ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.04.2024
Просмотров: 107
Скачиваний: 0
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
УЛЬЯНОВСКИЙ ИНСТИТУТ ГРАЖДАНСКОЙ АВИАЦИИ ИМЕНИ ГЛАВНОГО МАРШАЛА АВИАЦИИ Б.П. БУГАЕВА
Кафедра Авиационной Техники
Расчётно-графическая работа
по учебной дисциплине «Радиооборудование воздушных судов и его летная эксплуатация»
Вариант 10
Выполнил: курсант группы П-15-1
Гасанов Ш.А (П-15/10)
Проверил: доцент
Ефимов А.В.
Ульяновск 2017 г.
Задание
1. Назначение,
состав, эксплуатационные возможности
и характеристики СВРЛ с общим запросом
для целей УВД и дискретно-адресным
запросом (режим «S»).
Назначение.
Общие сведения и эксплуатационно-технические характеристики.
Системы вторичной радиолокации СВРЛ входят в состав аппаратуры управления воздушным движением (УВД). К ним относится комплекс технических средств для определения координат ВС, их индивидуального опознавания и автоматического получения некоторых других данных о состоянии ВС.
Система содержит наземный комплекс технических средств – вторичный радиолокатор и бортовой ответчик, предназначенный для приёма сигналов запроса, декодирования их содержания, формирования ответных сигналов на основе информации ботовых датчиков и излучения сигналов ответа.
На основе данных СВРЛ служба УВД получает и обрабатывает информацию о ВС, находящихся в контролируемой области воздушного пространства, определяет координаты ВС, оборудованных ответчиками, высоту полёта, запас топлива, оперативные данные в случае нештатных ситуаций.
Вторичный радиолокатор (ВРЛ) выполняет функцию запросчика и формирует кодированный сигнал, содержащий тип запрашиваемой информации. Сформированный сигнал излучается антенной с узкой диаграммой направленности в горизонтальной плоскости. Ответный сигнал, поступающий на ВРЛ, позволяет определить азимут и наклонную дальность до ВС, а декодирование дополнительной информации – высоту полёта, бортовой номер, запас топлива и другие данные.
Трассовые ВРЛ обеспечивают дальность действия 400 км, а аэродромные – 100 км.
Таким образом, ВРЛ является радиолокатором с активным ответом, что позволяет увеличить дальность действия при данной мощности, излучаемой передатчиком, и данной чувствительности приёмника.
Мощность сигнала, принимаемого на борту ВС, определяется зависимостью:
Рпрм = П1Аб, (1.1)
где П1 – плотность потока излучения в точке нахождения ВС;
Аб – эффективная площадь бортовой антенны.
Для обеспечения надёжной работы СВРЛ необходимо, чтобы мощность принимаемого сигнала в k раз превышала чувствительность бортового приёмника Рпрм min б или:
Рпрм = kРпрм min . (1.2)
Для запросного канала можно получить следующие энергетические условия работы:
Рпрм = kРпрм min = Рпрд ЗGЗАб/(4D2), (1.3)
где
Рпрд З – мощность, излучаемая наземным передатчиком;
G – коэффициент направленного действия наземной антенны;
D – дальность распространения излученного сигнала от ВРЛ до ВС.
Из выражения (1.3) можно определить дальность действия ВРЛС:
D = Рпрд ЗGЗАб/4kРпрм min б. (1.4)
Данное соотношение показывает, что требуемая мощность излучения пропорциональна квадрату расстояния до ВС, в то время как для первичных РЛС требуемая мощность излучения пропорциональна четвёртой степени дальности.
Соотношение между мощностью передатчика и чувствительностью приёмника имеет вид:
Рпрд З/Рпрм min б = 4kDGЗАб. (1.5)
Коэффициент направленного действия наземной антенны связан с эффективной площадью антенны соотношением:
GЗ = 4АЗ/2, (1.6)

где - длина волны излучаемого сигнала.
После подстановки в (1.5) получим:
Рпрд З/Рпрм min б = kD22/АЗАб. (1.7)
Индекс «З» обозначает «земля», а «б» - борт.
Для радиоканала бортовой ответчик – наземный приёмник справедлива аналогичная формула:
Рпрд б/Рпрм min З = kD22/АбАЗ, (1.8)
где Рпрд б – мощность излучения бортового передатчика
Рпрм min З – чувствительность наземного приёмника.
Приведённые выражения являются упрощёнными, поскольку они не учитывают отражающих свойств земной поверхности и местных предметов при распространении сигнала и направленных свойств наземной антенны в вертикальной плоскости.
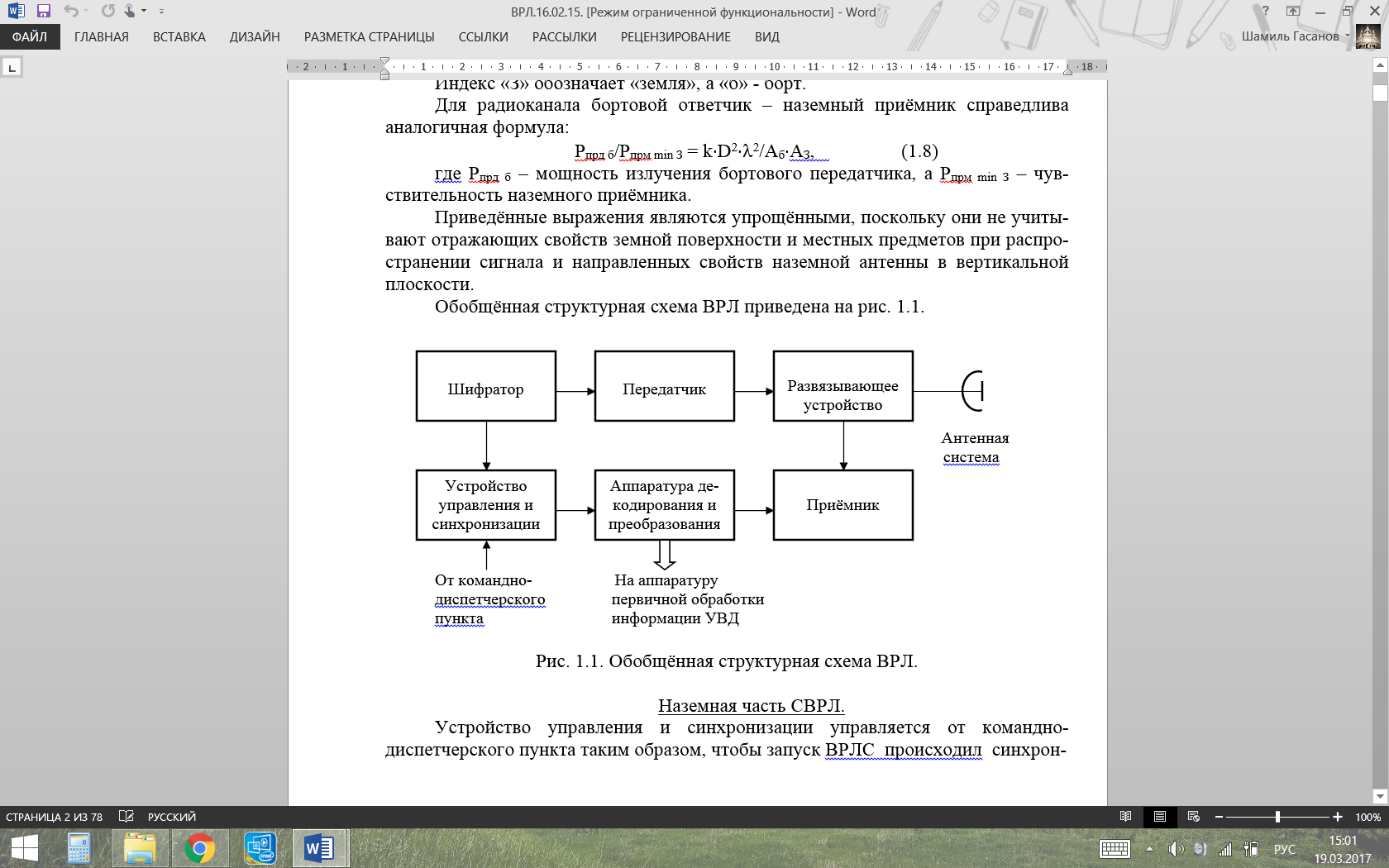
Обобщённая
структурная схема ВРЛ приведена на рис.
1.1.
Наземная часть сврл.
Устройство управления и синхронизации управляется от командно-диспетчерского пункта таким образом, чтобы запуск ВРЛС происходил синхронно с некоторым опережением, учитывая задержку сигнала при его кодировании и декодировании. Кодирование производится в шифраторе, формирующем последовательности видеоимпульсов с заданными временными интервалами между ними.
Полученные импульсы подаются на модулятор передатчика, формирующего радиоимпульсы, поступающие через устройство, развязывающее приёмную и передающие цепи, в антенную систему. Применение ответчика на борту ВС позволяет уменьшить мощность передатчика ВРЛС во много раз по сравнению с мощностью ПРЛС аналогичной дальности действия.
Ответный сигнал с борта ВС принимается наземной антенной системой и через развязывающее устройство поступает в приёмник, где производится его фильтрация, усиление, преобразование и детектирование. С выхода приёмника видеоимпульсы поступают на аппаратуру декодирования и преобразования информации. Преобразованный цифровой код, содержащий информацию о ВС, транслируется на аппаратуру первичной обработки информации. Дальность до ВС определяется по времени задержки между излучаемым ВРЛС сигналом и принимаемым сигналом ответчика, а азимут – угловым положением главного лепестка ДН приёмно-передающей антенны системы в момент приёма сигнала ответа.
Бортовая часть СВРЛ.
Бортовая часть СВРЛ содержит ответчик, содержащий приёмопередатчик, приёмник которого настроен на рабочую частоту ВРЛ. Принятый сигнал декодируется и из его содержания определяется состав запрашиваемой информации, которая формируется на основе данных, получаемых от бортовых систем ВС. Ответный сигнал кодируется и поступает на передающее устройство, несущая частота которого отличается от частоты наземного передатчика.
Сигналы систем вторичной радиолокации формируются в соответствии со стандартами ИКАО (Код RBS) или с национальным стандартом России (Код УВД). Они представляют собой кодированные группы импульсов определённой длительности. Временная расстановка и количество импульсов в группе определяют характер запрашиваемой информации. Дополнительный импульс, включённый в кодовую, последовательность служит для подавления ложных сигналов, приняты по боковым лепесткам ДН антенны ВРЛ.
Ответный сигнал состоит из координатного и информационного кодов.
Временная задержка информационного кода используется для измерения дальности до ВС. Информационный код содержит ключевые импульсы, определяющие вид передаваемой информации и кодовую последовательность, содержащую информацию о ВС (бортовой номер, запас топлива, высоты полёта и т.д.).
Система ВРЛ состоит из сети станций, работающих в режиме кругового обзора и имеющих узкую в горизонтальной области ДН антенны, что обеспечивает высокое разрешение и точность определения азимута ВС. Радиолокатор периодически излучает кодированные сигналы запроса. Ответные сигналы поступают, в пределах ДН антенны радиолокатора, от всех ВС, которые содержат ответчики и находятся на одном азимуте,
По рабочим частотам различают два диапазона – международный (диапазон I) и российский (диапазон II), которым соответствуют частоты (Мгц):
Диапазон I: запрос – 1030 0,2; ответ – 1090 3.
Диапазон II: запрос – (835; 837,5; 840) 0,3;
ответ – (730, 740, 750) 1,8.
Зарубежные системы стандарта ИКАО работают только на частотах диапазона I и имеют несколько меньшее информативное содержание кодов.
Следует отметить некоторые недостатки систем вторичной радиолокации. К ним относятся возможные перегрузки ответчиков и потери запросных сигналов, если ВС оказфывается в зоне действия нескольких наземных станций. Если ВС находятся близко друг от друга, то происходит наложение ответных сигналов от нескольких ВС. Большая длительность ответных сигналов снижает разрешающую способность ВРЛС по дальности. Автоматизированный информационный обмен по каналу «борт – земля» используется не в полной мере, а по каналу «земля – борт» отсутствует.
Усовершенствованием системы ВРЛС является принцип дискретно-адресного запроса.
Такие системы ВРЛС получили название дискретно-адресных (ДАС) ВРЛ. В них каждому ВС присваивается свой индивидуальный адресный код и ВС отвечает только на запрос, обращённый к нему. В этом случае снижается загрузка ответчика, уменьшается поток ответных излучений и уровень взаимных помех.
В ДАС ВРЛ используется пространственная селекция сигналов в азимутальной плоскости путём применения направленных антенн типа фазированных антенных решёток (ФАР), работают прямой и обратный каналы автоматического обмена информацией с ВС.
В системе используются более сложные коды запроса и ответа, однако предусматривается, чтобы станции ДАС ВРЛ обеспечивали опрос ВС, оборудованных обычными ответчиками, а ответчик ДАС ВРЛ отвечает запросчикам системы RBS.