ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 15.03.2024
Просмотров: 10
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное учреждение
высшего образования «Национальный исследовательский Нижегородский государственный университет им. Н.И. Лобачевского»
Институт информационных технологий, математики и механики
Направление подготовки: «Прикладная математика и информатика»
Профиль подготовки: «Математическое моделирование динамики систем и процессов управления»
Практическое задание №1
по дисциплине «Робастное управление»
«Построение управления с интерактивным обучением»
Выполнили:
Балашов А.А.
Куликов Д.А.
Зеленцов Н.Г.
Проверил:
преподаватель
Пакшин П.В.
Нижний Новгород
2022 г.
Содержание
Теоретические сведения 2
Порядок выполнения работы 3
Заключение 9
Список использованных источников 10
Построить модель системы интерактивного управления с обучением для портального робота из [1, стр. 193].
Теоретические сведения
В рассматриваемой задаче рассматривается пример эксперимента с автоматизацией портального робота из лаборатории Саутгемптонского университета. Задачей робота является установка предметов из условного «ящика» на конвейерную ленту с заданной точностью.
Управление роботом осуществляется по сигналам обратной связи в ортогональной системе координат x-y-z.
Рассмотрим интерактивное управление по оси y – горизонтальной оси трехмерной системы. На рисунке 1 показана траектория желаемого перемещения – участок синусоиды.
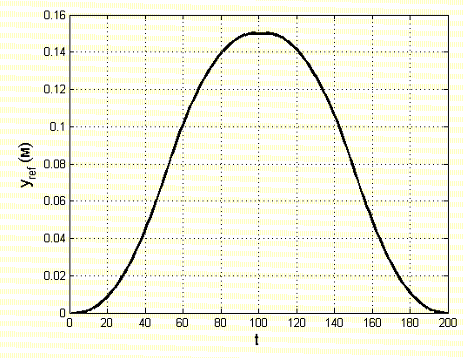
Рисунок 1 – Проекция траектории по оси y
Передаточная функция электропривода горизонтальной степени свободы робота:
| |  | (1) |
Для реализации управления будем рассматривать дискретизированную систему с шагом дискретизации
 с.
с.Дискретную модель получим, введя передаточную функцию в MatLab в виде объекта tf. Затем преобразуем объект в пространство состояний State Space (ss), а затем, дискретизуем модель функцией c2d. Мерой точности является ошибка обучения.
| |  | (2) |
где ek – значение ошибки в момент времени t.
N – количество отсчетов.
Порядок выполнения работы
-
Уравнение объекта в непрерывном пространстве состояний для решения задачи воспользуемся следующими зависимостями:
| |   | (3) |
Дискретизация приводит к замене в (2) непрерывного времени дискретным nΔTс
Приращение дискретного управления определяется из закона:
| |  | (4) |
Ошибка интерактивного обучения определяется, как разность выходного управления на текущем и предыдущем шагах:
| |  | (5) |
При интерактивном управлении закон управления определяется выражением:
| |  . . | (6) |

Где Ki – вычисляемые в процессе интерактивного обучения коэффициенты управления. Как видим, управление линейное.
2. Численный эксперимент проводился при следующих условиях. Матрицы Qи R имеют следующий вид:
Число шагов интегрирования изменяется от 1 до 100, время интегрирования – от 0 до 200 с.
В итоге было получено управление
 , при этом
, при этом
Как видно из рис. 3, среднеквадратическая ошибка уменьшается в 10 раз менее чем за 15 повторений.
Для получения коэффициентов численного эксперимента, напишем функцию Calculate_K.m, текст которой приведен ниже
function out = calculateK(A,B,C,Q,R)
%Задаем начальное приближение коэффициентов
A_ = [[A;-C*A] [zeros(3,1);eye(1)]];
B_ = [B;-C*B];
C_ = [[C;zeros(1,3)] [zeros(1);eye(1)]];
% Вычисляем матрицы для работы пакета yalmip - матрицы цели и начальных
% условий
X = sdpvar(4, 4);
Y = sdpvar(1, 2);
Z = sdpvar(2, 2);
%Рассчитываем матрицы коэффициентов метода наименьших квадратов
n11 = X;
n12 = (A_*X+B_*Y*C_)';
n13 = X;
n14 = (Y*C_)';
part1 = [[n11 n12] [n13 n14]];
%Находим целевые матрицы
n21 = A_*X+B_*Y*C_;
n22 = X;
n23 = zeros(4,4);
n24 = zeros(4,1);
%Матрицы начальных приближений
n31 = X; %Вектор начальных условий
n32 = zeros(4,4); %Нулевая матрица для записи коэффициентов
n33 = inv(Q);
n34 = zeros(4,1); %
part2 = [[n21;n31] [n22;n32] [n23;n33] [n24;n34]];
n41 = Y*C_;
n42 = zeros(1,4);
n43 = zeros(1,4);
n44 = inv(R);
part3 = [[n41 n42] [n43 n44]];
LMN = [part1;part2;part3]; %Настраиваем параметры модуля решения
Constraints = [LMN >= 0, C_*X == Z*C_, X >= 0];
%Блок получения решения
%Запуск процедуры оптимизации
optimize(Constraints, [], sdpsettings('verbose',0));
%Сохранение коэффициентов робастного управления
K = value(Y) * inv(value(Z));
out = K;
end
Результат тестирования функции показан на рис. 2 и рис. 3.
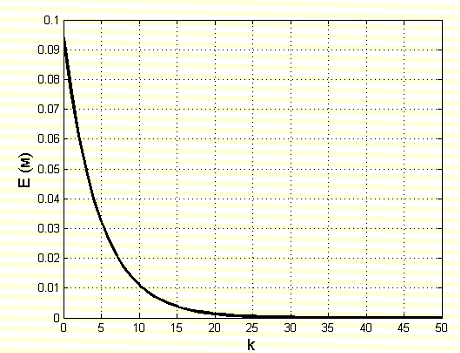
Рисунок 2 - Изменение среднеквадратической ошибки обучения в зависимости от числа повторений
-
Ниже приведен текст основной программы, и результаты ее работы
%Задаем коэффициенты исходной системы управления%
a1 = 426.7;
a2 = 1.744 * 10^5;
a3 = 0;
c1 = 0;
c2 = 23.7356;
c3 = 661.2*23.7356;
% Расчетные значения матриц системы
A = [
0, 1, 0;
0, 0, 1;
-a3, -a2, -a1;
];
B = [0; 0; 1];
C = [c3, c2, c1];
%Рассчитываем дискретную систему
D=[0];
%Задаем систему в пространстве состояний
SYSC=ss(A,B,C,D);
TS=0.01; %Шаг дискретизации
SYSD = c2d(SYSC,TS,'zoh'); %Выполняем дискретизацию системы
%Извлекаем из объекта значения дискретных матриц
A=SYSD.a;
B=SYSD.b;
C=SYSD.c;
D=SYSD.d;
Q = diag([1 1 1 50]);
R = 10^(-3);
%Рассчитываем коэффициенты робастного управления
K = calculateK(A,B,C,Q,R);
x_k = zeros(3,1);
k_max = 100; %Число шагов алгоритма
t_max = 200; %Время моделирования
k_range = 0:k_max;
t_range = 0:t_max;
y_ref = sin(t_range / (t_max / pi)) * 1.0/7.0; %Входное гармоническое воздействие
f1 = figure;
%Строим график гармонического воздействия
figure(f1);
plot(t_range, y_ref)
xlabel('t')
ylabel('Yref (Рј)')
E = [];
Y = zeros(length(k_range), length(t_range));
U = zeros(length(k_range), length(t_range));
E_K_ = zeros(length(k_range), length(t_range));
%Готовим массивы для 3D-графика
for k = 2:length(k_range)
E_k = [];
for t = 1:length(t_range)-1
Y(k,t) = C*x_k;
U(k,t) = U(k-1,t)+K(1)*(Y(k,t)-Y(k-1,t))+K(2)*(y_ref(t+1)-Y(k-1, t+1));
x_k_next = A*x_k + B*U(k,t);
x_k = x_k_next;
e_k = y_ref(t) - Y(k,t);
E_K_(k,t) = e_k;
E_k = [E_k, e_k];
end
E_k = E_k.^2;
E_k = (sum(E_k)/length(E_k))^0.5;
E = [E, E_k];
end
%Строим графики
f2 = figure;
figure(f2);
plot(0:length(E)-1, E);
ylim([0 0.1]);
xlim([0 100]);
xlabel('k')
ylabel('E (Рј)')
grid on
[T_,K_] = meshgrid(t_range, k_range);
f3 = figure;
figure(f3);
surf(T_, K_, U)
xlabel('t')
ylabel('k')
zlabel('u')
shading interp
f4 = figure;
figure(f4);
surf(T_, K_, Y)
xlabel('t')
ylabel('k')
zlabel('y')
shading interp
f5 = figure;
figure(f5);
s = surf(T_, K_, E_K_);
xlabel('t')
ylabel('k')
zlabel('e (Рј)')
shading interp
Рисунок 1 - Изменение управляющего воздействия в зависимости от числа повторений

Рисунок 5 - Изменение выходной переменной в зависимости от числа повторений
Рисунок 6 - Изменение ошибки обучения в зависимости от числа повторений
Заключение
В ходе лабораторной работы было построено оптимальное интерактивное управление с обучением для управления одной из координат электропривода робота. Достигнут минимум среднеквадратической ошибки. Метод интерактивного обучения показал достаточно высокие результаты по скорости сходимости и достижения необходимого функционала качества.
Список использованных источников
-
Емельянова Ю.П., Пакшин П.В. УПРАВЛЕНИЕ С ИТЕРАТИВНЫМ ОБУЧЕНИЕМ -
https://yalmip.github.io/