Добавлен: 15.03.2024
Просмотров: 16
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Значение угловой скорости шатуна АВ, рад/с
ωBA=ω2=VBA‧lAB, рад/с
Таблица 1.2
Значения угловой скорости шатуна АВ
| Параметр | Номер положения механизма | |||||||||||
| 0, 12 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | |
| ω2=VBA‧lAB, рад/с | 2,04 | 1,76 | 1,05 | 0 | 1,05 | 1,76 | 2,04 | 1,76 | 1,05 | 0 | 1,05 | 1,76 |
1.5 Построение планов ускорений механизма
Построение плана ускорений рассмотрим для 0, 1 и 11 положений механизма.
Так как кривошип ОА вращается с постоянной угловой скоростью ω1 рад/ с, то точка А звена будет иметь только нормальное ускорение, величина которого равна:

Определяем масштаб плана ускорений:
где πа = 100 мм- длина отрезка, изображающего на плане ускорений вектор нормального ускорения точки А кривошипа ОА.
Из произвольной точки π - полюса плана ускорений проводим вектор πа параллельно звену ОА от точки А к точке О.
Построение плана ускорений группы Ассура 2 класса проводим согласно уравнению:

где aВ- ускорение ползуна 3, направлено вдоль оси ОВ.
aВАn- нормальное ускорение точки В шатуна АВ при вращении его вокруг точки А, направлено вдоль оси звена АВ от точки В точке А.
Определяем нормальное ускорение aВАn (для положения 1):
Его масштабная величина, обозначим ее через аn, равна
aBAτ- касательное ускорение точки В шатуна АВ при вращение его вокруг А, направлено перпендикулярно к оси звена АВ.
Из точки А вектора πа плана ускорений проводим прямую, параллельную оси звена ВА, и откладываем на ней в направлении от точки В к точке А отрезок аn. Через конец вектора аn проводим прямую, перпендикулярно к оси звена ВА произвольной длины. Из полюса π проводим прямую, параллельную оси ОВ. На пересечении этих линий находится точка b, a отрезок πb в масштабе
 изображает ускорение аВ. Складывая вектора аn и nb, получаем полное ускорение звена АВ, для этого соединяем точки а и в прямой.
изображает ускорение аВ. Складывая вектора аn и nb, получаем полное ускорение звена АВ, для этого соединяем точки а и в прямой.Точку S2 на плане ускорений находим по правилу подобия, пользуясь соотношением отрезков. Соединяем точку S2 с полюсом π.
Численные значения ускорений точек В, S2, а также касательное ускорение aBAτ для 0, 1 и 11 положений определяем по формулам:




Таблица 1.3
Значения ускорений точек механизма
| Параметр | Номер положения механизма | ||
| 0, 12 | 1 | 11 | |
| anBA, м\с2 | 25,50 | 52,39 | 52,39 |
 , мм , мм | 9,3 | 19,12 | 19,12 |
 , мм , мм | 0 | 48 | 48 |
| , м\с2 | 0 | 131,52 | 131,52 |
 , мм , мм | 91 | 74 | 74 |
| , м\с2 | 249,34 | 202,76 | 202,76 |
 , мм , мм | 100 | 91 | 91 |
| , м\с2 | 273,53 | 249,34 | 249,34 |
1.6 Годограф скорости центра масс S звена 2
Для построения годографа скорости переносим векторы рs2 параллельно самим себе своими началами в одну точку р, называемую полюсом. Соединяем концы векторов плавной кривой.
1.7 Кинематические диаграммы точки В ползуна 3
Для построения диаграммы перемещения точки В ползуна 3 откладываем по оси абсцисс отрезок b = 120мм, изображающий период Т одного оборота кривошипа, и делим его на 12 равных частей. От точек 1, 2, ..., 11, 12 диаграммы S(t) откладываем ординаты 1-1, 2-2, ..., 11-11, 12-12 соответственно равные расстояниям В0 – В1, В0 - В2, ...., В0-В12 проходимые точкой В от начала отсчета.
Вычисление масштабов диаграммы перемещения:


Диаграмма скорости. Строится графическим дифференцированием графика перемещения по методу хорд: криволинейные участки графика S(t) заменяем прямыми 0 - 1*, 1* - 2*,..., 11* - 0, 12*. Под графиком перемещения проводим прямоугольные оси V и t. На оси t выбираем полюсное расстояние k1 = 30 мм. Из полюса р проводим наклонные прямые р -1', р - 2', ..., р - 11', параллельные хордам 0 - 1*, 1* - 2*, ..., 11* - 0, 12*. Из середины интервалов 0 - 1, 1 - 2, ....11-0 диаграммы V(t) проводим перпендикуляры к оси t (штриховые линия). Из точек 1', 2', ..., 11' проводим прямые, параллельные оси t. Точки пересечения соединяем плавной кривой. Масштаб диаграммы скорости вычисляем по формуле

Диаграмма ускорения. Строится графическим дифференцированием диаграммы скоростей. Все построения аналогичны ранее описанным при графическом дифференцировании диаграммы перемещения.
Масштаб диаграммы ускорения равен

где k1, k2 - полюсные расстояния.
2. Силовой анализ рычажного механизма
2.1 Определение сил давления газов на поршень
Сила давления газов на поршень определяется по формуле:

где p – давление газов в цилиндре, определяется по диаграмме,
 ;
; - коэффициент с индикаторной диаграммы;
- коэффициент с индикаторной диаграммы; – площадь поперечного сечения поршня,
– площадь поперечного сечения поршня, 
Для ступени II имеем:

2.2 Определение сил тяжести звеньев


2.3 Определение сил инерции звеньев
Сила инерции кривошипа равна

Сила инерции шатуна 2 равна

приложена в центре его масс S2 и по направлению противоположна вектору ускорения
 этого звена.
этого звена. Сила инерции ползуна 3 равна

приложена в центре его масс (точке B) и по направлению противоположна вектору ускорения
 этого центра.
этого центра.Для кривошипа OA инерционный момент равен

Для шатуна AB инерционный момент найдем по формуле:


Этот момент направлен противоположно угловому ускорению
 звена AB.
звена AB.Для ползуна 3 инерционный момент

2.4 Определение реакции в группе Ассура 2 класса звеньев 2,3
Подлежит определению: реакция

в поступательной кинематической паре B, которая направлена перпендикулярно линии хода ползуна; реакция
 во вращательной паре B; реакция
во вращательной паре B; реакция  во вращательной паре A.
во вращательной паре A.Составляем уравнения равновесия группы. Разложим реакцию
на две составляющих:  , направленную перпендикулярно линии AB, и
, направленную перпендикулярно линии AB, и  , направленную по линии AB. Тогда геометрическая сумма сил, приложенных к группе, равна
, направленную по линии AB. Тогда геометрическая сумма сил, приложенных к группе, равна
В качестве второго уравнения возьмем уравнение

которое, будучи развернутым, примет вид

откуда


где
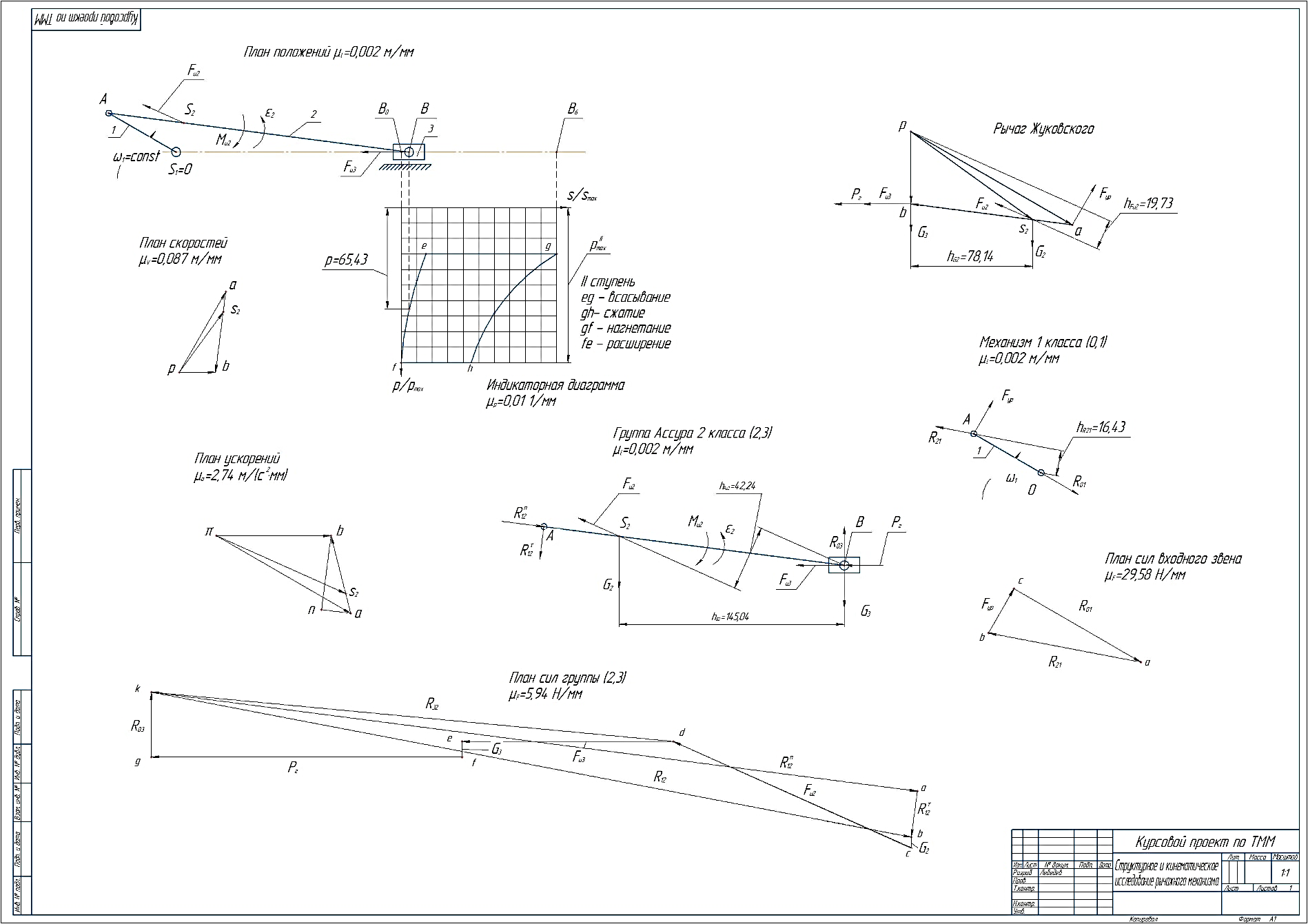
 = 145,04 мм - плечо силы
= 145,04 мм - плечо силы  относительно точки B (найдено по чертежу);
относительно точки B (найдено по чертежу); = 42,24 мм - плечо силы
= 42,24 мм - плечо силы  относительно точки B (найдено по чертежу).
относительно точки B (найдено по чертежу).Строим план сил группы в масштабе:

Порядок построения векторной суммы: проводим прямую, параллельную AB. Это будет линия действия силы
.Отложим от произвольной точки а, лежащей на этой прямой, силу в виде отрезка 
перпендикулярно прямой AB.
От точки b откладываем силу
 в виде отрезка
в виде отрезка