Файл: Проверка и запись управляющих программ на носители для эспу.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.02.2024
Просмотров: 22
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Широко применяются в промышленности.
Энкодеры подразделяются на инкрементальные и абсолютные, которые могут достигать очень высокого разрешения.
Инкрементальный энкодер выдает за один оборот определенное количество импульсов. А абсолютные энкодеры позволяют в любой момент времени знать текущий угол поворота оси, в том числе и после пропадания и восстановления питания. А многооборотные абсолютные энкодеры, кроме того, также подсчитывают и запоминают количество полных оборотов оси.
Энкодеры могут быть как оптические, резисторные, так и магнитные и могут работать через шинные интерфейсы или промышленную сеть.
Преобразователи угол-код практически полностью вытеснили применение сельсинов.
Инкрементальные энкодеры предназначены для определения угла поворота вращающихся объектов. Они генерируют последовательный импульсный цифровой код, содержащий информацию относительно угла поворота объекта. Если вал останавливается, то останавливается и передача импульсов. Основным рабочим параметром датчика является количество импульсов за один оборот. Мгновенную величину угла поворота объекта определяют посредством подсчёта импульсов от старта. Для вычисления угловой скорости объекта процессор в тахометре выполняет дифференцирование количества импульсов во времени, таким образом показывая сразу величину скорости, то есть число оборотов в минуту. Выходной сигнал имеет два канала, в которых идентичные последовательности импульсов сдвинуты на 90° относительно друг друга (парафазные импульсы), что позволяет определять направление вращения. Имеется также цифровой выход нулевой метки, который позволяет всегда рассчитать абсолютное положение вала.
На рисунке 1.6 представлен внешний вид инкрементального энкодера.

Рисунок 1.6 - Внешний вид инкрементального энкодера
Абсолютные энкодеры, как оптические, так и магнитные имеют своей основной рабочей характеристикой число шагов, то есть уникальных кодов на оборот и количество таких оборотов, при этом не требуется первичной установки и инициализации датчика. Поэтому абсолютные энкодеры не теряют свою позицию при исчезновении напряжения.
Наиболее распространённые типы выходов сигнала — это код Грея, параллельный код, интерфейсы Profibus-DP, CANopen, DeviceNet, SSI, LWL, через которые также осуществляется программирование датчиков.
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен,т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
На рисунке 1.7 представлен внешний вид абсолютного энкодера.

Рисунок 1.7 - Внешний вид абсолютного энкодера
2 ИССЛЕДОВАНИЕ СХЕМОТЕХНИКИ ЭСПУ
2.1 Разработка структурной схемы ЭСПУ
На рисунке 2.1 представлена структурная схема ЭСПУ NC-110.
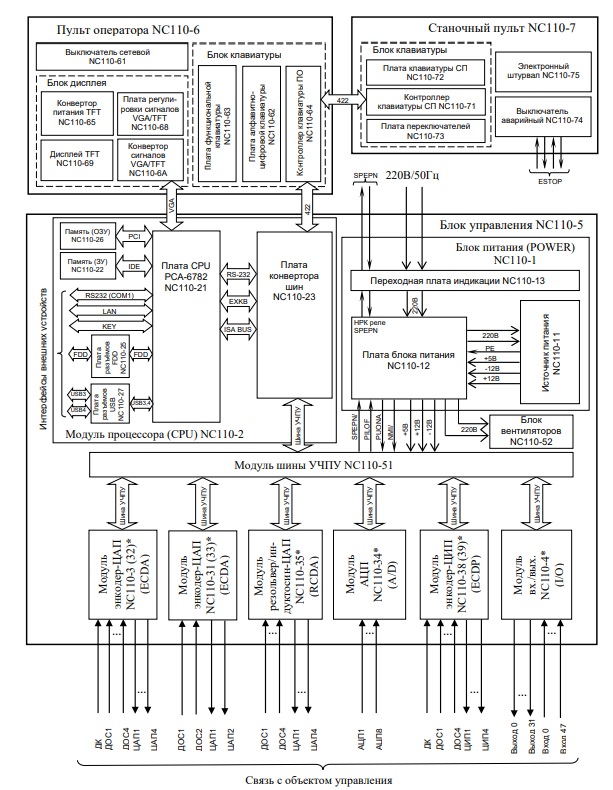
Рисунок 2.1 – Структурная схема ЭСПУ NC-110
Модульная структура БУ позволяет компоновать УЧПУ периферийными модулями в соответствии с требованиями заказчика в пределах диапазона технических характеристик. Таким образом, вариант исполнения УЧПУ определяется заказчиком, и может варьироваться в широком диапазоне.
Блок питания POWER обеспечивает УЧПУ необходимым набором питающих напряжений. Питание от БП на модули БУ поступает через модуль шины УЧПУ. Питание от БП в ПО и СП поступает через канал 422. Кроме этого, БП обеспечивает по каналам ДОС питание датчиков обратной связи в приводах, а также обеспечивает питанием внешние устройства ввода/вывода, подключаемые к каналам FDD и USB.
Взаимодействие платы CPU с модулями БУ обеспечивают сигналы внешней локальной шины процессора ISA BUS, которые через плату конвертора шин NC110-23 выводятся на модуль шины УЧПУ NC110-51.
Управление внешними дополнительными устройствами ввода/вывода производится процессором CPU через интерфейсы внешних устройств RS-232 (порт COM1), FDD, KEY, LAN, USB (порты USB3, USB4), которые выведены на внешние разъёмы модуля CPU.
Модуль шины УЧПУ представляет собой конструктивное решение интерфейса УЧПУ, основу которого составляют сигналы шины ISA BUS и линии шины питания. Модуль шины имеет 8 платомест, он Руководство по эксплуатации NC110 15 конструктивно и электрически объединяет блок питания POWER, модуль процессора CPU и периферийные модули ECDA, RCDA, ECDP, A/D и I/O.
ПрО УЧПУ позволяет обслуживать от 2 до 16 координатных осей управляемого оборудования. В зависимости от типа ДОС в приводах, управляющих координатными осями, применяются различные типы модулей управления осями: ECDA и/или RCDA и/или ECDP.
Модуль A/D NC110-34 применяется для управления устройствами с выходным аналоговым сигналом +10В. Модуль A/D управляет 8 аналоговыми каналами. ПрО УЧПУ позволяет обслуживать от 1 до 2 модулей A/D.
ПрО УЧПУ NC-110 позволяет работать с двумя электронными штурвалами. Кроме штурвала СП, подключённого к штатному каналу штурвала, УЧПУ может работать со штурвалом, подключённым к любому каналу энкодера в модуле ECDA/RCDA/ECDP.
ПО и СП обеспечивают выполнение всех функций управления и контроля в системе «ОПЕРАТОР-УЧПУ-ОБЪЕКТ УПРАВЛЕНИЯ» как в автоматическом, так и в ручном режиме. В качестве элементов управления ПО и СП используются клавиши, кнопки и переключатели, а в качестве элементов контроля – дисплей и светодиоды. Эти элементы позволяют оператору управлять работой системы, вести с ней активный диалог, получать необходимую информацию о ходе управления объектом.
Связь CPU с клавиатурой ПО осуществляется через интерфейс EXKB. Связь CPU с клавиатурой и переключателями СП осуществляется через интерфейс RS-232 (COM2), преобразованный в плате конвертора шин NC110-23 в интерфейс RS-422. Сигналы интерфейсов EXKB и RS-232 передаются в ПО и СП по многофункциональному каналу 422. Через Руководство по эксплуатации NC110 16 этот же канал производится связь БУ с сетевым выключателем ПО NC110-61, со штурвалом NC110-75 и аварийным выключателем СП NC110-74.
2.2 Разработка функциональной схемы заданного субблока (модуля) с описанием назначения каждого узла
Пульт станочный выносной NC110-7 предназначен для регулирования позиции инструмента, управления движением осей и автоматического управления станком.
На рисунке 2.2 представлена принципиальная схема модуля пульта оператора NC110-7.
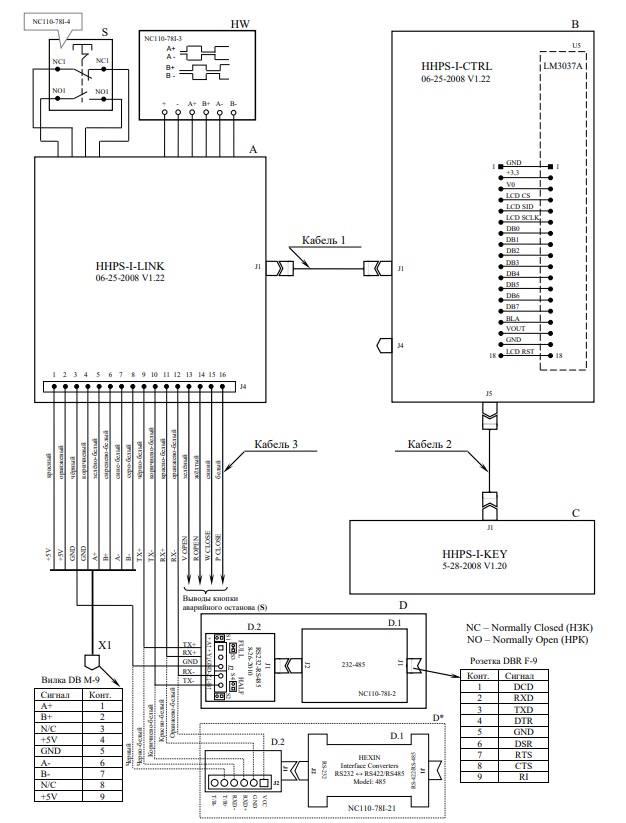
Рисунок 2.2 – Функциональная схема пульта оператора NC110-7.
Расположение элементов платы разъёмов А (HHPS-I-LINK) представлено на рисунке 6.4. Плата разъёмов А обеспечивает распределение сигналов между внешним кабелем и составными частями ВСП. К плате подводится внешний кабель ВСП NC110-78I (кабель 3). Каждый провод кабеля 3 имеет цветовую маркировку. Конец кабеля 3 на плате фиксируется металлическим хомутиком.
В плате В расположен контроллер ВСП (U1), который управляет работой дисплея (U5), работой индикаторов и клавиатуры, установленных на плате С (U2), а также обеспечивает взаимодействие ВСП NC110-78I с процессором УЧПУ по последовательному полнодуплексному каналу связи RS-485 (4-х провода) (U3: MAX489), обеспечивая контроль чётности передаваемой и принимаемой информации.
Микросхема MAX489 представляет собой маломощный полнодуплексный приёмо-передатчик, который позволяет работать как с каналом RS-422, так и с 4-х проводным каналом RS-485. Для работы канала используются два дифференциальных сигнала: +RxD, -RxD - на приём, +TxD, -TxD - на передачу.
Плата клавиатуры С включает в себя 16 клавиш, индикаторы подсветки LED1-LED3 трёх свободно программируемых клавиш «F1»- «F3» и разъём J1 для подключения кабеля 2.
Преобразователь интерфейсов RS232-RS485 (D) предназначен для взаимного электрического преобразования сигналов интерфейса RS232 и RS485.
Разъём D.1: J1 предназначен для подключения к разъёму канала RS-232 (COM1) УЧПУ. Разъём D.2: J2 служит для подключения к каналу RS-485 ВСП NC110-78I. Разъёмы D.1: J2 и D.2: J1 позволяют соединить преобразователь интерфейсов и коммутатор режимов между собой.
Электронный штурвал HW управляет перемещением осей станка в ручном режиме. Он задаёт направление движения «+» (по часовой стрелке) или «-» (против часовой стрелки) и величину перемещения осей.
Сигналы штурвала выведены на разъём X1 (вилка DB M-9) ВСП. Распайка сигналов разъёма X1 показана на рисунке 6.1. Разъём X1 используется для подключения к каналу электронного штурвала или каналу энкодера УЧПУ. Напряжение +5В для питания штурвала и плат ВСП NC110- 78I поступает от УЧПУ по каналу штурвала/энкодера.
Кнопка аварийного останова S имеет две группы контактов с фиксацией: НЗК (NC1) и НРК (NO1). Коммутируемый сигнал – не более 30В/2А. Выводы контактов кнопки аварийного останова S следует подключить к цепи аварийного отключения объекта управления.
2.3 Исследование интерфейса связи (схемный анализ)
VGA (разъём) — 15-контактный субминиатюрный аналоговый разъём для подключения мониторов по стандарту видеоинтерфейса VGA.
VGA работает по обычному принципу горизонтально-вертикальной развёртки. Изменение напряжения на RGB-пинах означает для ЭЛТ изменение интенсивности луча электронных пушек кинескопа и, соответственно, яркости светового пятна на экране, для LCD матрицы изменение яркости свечения пикселей. Максимальное напряжение сигнала RGB-пинов составляет 0,7 В макс (входное сопротивление 75 Ом).
Описывается расположение и назначение 15-штыревого (пинового) разъёма/гнезда VESA DDC2/E-DDC; нумерация в списке соответствует цифрам на иллюстрации справа разъёма-«мамы» справа налево, сверху вниз:
-
RED — красный канал видео; -
GREEN — зелёный канал видео; -
BLUE — синий канал видео; -
ID2/RES — ранее второй бит ID монитора, стал зарезервирован с появлением E-DDC; -
GND — земля горизонтальной синхронизации; -
RED_RTN — земля красного канала; -
GREEN_RTN — земля зелёного канала; -
BLUE_RTN — земля синего канала; -
KEY/PWR — ранее ключ (отсутствовал контакт в вилке), сейчас +5 В постоянного тока для E-DDC (узлы E-DDC работают при отключенном питании монитора); -
GND — земля вертикальной синхронизации и DDC; -
ID0/RES — ранее нулевой бит ID монитора, стал зарезервирован с появлением E-DDC; -
ID1/SDA — ранее первый бит ID монитора, стал использоваться для I²C с появлением DDC2; -
HSync — горизонтальная синхронизация; -
VSync — вертикальная синхронизация; -
ID3/SCL — ранее третий бит ID монитора, линия тактирования I²C с появлением DDC2.
2.4 Разработка принципиальной схемы субблока (модуля) (или схемы подключения)
Инструментом общения оператора с панелью оператора, какому бы терминалу (пассивному, активному) она ни принадлежала, являются дисплей и клавиатура. Клавиатура предназначена для выбора режима работы; ввода алфавитно-цифровых данных; управления курсором с целью редактирования вводимой информации; смены страниц информации, выводимой на дисплей; изменение системы отсчеты, выбора дискретности перемещений; ввода исполнительных команд типа «включить», «выключить», «пуск», «стоп»; задание укрупненных команд типа технологических циклов и др.
Экран дисплея содержит информацию следующего вида: состояние системы управления (указание режима, сообщение об ошибках и сбоях); состояние управляемого объекта, т. е. станка (положение рабочих органов в различных системах координат, подача, частота вращения шпинделя, имена выполняемых циклов автоматики, сведения о выполняемой управляющей программе, текст выполняемого фрагмента управляющей программе); описание всех «прошлых» действии оператора; описание стандартных циклов обработки, включая их графическую интерпретацию; представление статико-графической модели управляющей программы (наложенные эскизы заготовки и изделия с указанием всех рабочих и вспомогательных проходов); представление динамико-графической модели процесса обработки (изображение текущего состояния и его развития в реальном времени).

