Добавлен: 15.03.2024
Просмотров: 21
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«КАЛМЫЦКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
КУРСОВАЯ РАБОТА
ПО ДИСЦИПЛИНЕ
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Элиста 2013г.
Задание № 3
Проектирование и исследование механизмов двухступенчатого компрессора
Двухступенчатый компрессор предназначен для получения сжатого воздуха (газа), в основу которого положен кривошипно-ползунный механизм ОАВ. Компрессор приводится в движение электромотором через одноступенчатый редуктор, состоящий из двух цилиндрических колес zaи zb.
Сжатие воздуха осуществляется ступенчато: при движении поршня влево воздух всасывается из атмосферы в полость I ступени и при движении поршня 3 вправо сжимается в ней до давления pImax. После чего выталкивает в воздухосборник, из которого сжатый воздух поступает по трубопроводу в полость II ступени. Это происходит при открытии клапана, рассчитанного на давление pImax. Поршень 3 компрессора – ступенчатый, двух диаметров: D1 – первый ступени, D2 – второй ступени. Рабочая площадь первой ступени представляет собой круг, второй ступени – кольцо. В дальнейшем воздух сжимается до давления pIImax и поступает к потребителю. Процесс сжатия воздуха в каждой ступени описывается соответствующими индикаторами диаграммами (рис. 1 б).
У к а з а н и я. За начало отсчета следует принять то положение кривошипа ОА, при котором поршень 3 занимает крайнее левое положение.
Центры масс звеньев 1, 2, 3 находятся соответственно в точках О, S2 и В. Положение точки S2 определяется из условия AS2 = 0,25 AB.
Индикаторную диаграмму построить для точки В поршня 3, считая при этом, что точки h и d совпадают, а точки f и b лежат на одной вертикальной прямой.
Геометрический расчет зубчатой передачи произвести для шестерни
«a» и колеса «b».
Для всех вариантов принять:
а) частоту вращения ротора двигателя равной 1400 об/мин;
б) максимальное давление в 1-й ступени равным 0,2 МПа;
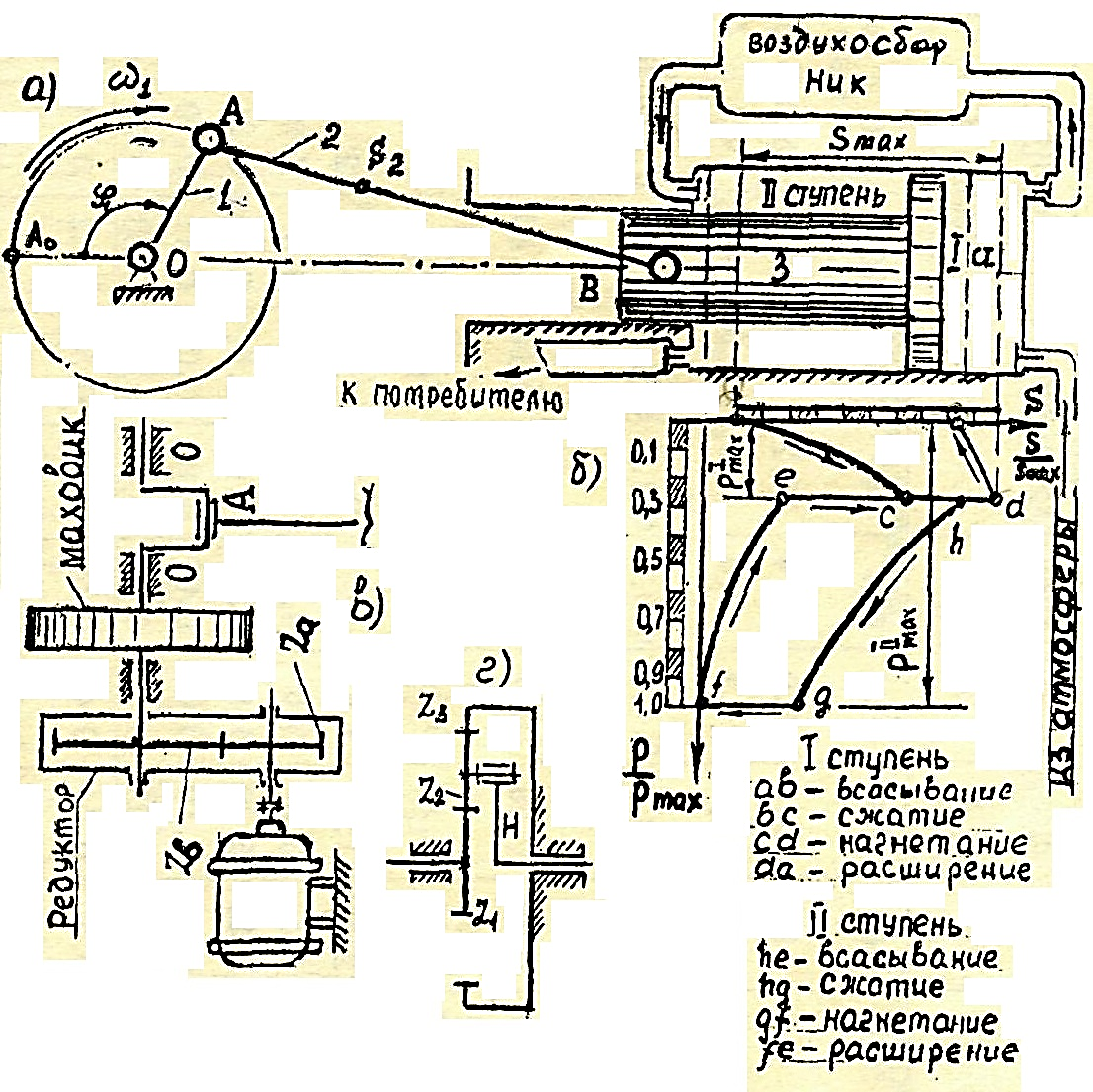
Рис. 1
Таблица 1
Исходные данные для построения индикаторной диаграммы компрессора
| Отношение текущего значения к максимальному | Первая ступень | Вторая ступень | |||||||||||
| сжатие | нагревание | сжатие | нагревание | ||||||||||
| s/smax | 0 | 0,3 | 0,6 | 1 | 0,9 | 0,8 | 1 | 0,6 | 0,45 | 0 | 0,1 | 0,16 | |
| p/pmax | 0 | 0,1 | 0,3 | 0,3 | 0,1 | 0 | 0,3 | 0,68 | 1 | 1 | 0,47 | 0,3 | |
Таблица 2
Исходные данные для проектирования и исследования двухступенчатого компрессора
| Параметр | Обозначение параметра | Единицы СИ | Числовые значения параметров для вариантов |
| 0 | |||
| Частота вращения кривошипа ОА | n1 | об/мин | 500 |
| Средняя скорость ползуна 3 | υср | м/с | 3,3 |
| Отношение длины шатуна АВ к длине кривошипа ОА, АВ/ОА | λ | - | 3,9 |
| Номера положений механизма для построения планов ускорений | - | - | 0, 1, 11 |
| Диаметр поршня первой ступени | D1 | м | 0,20 |
| Диаметр поршня второй ступени | D2 | м | 0,17 |
| Масса кривошипа ОА | m1 | кг | 2 |
| Масса шатуна АВ | m2 | кг | 4,0 |
| Масса ползуна 3 | m3 | кг | 6 |
| Моменты инерции звеньев относительно осей, проходящих через центры масс | Is1 | кг‧м2 | 0,12 |
| Is2 | кг‧м2 | 0,06 | |
| Максимальное давление второй ступени цилиндра | PII max | МПа | 0,37 |
| Положение механизма для силового расчета | - | - | 1 |
| Число зубьев шестерни редуктора | za | - | 24 |
| Число зубьев колеса редуктора | Zb | - | 45 |
| Модуль пары колес Za и Zb | m | мм | 5 |
| Передаточное отношение планетарного механизма | U1H | - | 5,4 |

Содержание
| 1. Структурное и кинематическое исследование рычажного механизма | 6 |
| 2. Силовой анализ рычажного механизма | 14 |
| 3. Проектирование зубчатой передачи | 18 |
| Список литературы | 22 |
1. Структурное и кинематическое исследование рычажного механизма
1.1 Проектирование кривошипно-ползунного механизма
Используя формулы и исходные данные, определяем длины кривошипа ОА, шатуна АВ


1.2 Структурное исследование рычажного механизма
Определяем степень подвижности механизма по формуле П. Л. Чебышева
W=3n-2p5-p4
где n=3 – число подвижных звеньев
p5=4 – число кинематических пар пятого класса
p4=0- число кинематических пар четвертого класса
W=3n-2p5-p4 = 3‧3-2‧4-0=1
Степень подвижности равна 1 - значит механизм имеет одно ведущее звено (кривошип).
 |
| Рис. 1.1. Схема кривошипно-шатунного механизма |
 |
| Рис.1.2 Структурные группы Ассура |
Разбиваем механизм на структурные группы Ассура, отделяя 2 звена – 2-е и 3-е.
Класс механизма определяется по старшинству структурной группы Ассура.
Старшая группа 2-го класса – значит механизм второго класса.
Структурная формула механизма:
I (0;1) → II 2 (2;3)
Механизм первого класса, состоящий из звеньев 0 и 1, присоединяется к группе Ассура II – го класса, 2 -го порядка, состоящей из звеньев 2 и 3.
1.3 Построение схемы механизма
В принятом масштабе вычерчиваем схему механизма. Для построения 12 положений звеньев механизма разделим траекторию, описываемую точкой А кривошипа ОА, на 12 равных частей. За нулевое принимаем то положение кривошипа ОА при котором точка В поршня 3 занимает крайнее левое положение. Из отмеченных на окружности точек А0,А1…А11 раствором циркуля, равным
намечаем на линии движения ползуна 3 точки В0, В1,…В11. Соединяем прямыми точки А0 с В0, А1 с В1 и т.д., получаем 12 положений звеньев механизма.
1.4 Построение планов скоростей механизма
Построение начинаем от входного звена, т.е. кривошипа ОА. Из точки р принятой за полюс плана скоростей, откладываем в направлении вращения кривошипа ОА вектор скорости точки А: рa = 60 мм.
Построение плана скоростей группы Ассура II класса 2вида:

где VA - скорость точки А кривошипа ОА.
Ее величина равна:

Угловую скорость ведущего звена определяем, как:


VBA - скорость точки В звена 2 во вращательном движении относительно точки А, направлена перпендикулярно оси звена АВ.
VB - скорость точки В ползуна 3 направлена вдоль оси ОВ.
Из точки А проводим линию, перпендикулярную оси звена АВ, а из полюса р плана скоростей линию, перпендикулярную оси ОВ. Точка b пересечения этих линий дает конец вектора искомой скорости VB.
Масштаб плана скоростей вычисляем по формуле:
где ра = 60 мм - произвольный отрезок.
Истинное значение скорости точки B находим по формулам:

Скорость точки S2 найдем из теоремы подобия. Делим отрезок ab на плане скорости в том же отношении, что и звено АВ, то есть:

Затем соединяем точку s2 с полюсом p и находим вектор скорости Vs2.
Истинное значение скорости всех точек находим по формулам:


По планам скоростей определяем скорости всех точек для 12-ти положений механизма и заносим в таблицу 1.1
Таблица 1.1
Значения скоростей точек механизма
| Параметр | Номер положения механизма | |||||||||||
| 0, 12 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | |
| VA, м/c | 5,2 | 5,2 | 5,2 | 5,2 | 5,2 | 5,2 | 5,2 | 5,2 | 5,2 | 5,2 | 5,2 | 5,2 |
| pb, мм | 0 | 23 | 45 | 60 | 59 | 37 | 0 | 37 | 59 | 60 | 45 | 23 |
| VB=pb‧μv,м/с | 0 | 2,00 | 3,92 | 5,22 | 5,13 | 3,22 | 0 | 3,22 | 5,13 | 5,22 | 3,92 | 2,00 |
| аb, мм | 60 | 52 | 31 | 0 | 31 | 52 | 60 | 52 | 31 | 0 | 31 | 52 |
| VBA=ab‧μv, м/с | 5,22 | 4,52 | 2,70 | 0 | 2,70 | 4,52 | 5,22 | 4,52 | 2,70 | 0 | 2,70 | 4,52 |
| ps2, мм | 31,2 | 48 | 55 | 60 | 55 | 48 | 31,2 | 48 | 55 | 60 | 55 | 48 |
| VS2 = ps2‧μv, м/с | 2,71 | 4,18 | 4,79 | 5,22 | 4,79 | 4,18 | 2,71 | 4,18 | 4,79 | 5,22 | 4,79 | 4,18 |