Файл: Контрольная работа по дисциплине Основы технической диагностики.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 02.02.2024
Просмотров: 31
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

RPO= 0,5 ∙1019,52 = 509,76 для ES
BISO = k ∙ RPO = 0,5 ∙25488 = 12744 для SES
Определяется норма на качественные показатели при вводе в эксплуатацию BISPO:
 для ES
для ES
 для SES
для SES
Определяются отклонения от нормы по формуле:
 для ES
для ES
 для SES
для SES
Определяются пороговые значения S по формуле: S=BISPO-D
Для ES: S=BISPO-D=50,979 – 14,3 = 36,68
Для SES: S=BISPO-D=6372 – 159,65 = 6212,35
Округляются все значения S до ближайшего целого числа ≥0
Для ES: S=37
Для SES: S=6213
Задача 3
1. Определить сетевую предельную норму на дрожание фазы на иерархическом стыке.
2. Определить сетевую предельную норму на дрейф фазы на иерархических стыках за период наблюдения S.
3. Определить допуск на дрожание и дрейф фазы на цифровых входах для заданного стыка и частоты f дрожания и дрейфа фазы.
4. Ответить на вопрос:
4.1 Как измерить фазовое дрожание осциллографическим методом?
4.2 Как измерить фазовое дрожание методом фазового детектора?
4.3 Как измерить фазовое дрожание по критерию увеличения коэффициента ошибок?
4.4 Как измерить фазовое дрожание по критерию появления ошибок?
4.5 Понятие и оценка дрожания и дрейфа фазы в цифровых системах связи.
Исходные данные:
Решение:
Функция фазового дрожания может быть получена путем графического отображения во времени отклонения положения фронта импульса или выбранной точки синусоидального сигнала на выходе контролируемой системы передачи при воздействии на ее вход сигналом с заданным уровнем фазового дрожания. При этом амплитуда фазового дрожания часто выражается в относительных интервальных единицах ЕИ (UI), а не в единицах абсолютного времени, так как в этом случае результат измерения не зависит от действительной скорости передачи данных, что позволяет осуществить сравнение амплитуды фазового дрожания на различных иерархических уровнях в цифровой системе передачи.
В ВОСП встречаются различные типы дрожания фазы, а именно:
-случайное дрожание фазы, которое не зависит от передаваемой последовательности и возникает в следствие шумов, создаваемых электронными элементами регенератора; -детерминированное фазовое дрожание (собственное), которое представляет собой последовательность смещений, создаваемых схемой восстановления тактовой частоты.
Детерминированное дрожание фазы также может возникать вследствие искажений формы сигнала и преобразований амплитуда - фаза - шум. Учитывая, что между терминалами может быть несколько регенераторов, происходит накопление уровня дрожания фазы в зависимости от их количества. Приняв модель не коррелированного дрожания фазы, считаем, что результирующее дрожание фазы пропорционально квадратному корню из количества регенераторов, в то время как при детерминированном дрожании фазы регенераторов результирующее дрожание обычно пропорционально количеству регенераторов. Последний тип дрожания фазы является детерминирующим в реальных системах с большим числом регенераторов.
Джиттер приводит к отсчету цифровых сигналов в не идеальные моменты времени. Это может привести к единичным или серийным ошибкам. Количество регенерированного сигнала так же в значительной степени определяется устойчивостью системных компонентов к джиттеру. Джиттер также может вызывать проскальзывание битов из-за перегрузки или не догрузки динамических буферов. Теоретически, перед возникновением ошибок в отчете вариация может достигать половины текущей ширены бита, который отсчитывается. На практике, критические значения намного меньше благодаря искажению сигнала и дополнительному шуму.
В 1996 году приказом Министерства связи РФ были введены «Нормы на электрические параметры цифровых каналов и трактов магистральной и внутризоновых первичных сетей», регламентирующие основные виды показателей качества цифровых каналов и трактов. Предельные нормы на дрожание фазы на иерархическом стыке приведены в таблице 6.

Таблица 6 - Максимально-допустимое фазовое дрожание на иерархическом стыке
Для ПЦСТ сетевая предельная норма на дрожание фазы на иерархическом стыке - 488 нс.
Зависимость максимально допустимой ошибки временного интервала от периода наблюдения представлена на рис.1, а ее сетевая предельная норма для плезиохронной цифровой иерархии приведена в табл.9.
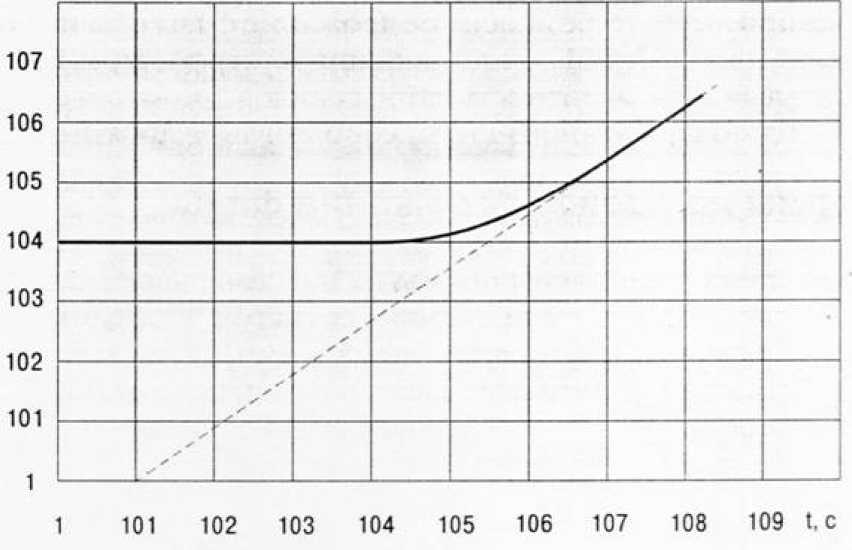
Рисунок 1 - Зависимость максимально-допустимой ошибки временного интервала на входе сетевого узла
Сетевая предельная норма на дрейф фазы на любом иерархическом стыке не была определена и должна быть разработана в дальнейшем. Однако для стыков сетевых узлов определены следующие предельные значения.
Максимальная ошибка временного интервала (МОВИ) на стыках любых сетевых узлов за период наблюдения в S секунд не должна превышать для S >104 МОВИ = (102 * S + 10000) на МОВИ = (102 ∙ 5 ∙ 60 ∙ 60 + 10000) = 1810000 нс
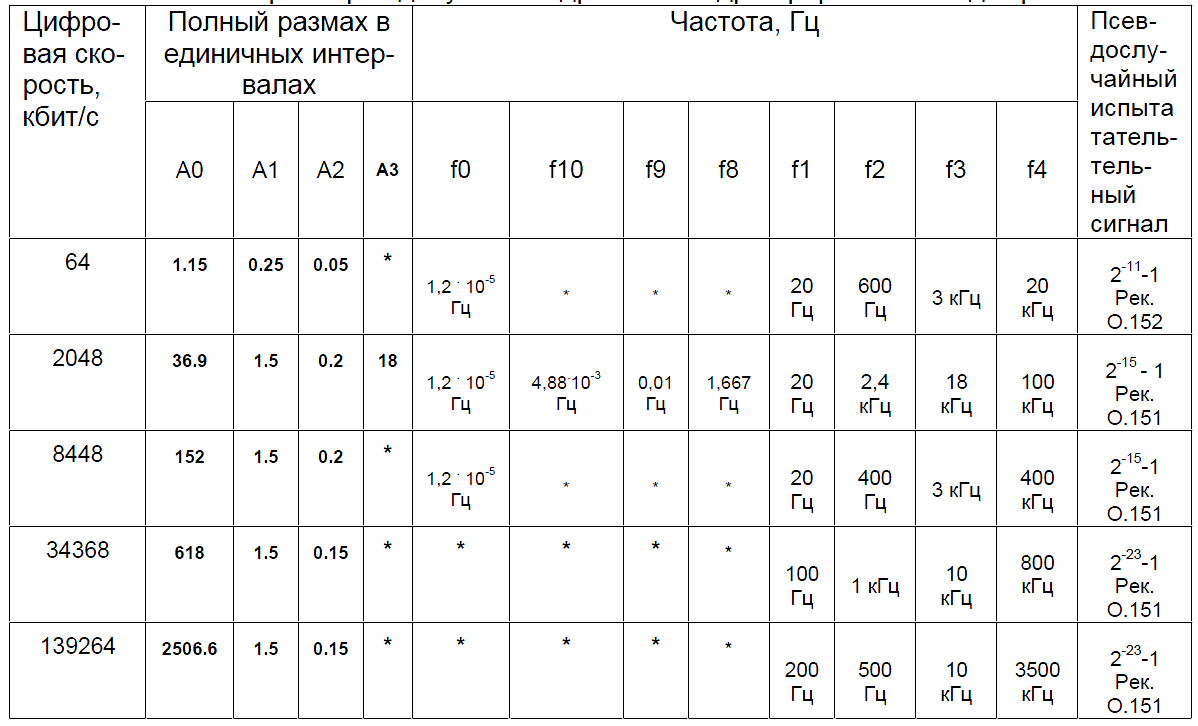
Для ТЦСТ данные определены, скорость 34368 кбит/с.
Таблица 7 – Значения параметров допусков на дрожание и дрейф фазы на входе тракта
Как правило, для каждой скорости передачи задается соответствующее поле допуска устойчивости к входному фазовому дрожанию, а в некоторых случаях и два поля с тем, чтобы была возможность оценивать влияние различных типов регенераторов. При этом разница между полем допуска и действительной кривой устойчивости оборудования представляет собой запас по фазовому дрожанию и характеризует его с точки зрения проходит/не проходит. Обычно при тестировании по устойчивости к фазовому дрожанию используется метод, заключающийся в ослаблении мощности сигнала без фазового дрожания до тех пор, пока не возникнут ошибки или не будет достигнуто определенное значение BER. BER – коэффициент ошибок по битам Кош основной параметр в цифровых системах передачи, равный отношению числа битовых ошибок к общему числу бит, переданных за время проведения тестов по каналу, находящемуся в состоянии готовности. Стандарты SONET/SDH устанавливают определенные значения фазового дрожания и частотных диапазонов, в пределах которых можно проводить измерения на совместимость оборудования.
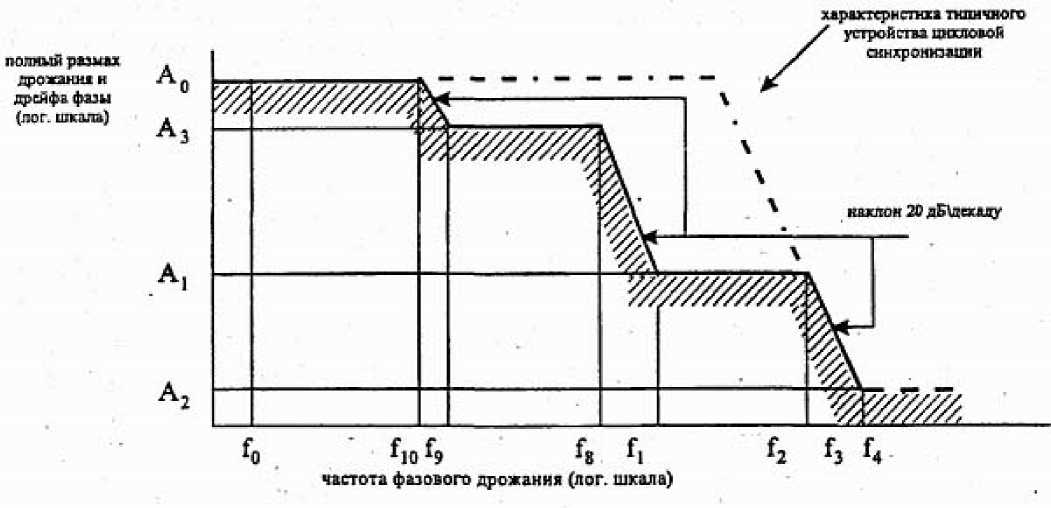
Рисунок 2 - Нижний предел максимально допустимого входного дрожания и дрейфа фазы
Для частоты F=10,8 кГц полный размах в единичных интервалах равен А=1,5дБ.
4.1 Как измерить фазовое дрожание осциллографическим методом?
В результате наличия искажений и действия помех в каналах связи (рис. 35) форма передаваемого сигнала не соответствует принимаемому.
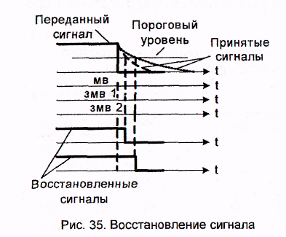
Фронт принимаемого сигнала показан пунктиром (два варианта). Пороговое устройство на выходе канала восстанавливает форму (фронт) сигнала. Изменение знака сигнала при восстановлении определяется при пересечении принятым сигналом порогового уровня. Этот момент пересечения называется значащим моментом восстановления (ЗМВ). В идеале он должен соответствовать моменту восстановления (MB) - идеальному моменту времени, где должно произойти изменение знака восстанавливаемого сигнала. Несоответствие ЗМВ и MB служит оценкой величины фазового дрожания, что положено в основу осциллографического метода измерения.
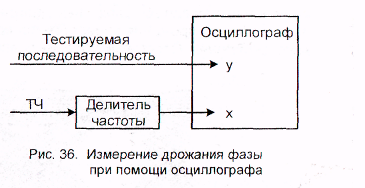
Схема измерения приведена на рис. 36. Независимый от дрожания фазы сигнал запуска развертки осциллографа формируется источником тактовой частоты ТЧ, частота которого равна частоте тестируемой последовательно. Делитель частоты обеспечивает синхронизацию развертки по одному, одна, три и так далее бит. Тестируемая последовательность с искомой величиной фазового дрожания подается HI вход У.
В результате на экране так называемая глазковая диаграмма, принцип построения которой приведен на рис. 37.
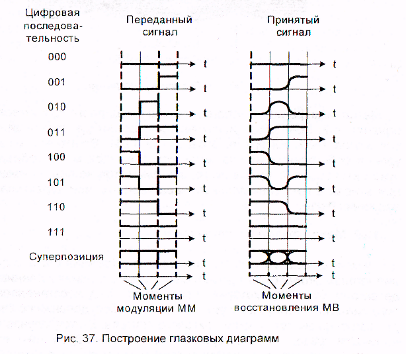
Информационная последовательность разбита по три бита и представлена слева. В центре расположены идеальные сигналы на выходе передатчика в соответствии с цифровым кодом. Принятые из линии сигналы показаны справа. Синхронизация осциллографа осуществляется с частотой в фи раза меньше тактовой. Таким образом, на экране наблюдаются сигналы по три бита. В строке «суперпозиция» показаны сигналы, наложенные друг на друга. Это можно обеспечить в запоминающих осциллографах.
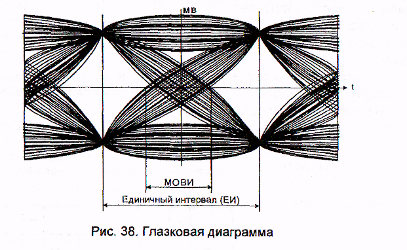
В укрупненном масштабе глазковая диаграмма приведена на рис. 38. Величина фазового дрожания определяется «размытостью» значащих моментов восстановления. Пороговый уровень совпадает с осью t.
BISO = k ∙ RPO = 0,5 ∙25488 = 12744 для SES
Определяется норма на качественные показатели при вводе в эксплуатацию BISPO:
для ES для SESОпределяются отклонения от нормы по формуле:
для ES для SESОпределяются пороговые значения S по формуле: S=BISPO-D
Для ES: S=BISPO-D=50,979 – 14,3 = 36,68
Для SES: S=BISPO-D=6372 – 159,65 = 6212,35
Округляются все значения S до ближайшего целого числа ≥0
Для ES: S=37
Для SES: S=6213
Задача 3
1. Определить сетевую предельную норму на дрожание фазы на иерархическом стыке.
2. Определить сетевую предельную норму на дрейф фазы на иерархических стыках за период наблюдения S.
3. Определить допуск на дрожание и дрейф фазы на цифровых входах для заданного стыка и частоты f дрожания и дрейфа фазы.
4. Ответить на вопрос:
4.1 Как измерить фазовое дрожание осциллографическим методом?
4.2 Как измерить фазовое дрожание методом фазового детектора?
4.3 Как измерить фазовое дрожание по критерию увеличения коэффициента ошибок?
4.4 Как измерить фазовое дрожание по критерию появления ошибок?
4.5 Понятие и оценка дрожания и дрейфа фазы в цифровых системах связи.
Исходные данные:
| № задания | | Вариант |
| 2 | ||
| 1 | Тракт | ПЦСТ |
| 2 | S, час | 5 |
| 3 | Тракт | ТЦСТ |
| F, кГц | 10,8 | |
| 4 | | 4.1 |
Решение:
-
Как известно, фазовое дрожание (джиттер) определяется как кратковременные фазовые отклонения цифрового сигнала от его идеального состояния во времени с частотами выше 10Гц. Значимой при этом может быть любая удобная и легко определяемая точка сигнала, находящаяся, например, на переднем или заднем фронте импульса. Вторым параметром, тесно связанным с фазовым дрожанием, является дрейф фазы (вандер), который обычно относится к долговременным изменениям фазы сигнала. Хотя не существует стандартизированной границы, отличающей фазовое дрожание от дрейфа фазы, последний обычно рассматривают как фазовые отклонения ниже 10 Гц.
Функция фазового дрожания может быть получена путем графического отображения во времени отклонения положения фронта импульса или выбранной точки синусоидального сигнала на выходе контролируемой системы передачи при воздействии на ее вход сигналом с заданным уровнем фазового дрожания. При этом амплитуда фазового дрожания часто выражается в относительных интервальных единицах ЕИ (UI), а не в единицах абсолютного времени, так как в этом случае результат измерения не зависит от действительной скорости передачи данных, что позволяет осуществить сравнение амплитуды фазового дрожания на различных иерархических уровнях в цифровой системе передачи.
В ВОСП встречаются различные типы дрожания фазы, а именно:
-случайное дрожание фазы, которое не зависит от передаваемой последовательности и возникает в следствие шумов, создаваемых электронными элементами регенератора; -детерминированное фазовое дрожание (собственное), которое представляет собой последовательность смещений, создаваемых схемой восстановления тактовой частоты.
Детерминированное дрожание фазы также может возникать вследствие искажений формы сигнала и преобразований амплитуда - фаза - шум. Учитывая, что между терминалами может быть несколько регенераторов, происходит накопление уровня дрожания фазы в зависимости от их количества. Приняв модель не коррелированного дрожания фазы, считаем, что результирующее дрожание фазы пропорционально квадратному корню из количества регенераторов, в то время как при детерминированном дрожании фазы регенераторов результирующее дрожание обычно пропорционально количеству регенераторов. Последний тип дрожания фазы является детерминирующим в реальных системах с большим числом регенераторов.
Джиттер приводит к отсчету цифровых сигналов в не идеальные моменты времени. Это может привести к единичным или серийным ошибкам. Количество регенерированного сигнала так же в значительной степени определяется устойчивостью системных компонентов к джиттеру. Джиттер также может вызывать проскальзывание битов из-за перегрузки или не догрузки динамических буферов. Теоретически, перед возникновением ошибок в отчете вариация может достигать половины текущей ширены бита, который отсчитывается. На практике, критические значения намного меньше благодаря искажению сигнала и дополнительному шуму.
В 1996 году приказом Министерства связи РФ были введены «Нормы на электрические параметры цифровых каналов и трактов магистральной и внутризоновых первичных сетей», регламентирующие основные виды показателей качества цифровых каналов и трактов. Предельные нормы на дрожание фазы на иерархическом стыке приведены в таблице 6.
Таблица 6 - Максимально-допустимое фазовое дрожание на иерархическом стыке
| Скорость в тракте, кбит/с | Сетевая предельная норма | Полоса измерительного фильтра | Единичный интервал, (ЕИ), нс | |||||
| В1 Полный размах, ЕИ | В2 Полный размах, ЕИ | f1, Гц | f3, кГц | f4, кГц | | |||
| 64 | 0,25 | 0,05 | 20 | 3 | 20 | 15600 | ||
| 2048 | 1,5 | 0,2 | 20 | 18 | 100 | 488 | ||
| 8448 | 1.5 | 0,2 | 20 | 3 | 400 | 118 | ||
| 34368 | 1,5 | 0,15 | 100 | 10 | 800 | 29,2 | ||
| 139264 | 1,5 | 0,075 | 200 | 10 | 3500 | 7,18 | ||
Для ПЦСТ сетевая предельная норма на дрожание фазы на иерархическом стыке - 488 нс.
-
Максимальная ошибка временного интервала (МОВИ) на стыках любых сетевых устройств за период наблюдения s > 104 секунд не должна превышать (102 1 s + 104) нс. Здесь максимальная ошибка временного интервала ДТ = max[x(t)] - min[x(t)] определяется амплитудным значением изменения времени запаздывания хронирующего сигнала между двумя пиковыми отклонениями относительно идеального хронирующего сигнала в течение времени s. При этом полный размах измеряется на выходе полосовых фильтров с частотами среза: нижней f и верхней f4, а также нижней f3 и верхней f4, соответственно.
Зависимость максимально допустимой ошибки временного интервала от периода наблюдения представлена на рис.1, а ее сетевая предельная норма для плезиохронной цифровой иерархии приведена в табл.9.
Рисунок 1 - Зависимость максимально-допустимой ошибки временного интервала на входе сетевого узла
Сетевая предельная норма на дрейф фазы на любом иерархическом стыке не была определена и должна быть разработана в дальнейшем. Однако для стыков сетевых узлов определены следующие предельные значения.
Максимальная ошибка временного интервала (МОВИ) на стыках любых сетевых узлов за период наблюдения в S секунд не должна превышать для S >104 МОВИ = (102 * S + 10000) на МОВИ = (102 ∙ 5 ∙ 60 ∙ 60 + 10000) = 1810000 нс
-
Допуск на дрожание и дрейф фазы на цифровых входах определяется таблицей 10 и трактов магистральной и внутризоновых первичных сетей»).
Для ТЦСТ данные определены, скорость 34368 кбит/с.
Таблица 7 – Значения параметров допусков на дрожание и дрейф фазы на входе тракта
Как правило, для каждой скорости передачи задается соответствующее поле допуска устойчивости к входному фазовому дрожанию, а в некоторых случаях и два поля с тем, чтобы была возможность оценивать влияние различных типов регенераторов. При этом разница между полем допуска и действительной кривой устойчивости оборудования представляет собой запас по фазовому дрожанию и характеризует его с точки зрения проходит/не проходит. Обычно при тестировании по устойчивости к фазовому дрожанию используется метод, заключающийся в ослаблении мощности сигнала без фазового дрожания до тех пор, пока не возникнут ошибки или не будет достигнуто определенное значение BER. BER – коэффициент ошибок по битам Кош основной параметр в цифровых системах передачи, равный отношению числа битовых ошибок к общему числу бит, переданных за время проведения тестов по каналу, находящемуся в состоянии готовности. Стандарты SONET/SDH устанавливают определенные значения фазового дрожания и частотных диапазонов, в пределах которых можно проводить измерения на совместимость оборудования.
Рисунок 2 - Нижний предел максимально допустимого входного дрожания и дрейфа фазы
Для частоты F=10,8 кГц полный размах в единичных интервалах равен А=1,5дБ.
4.1 Как измерить фазовое дрожание осциллографическим методом?
В результате наличия искажений и действия помех в каналах связи (рис. 35) форма передаваемого сигнала не соответствует принимаемому.
Фронт принимаемого сигнала показан пунктиром (два варианта). Пороговое устройство на выходе канала восстанавливает форму (фронт) сигнала. Изменение знака сигнала при восстановлении определяется при пересечении принятым сигналом порогового уровня. Этот момент пересечения называется значащим моментом восстановления (ЗМВ). В идеале он должен соответствовать моменту восстановления (MB) - идеальному моменту времени, где должно произойти изменение знака восстанавливаемого сигнала. Несоответствие ЗМВ и MB служит оценкой величины фазового дрожания, что положено в основу осциллографического метода измерения.
Схема измерения приведена на рис. 36. Независимый от дрожания фазы сигнал запуска развертки осциллографа формируется источником тактовой частоты ТЧ, частота которого равна частоте тестируемой последовательно. Делитель частоты обеспечивает синхронизацию развертки по одному, одна, три и так далее бит. Тестируемая последовательность с искомой величиной фазового дрожания подается HI вход У.
В результате на экране так называемая глазковая диаграмма, принцип построения которой приведен на рис. 37.
Информационная последовательность разбита по три бита и представлена слева. В центре расположены идеальные сигналы на выходе передатчика в соответствии с цифровым кодом. Принятые из линии сигналы показаны справа. Синхронизация осциллографа осуществляется с частотой в фи раза меньше тактовой. Таким образом, на экране наблюдаются сигналы по три бита. В строке «суперпозиция» показаны сигналы, наложенные друг на друга. Это можно обеспечить в запоминающих осциллографах.
В укрупненном масштабе глазковая диаграмма приведена на рис. 38. Величина фазового дрожания определяется «размытостью» значащих моментов восстановления. Пороговый уровень совпадает с осью t.