Добавлен: 27.04.2024
Просмотров: 153
Скачиваний: 0

СОДЕРЖАНИЕ
Микропроцессорные устройства систем управления
1. Общая характеристика микропроцессоров.
1.1. Структура микропроцессора и его реализация.
1.2. Классификация современных микропроцессоров и их характеристики.
1.3. Принципы управления микропроцессорами.
1.4. Структура и типы команд микропроцессора.
1.5. Способы адресации информации и прерывание работы в микропроцессоре.
Косвенная регистровая адресация.
1.6. Организация ввода и вывода данных в микропроцессоре.
1.7. Система команд микропроцессора.
2. Принципы организации и применения микропроцессорных систем.
2.1. Особенности организации структуры МП-системы.
2.2. Структура МП-системы с общей шиной.
2.4. Применение МП-системы в качестве контроллера и системы сбора данных.
3. Основы программирования микропроцессоров.
3.1. Языки программирования микропроцессоров.
3.2. Программирование на языке ассемблера.
3.3. Средства разработки и отладки прикладных программ.
Средства отладки и диагностирования
Аппаратно-программные средства:
4. Типовые микропроцессоры и их применение.
4.1. Структура и характеристика типовых МП.
4.3. Примеры написания программ.
5. Мультипроцессорные системы, транспьютеры.
5.1. Классификация систем параллельной обработки данных
Конвейерная и векторная обработка.
Многопроцессорные машины с SIMD-процессорами.
Многопроцессорные системы с общей памятью
5.2 Мультипроцессорная когерентность кэш-памяти.
5.3. Многопроцессорные системы с локальной памятью и многомашинные системы
Микропроцессорные устройства систем управления
Важнейшая задача сегодняшнего дня – повышение технического уровня вычислительной техники, приборов и средств автоматизации на основе новейших достижений микроэлектроники. Особое место в ряду этих достижений занимает появление в 1971 г. микропроцессоров (МП), разработка и организация промышленного выпуска которых явилась таким же революционным шагом, как в свое время появление транзисторов.
Широкие возможности, которые предоставляет разработчикам использование МП, их малая себестоимость, компактность и надежность обеспечивают быстрый рост производства и проникновение МП в различные области экономики. Один из основных потребителей МП на мировом рынке – автоматизированный системы управления и контролирующая техника. Использование МП в системах управления позволяет увеличить их точность, быстродействие и надежность, а также расширить функциональные и эксплуатационные возможности.
Данный раздел написан с учетом того, что разработка систем, основанных на МП, требует понимания как аппаратных средств, так и программного обеспечения. В разделе рассмотрены общие вопросы построения и функционирования МП и МП-систем, вопросы программирования на языке ассемблера и вопросы построения и использования систем управления на базе МП.
1. Общая характеристика микропроцессоров.
1.1. Структура микропроцессора и его реализация.
В настоящее время всё более возрастающую роль начинают играть цифровые методы обработки информации. В связи с этим расширяется область применения цифровых систем - технических средств, выполняющих законченный процесс обработки цифровой информации, включающий ее прием, хранение, необходимые преобразования и выдачу. Стремительное развитие цифровых методов обработки информации обусловлено успехами интегральной технологии, позволяющей изготавливать цифровые микросхемы, содержащие десятки тысяч логических элементов. Использование микросхем повышенной степени интеграции позволяет существенно улучшить основные технико-экономические характеристики аппаратуры.
Во-первых, значительно уменьшается число внешних соединений в аппаратуре из-за большей функциональной сложности самих микросхем. Поскольку в микроэлектронной аппаратуре внешние соединения
являются одной из основных причин ее отказов, то их уменьшение при использовании микросхем повышенной степени интеграции позволяет повысить надежность аппаратуры.
Во-вторых, сокращается общая длина соединений между элементами. Задержка сигнала на каждые 30 см соединений равна 1 нс. Отсюда следует, что создание устройств со сверхвысоким быстродействием принципиально возможно только на базе микросхем повышенного уровня интеграции, в которых общую длину межсоединений можно довести до величины не превышающей 1 см, что обеспечивает задержку распространения сигнала между элементами не более 0,03 нс.
Кроме того, микросхемы повышенного уровня интеграции имеют по сравнению с микросхемами малого уровня интеграции меньшие размеры и более низкую стоимость в расчете на один функциональный элемент.
Отмеченные преимущества ИС с повышенным уровнем интеграции и обусловили появление больших (БИС) и сверхбольших (СБИС) интегральных схем. Однако появление БИС и СБИС поставило в начале 70-х годов новые проблемы перед разработчиками микросхем. Дело в том, что выпуск таких микросхем из-за больших первоначальных затрат, обусловленных разработкой их логической структуры, изготовлением фотошаблонов и технологической подготовкой производства экономически оправдан только в случае их массового производства.
С другой стороны каждый тип БИС, представляющий собой "жесткую", неизменяемую структуру из сотен и тысяч логических элементов, мог выполнять только одну определенную функцию или весьма ограниченный их набор, т.е. БИС были узкоспециализированными. Поэтому число типов БИС, требуемых для реализации различных цифровых систем, возрастало, а требуемый объем выпуска каждого из типов БИС оказывался небольшим.
Решение проблемы было достигнуто разработкой БИС, функции которых задаются путем подачи внешних электрических сигналов, изменяющихся по определенной программе. Такие БИС получили название микропроцессоров. МП - это программно-управляемое устройство, предназначенное для обработки цифровой информации и управления процессом этой обработки, выполненное в виде одной или нескольких БИС.
Качественным отличием МП от других типов микросхем является возможность их функциональной перестройки путем изменения внешней программы. В зависимости от программы МП может быть использован для решения самых разных задач и в этом способен заменить многие типы интегральных схем с "жесткой" логикой. Подобная
универсальность МП обусловила массовость их выпуска, что привело к снижению стоимости МП, в результате чего экономически выгодным стало их использование в промышленной автоматике, транспорте, бытовой технике и т.д. Создание дешевых МП с широкими функциональными возможностями обеспечило дополнительные преимущества цифровым методам обработки информации, что стимулировало их внедрение в такие отрасли, как телефония, радиосвязь, измерительная техника.
Сколь бы сложным ни был МП, в структуре его всегда можно выделить следующие три основных блока или устройства, как показано на рис. 1.1: УОД – устройство обработки данных; БИ – блок интерфейса; УУ – устройство управления.
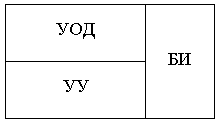
Рис.1.1. Обобщенная структурная схема МП.
Устройство обработки данных(УОД) является одним из основных блоков МП, в котором осуществляется вся необходимая арифметическая и логическая обработка информации. Все остальные блоки выполняют вспомогательные функции, но их важность тем самым ничуть не меньше. Устройство обработки данных обычно включает в себя следующие узлы: арифметико-логическое устройство, аккумулятор, регистры общего назначения, временные регистры, регистр признаков, десятичный корректор, коммутаторы.
Основным операционным блоком является арифметико-логическое устройство (АЛУ), выполняющее арифметические и логические операции, а также операции сдвига. АЛУ представляет собой, как правило, комбинационную схему, число разрядов которой определяется разрядностью шины данных МП. Один из участвующих в операции операндов поступает в аккумулятор, разрядность которого соответствует разрядности АЛУ. В аккумулятор заносится и результат выполненной операции. Кроме того, через аккумулятор в большинстве случаев реализуется обмен информацией между МП и внешними устройствами ввода-вывода. Аккумулятор, как и все регистры в МП реализуется на двухступенчатых, либо на одноступенчатых триггерах. Десятичный корректор позволяет преобразовать данные, находящиеся в АЛУ в виде двоичного кода, в двоично-десятичный код.
В более ранних разработках микропроцессоров
регистр признаков (регистр флажков) был предназначен только для хранения признаков результата операции. Поскольку результаты всех операций, выполненных АЛУ, передаются в аккумулятор, можно сказать, что регистр признаков содержал информацию о данных, пересылаемых из АЛУ в аккумулятор. Содержимое этого регистра использовалось в тех случаях, когда выполнение операции ставилось в зависимость от значений каких-либо признаков результата предыдущей операции. N-разрядов регистра признаков образовывалось совокупностью N-флажков (триггеров), причем каждый из разрядов хранил информацию о каком-либо одном признаке результата выполненной операции. Например, разряд признака переноса устанавливался в единичное состояние при наличии переноса из старшего разряда или заеме в старший разряд. Типичными набором регистра признаков были разряды (триггер-флажки): перенос, отрицательный результат, нулевой результат, переполнение диапазона представляемых чисел, четность количества единиц в двоичном коде. В более поздних разработках в регистр признаков кроме разрядов результата выполненной операции стали добавлять другие разряды, которые отражали состояние МП на том или ином этапе выполнения программы: разрешение прерывания, вид адресации, состояние стека и др.
Регистры общего назначения (РОН) используются в МП для хранения промежуточных данных в процессе обработки. РОН рассматриваются программистом как сверхоперативное запоминающее устройство, т.е. небольшой объем памяти, расположенный непосредственно на кристалле микросхемы МП. Использование РОН позволяет значительно увеличить быстродействие системы благодаря упрощенной адресации к ним. Число разрядов РОН равно разрядности МП, но в случае 16- и 32-разрядных МП РОН принято разбивать на части по восемь разрядов в каждой. Регистры временного хранения предназначены для временного хранения данных при пересылках их между различными узлами МП и в большинстве случаев являются программно недоступными.
Коммутаторы служат для мультиплексирования и демультиплексирования различных источников обрабатываемых операндов с АЛУ и имеют разрядность, равную разрядности АЛУ.
Блок интерфейсавключает в себя узлы МП, обеспечивающие его взаимодействие со всеми внешними устройствами. В их число входят: узел управления шинами, узел формирования адреса памяти и некоторые другие узлы.
Узел управления шинами
обеспечивает управление работой всех шин. Шины представляют собой набор соединительных проводников-линий, сгруппированных по функциональному назначению. По каждой линии может быть передано значение одного разряда двоичного кода в виде уровней напряжения, соответствующих логическому 0 или логической 1. По роду передаваемой информации все линии разделены на три группы, образующие шину данных, шину адреса и шину управления. Характерной особенностью шины данных является ее двунаправленность, под которой понимается возможность передачи данных в разные моменты времени в различных направлениях. Такая двунаправленность обеспечивается двунаправленными буферными регистрами, через которые МП подключается к шине данных. Шина адреса является однонаправленной. Ещё одна особенность буферных регистров заключается в том, что они являются трехстабильными, т.е. выходы этих регистров, кроме состояний логического 0 и логической 1, могут принимать третье пассивное или, так называемое высокоимпедансное состояние, благодаря чему регистр оказывается как бы отключенным от шины. Шины данных и адреса в некоторых типах МП могут быть мультиплексированы. Это значит, что одни и те же линии связи могут служить и для передачи данных, и для передачи адреса в различные моменты времени. Переключение направления передачи данных, переключение мультиплексированных шин, отключение шин от общих магистралей и обеспечение ряда других необходимых функций как раз и возлагается на узел управления шинами.
Узел формирования адресов памяти обеспечивает взаимодействие МП с оперативным запоминающим устройством и устройствами ввода-вывода. В его состав входят: счетчик команд, указатель стека, схема инкремента-декремента, сумматор адреса, адресные регистры, регистр адреса, вспомогательные регистры и коммутаторы.
Счетчик команд представляет собой регистр, содержащий адрес ячейки памяти, в которой хранится подлежащая выполнению команда. Обычно команды одной программы размещаются в последовательно расположенных ячейках памяти, в каждой из которых размещается 1 байт информации, т.е. в ячейках памяти с непрерывно возрастающими на 1, 2, 4 (в зависимости от разрядности шины данных МП) адресами, поэтому для перехода к следующей команде содержимое счетчика команд автоматически инкрементируется на 1, 2, 4 единиц после выборки текущей команды. При необходимости изменения естественного порядка следования команд в счетчик заносится адрес команды, к которой необходимо произвести переход. После перехода команды снова будут выполняться в естественном порядке. Разрядность счетчика команд может быть ниже разрядности шины адреса МП.

