ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 7
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Министерство науки и высшего образования РФ
Федеральное государственное автономное
образовательное учреждение высшего образования
«СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
Институт горного дела, геологии и геотехнологий
институт
Маркшейдерского дела
кафедра
РАСЧЕТНО-ГРАФИЧЕСКАЯ ЗАДАНИЕ
по «Маркшейдерия при подземной разработке»
наименование дисциплины
«Определение дирекционного угла гироскопическим способом»
тема
Вариант 6
Преподаватель __________ Д.И. Гуща
подпись, дата инициалы, фамилия
Студенты ГГ 20-09 __________ И.Ю. Элст
номер группы подпись, дата инициалы, фамилия
Красноярск 2022
Теоретические сведения
Гирокомпас (гиротеодолит) - это угломерный инструмент, в котором конструктивно объединён гироскоп и теодолит. Процесс определения дирекционного угла стороны гирокомпасом называют гироскопическим ориентированием.
Определение дирекционного угла стороны подземной сьемки гироскопическим способом может быть произведено на входящей вентиляционной струе в любой точке основных горных выработок.
Работы на станции:
-
Рекогносцировка, зарядка аккумуляторов, транспортировка к месту работы. Установка гирокомпаса на пункте (его горизонтирование и центрирование)
Рекогносцировка проводится до начала работ. Ее цель: выбор схемы проведения работ, выбор исходной и ориентировочных сторон и пунктов для установки гирокомпаса. За исходное направление на поверхности принимают сторону триангуляции или полигонометрии.
Гирокомпас центрируют как обычный теодолит, а ориентированные в сторону севера производится по буссоли или известному дирекционному углу исходной стороны. При этом прибор разворачивается таким образом, что смотровое окно гироприставки будет направлено на запад.
-
Наблюдая через автоколлимационную трубу за биссекторами ЧЭ и корпуса гироприставки при открепленной алидаде, добиваются, чтобы они оба были в поле знания, а не подвижный биссектор совпадал со средним делением шкалы. Этот отсчет называют «отсчетом приведения». После этого алидаду закрепляют, открепляют арретир и наблюдают за колебаниями торсиона при не включенном гиромоторе, делая отсчеты по шкале в точках реверсии n1, n2, n3, n4. Из этих отсчетов в полевых условиях находят среднее значение n0 называемое «нулем реверсии» -
В момент, когда движущиеся биссектор окажется в положении n0, запускают гиромотор и засекают время. В этом положении ручным приводом удерживают биссектор в течении двух минут. После этого винт ручного привода закрепляют, а алидаду теодолита открепляют начинают наблюдения за колебанием ЧЭ, делая в точках реверсии отсчеты по лимбу N1, N2, N3, N4. При этом после взятия отсчета по лимбу N1 устанавливают биссектор корпуса в среднее положение и берут отсчет по лимбу Nк(1) , это же повторяют после взятия отсчета N3, получая Nк(2). -
После второй и четвертой точек реверсии зрительную трубу наводят на пункты В твердой стороны, получая Nв(1) и Nв(2) примычные направления. -
После этого гирокомпас выключают, через 6-8 минут его демонтируют и переносят в шахту. Работа выполняются в подземных условиях в аналогичной последовательности.
Исходные данные:
Дано:
N1= 8 ̊ 40ʹ 18ʺ
N2= 9 ̊ 26ʹ 30ʺ
N3= 8 ̊ 30ʹ 18ʺ
N4= 9 ̊ 26ʹ 30ʺ
n1= 58,4
n2= 31,9
n3= 57,8
n4= 32,2
N= 5 ̊ 51ʹ 34ʺ
Nk= 9 ̊ 01ʹ 15ʺ
nk= 40
D= 16,6
1. Определение нулевого положения подвеса по:



2. Определение среднего значения оси равновесия чувствительного элемента



3. Вычисление среднего значения примычного направления:
4. Вычисление поправки за закругление торсиона:



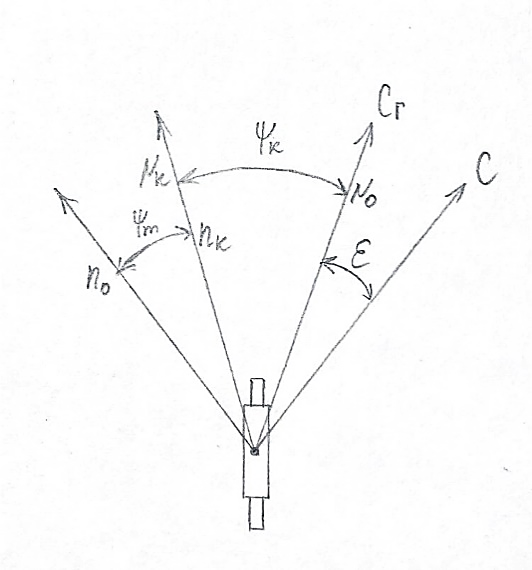
Рисунок 1 – Схема к определению поправки за закручивание торсиона
где
 – угол закручивания подвеса из-за изменения нулевого положения подвеса;
– угол закручивания подвеса из-за изменения нулевого положения подвеса; – угол закручивания подвеса из-за неточного ориентирования корпуса гироблока;
– угол закручивания подвеса из-за неточного ориентирования корпуса гироблока; – поправка на закручивание;
– поправка на закручивание; – отсчёт, соответствующий перпендикулярам к зеркалам на корпусе гироблока в момент положения равновесия свободных колебаний;
– отсчёт, соответствующий перпендикулярам к зеркалам на корпусе гироблока в момент положения равновесия свободных колебаний; – отсчёт, соответствующий в ПР ЧЭ в момент положения равновесия свободных колебаний;
– отсчёт, соответствующий в ПР ЧЭ в момент положения равновесия свободных колебаний; – отсчёт, соответствующий ПР ЧЭ в момент положения равновесия прецессионных колебаний;
– отсчёт, соответствующий ПР ЧЭ в момент положения равновесия прецессионных колебаний; – отсчёт, соответствующий перпендикулярам к зеркалам на корпусе гироблока в момент положения равновесия прецессионных колебаний;
– отсчёт, соответствующий перпендикулярам к зеркалам на корпусе гироблока в момент положения равновесия прецессионных колебаний;

С – истинный меридиан;
Сг – компасный (приборный меридиан).
5. Определение гироскопического азимута линии на поверхности

6. Гирокомпас снимается и переносится в шахту, аналогичные действия повторяются в подземных условиях
Дирекционный угол определяется по формуле
 ,
,где
 -поправка за сближение меридианной.
-поправка за сближение меридианной. ,
,где
 -ординаты установки гирокомпаса на поверхности и в шахте;
-ординаты установки гирокомпаса на поверхности и в шахте; -поправка за сближение меридианов на 1 км по ординате.
-поправка за сближение меридианов на 1 км по ординате.Результаты расчетов занесены в схему.