данные к расчетам по практическому занятию №2
| Длина L, км | Номер варианта |
| 1 | |
| 870 | 12 |
| 944 | 16 |
| 1040 | 21 |
| 2200 | 39 |
На рисунке 1 показан листинг программы аппроксимации зависимости между вероятностью безотказной работы вагона и длиной гарантийных участков полиномом первой степени:
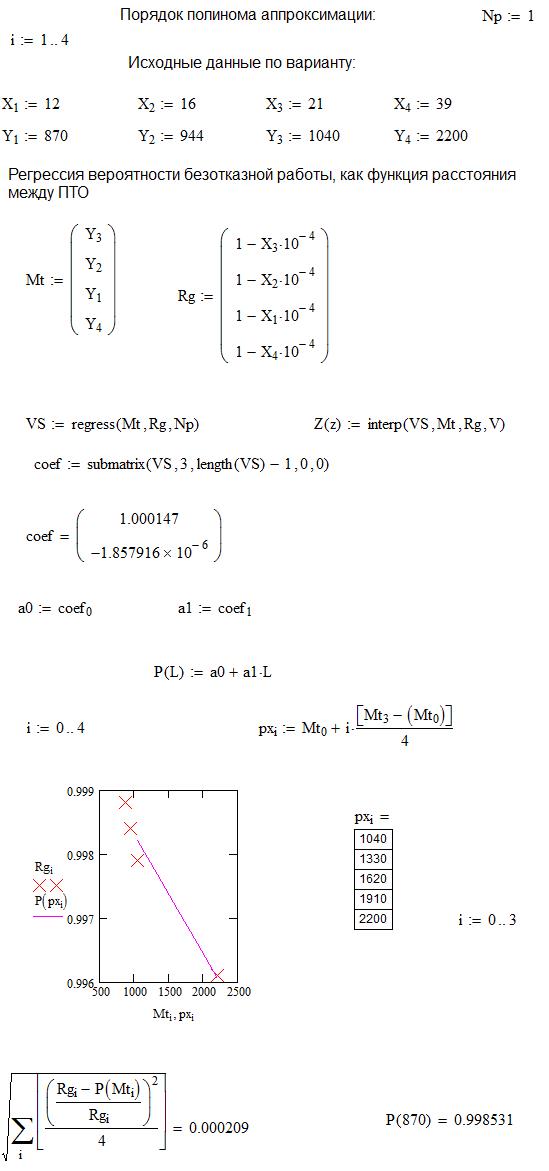
Рис. 1. Листинг программы аппроксимации зависимости между вероятностью безотказной работы вагона и длиной гарантийных участков полиномом первой степени
На рис. 2 показан листинг программы аппроксимации зависимости между вероятностью безотказной работы вагона и длиной гарантийных участков полиномом второй степени:
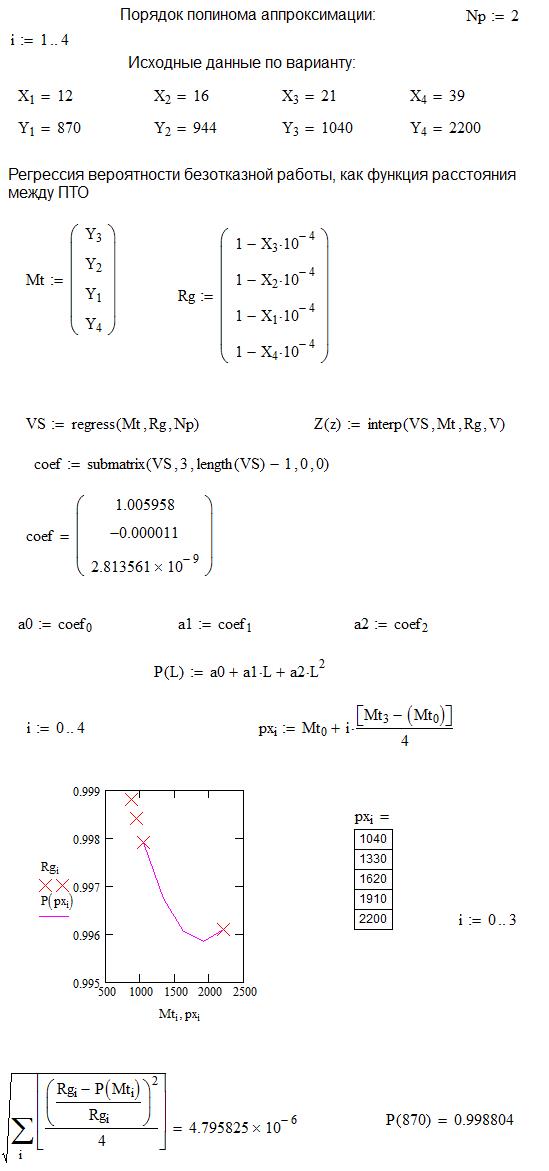
Рис. 2. Листинг программы аппроксимации зависимости между вероятностью безотказной работы вагона и длиной гарантийных участков полиномом второй степени
На рис. 3 показан листинг программы аппроксимации зависимости между вероятностью безотказной работы вагона и длиной гарантийных участков полиномом третьей степени:
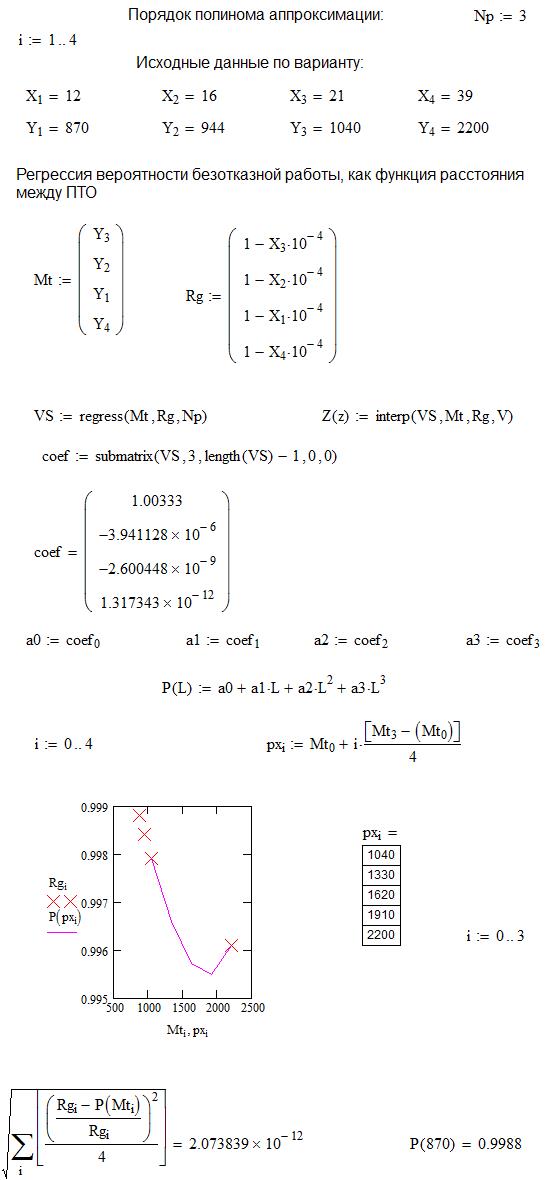
Рис. 3. Листинг программы аппроксимации зависимости между вероятностью безотказной работы вагона и длиной гарантийных участков полиномом третьей степени
Выводы: среднеквадратичная погрешность аппроксимации уменьшается с увеличением порядка аппроксимации, величина вероятности безотказной работы при аппроксимирующем полиноме 1-го порядка равна P(870) = 0,998531 при длине гарантийного плеча 870 км, при полиноме 2-го порядка 0,998804, при полиноме 3-го порядка 0.9988.
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ №3
Составление модели деповского ремонта вагона с целью определения предельной годовой программы ремонта
Цель занятия: овладеть навыками решения уравнений методом деления отрезка пополам на примере определения предельной годовой программы ремонтного депо.
Исходные данные из табл. 3 методических указаний № 4954.
Таблица 1 – Исходные данные к расчетам по практическому занятию №3
| Вариант | m | p | q1 | q2 | N1 |
| 1 | 2 | 3 | 4 | 5 | 6 |
| 1 | 0.08 | 200 | 0.04 | 0.005 | 2000 |
Результаты расчетов по определению предельной годовой программы ремонтного депо в среде Just BASIC v2.0 представлены на рис. 1.
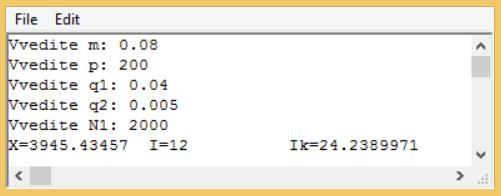
Рис. 1. Результаты расчетов по определению предельной годовой программы ремонтного депо в среде Just BASIC v2.0
Результаты расчетов по определению предельной годовой программы ремонтного депо в среде Mathcad представлены на рис. 2.
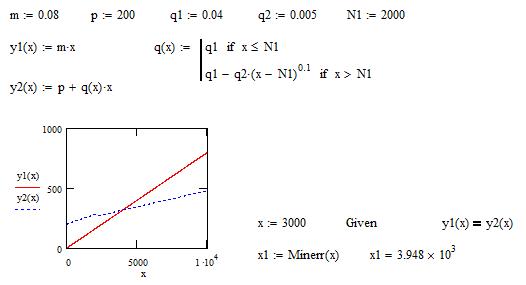
Рис. 2. Результаты расчетов в среде Mathcad
Вывод: предельная годовая программа ремонтного депо, рассчитанная в Just BASIC v2.0, равна 3945.4, а в среде Mathcad – 3948. Относительная разность составила (3945.4 – 3948) / 3948 = 0.000659
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ №4
Составление сетевого графика технологического процесса деповского ремонта полувагона
Цель занятия: ознакомиться с сетевым моделированием процессов ремонта подвижного состава на примере исследования сетевой модели деповского ремонта полувагона.
Исходные данные из табл. 6 методических указаний № 4954.
Таблица 1 – Исходные данные к расчетам по практическому занятию №4
| № операции | Вариант |
| 1 | |
| 1 | 0.2 |
| 2 | 0.5 |
| 3 | 0.8 |
| 4 | 0.4 |
| 5 | 0.8 |
| 6 | 0.6 |
| 7 | 0.3 |
| 8 | 1.3 |
| 9 | 1.3 |
| 10 | 2 |
| 11 | 0.1 |
| 12 | 0.7 |
| 13 | 0.6 |
| 14 | 0.6 |
| 15 | 1.2 |
| 16 | 1.4 |
| 17 | 0.5 |
| 18 | 0.5 |
| 19 | 0.8 |
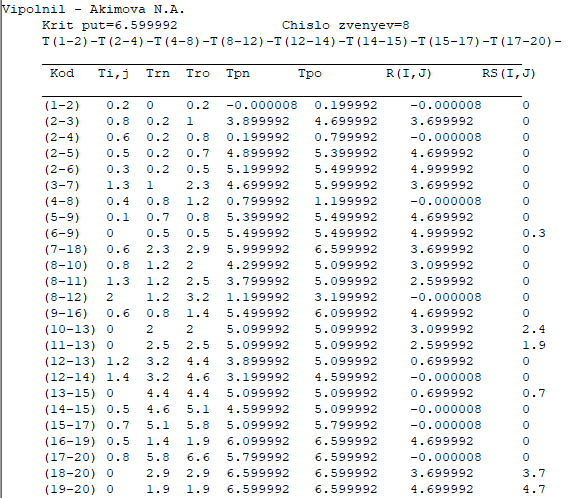
Результаты расчетов критического пути и резервов времени технологического процесса ремонта полувагона показаны на рис. 1.
Рис. 1. Результаты расчета критического пути и резервов времени
Выводы: Максимальный свободный резерв времени выпадает на фиктивную работу Т(19-20), он начинается в 1.9 часа от начала работ и заканчивается в 6.6 часа, продолжается 4.7 часа. Им располагает исполнитель предыдущей работы Т(16-19).
После выполнения работы Т(16-19) этого исполнителя можно переводить на работы критического пути, которые являются «ручными» и время исполнения которых находится в диапазоне резерва времени:
- Т(12-14) начинается в 3.2 часа, заканчивается в 4.6 часа;
- Т(14-15) начинается в 4.6 часа, заканчивается в 5.1 часов;
- Т(17-20) начинается в 5.8 часа, заканчивается в 6.6 часа.
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ №5
Построение оптимального плана эксперимента. Нахождение функции регрессии с помощью теории планирования эксперимента
Цель занятия: ознакомиться с оптимальным планом машинного эксперимента над математической моделью, определить с помощью средств Mathcad функцию регрессии и исследовать функцию регрессии на экстремум по оптимальному плану.
Задана физическая модель, зависящая от трех независимых параметров x, y, z (вид зависимости получен из уравнения
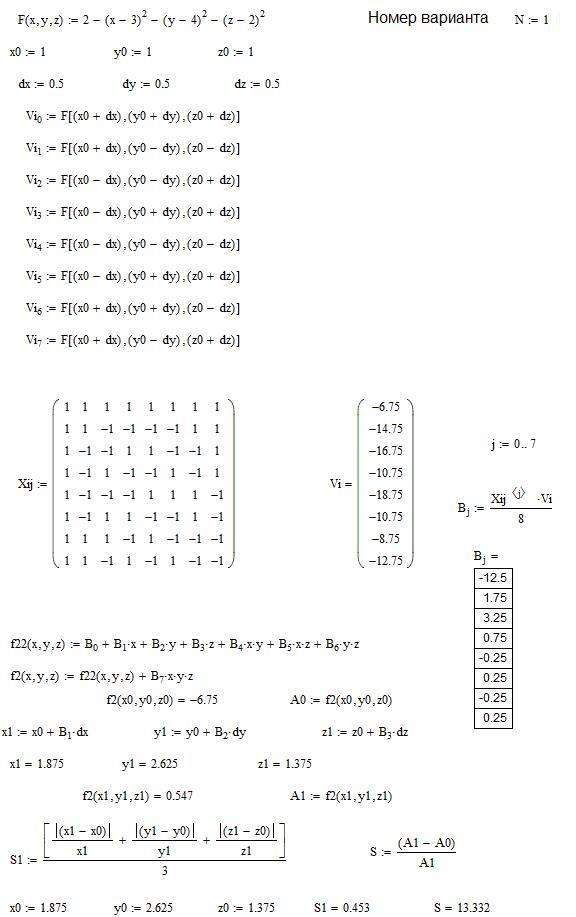
Рис. 1. Листинг программы
Новая базовая точка (x1, y1, z1) находится с учетом направления возрастания функции регрессии f2(x1, y1, z1). Полученные значения новой базовой точки подставляются в начальные значения, то есть x0= x1, y0= y1, z0= z1, копируются и переносятся в начало программы, а старые значения x0, y0, z0 предварительно удаляются. Расчет повторяется несколько раз, пока относительная разность величин (f2(x1, y1, z1) - f2(x0, y0, z0)) / f2(x1, y1, z1) не станет по меньше 0.01, а результаты после замены x0= x1, y0= y1, z0= z1 и подстановки вместо старых значений копируются и вставляются в виде рисунка в отчет. На рис. 2 показаны все результаты расчета для варианта №1.
Р
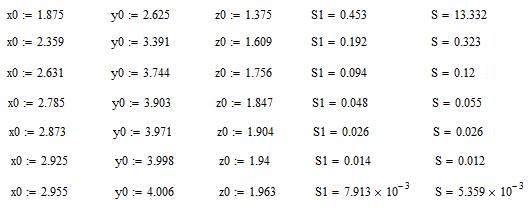
ис. 2. Результаты последовательного поиска оптимальных параметров с помощью теории планирования эксперимента
Выводы: как видно из рис. 2, для исходных значений параметров x0 = 1, y0 =

