Файл: Назначение и задачи решаемые морскими навигационными рлс.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.03.2024
Просмотров: 16
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
Назначение и задачи решаемые морскими навигационными РЛС.
Навигационные радиолокационные станции представляют собой импульсные радиотехнические средства, работа которых основана на использовании зависимости между временем распространения радиосигнала и навигационным параметром. Такая РЛС периодически излучает кратковременные импульсы колебаний СВЧ, а в промежутке между излучениями принимает отраженные от объектов импульсные сигналы, запаздывающие на время t3=2D/c. Здесь D — расстояние до объекта, а с - скорость распространения радиоволн. По измеренному интервалу времени рассчитывается дальность до объекта D=сt3/2. Направление (азимут) на объект определяется с помощью антенны направленного действия. При повороте антенны в горизонтальной плоскости, когда цель окажется в пределах ее диаграммы направленности, на вход приемника РЛС поступают отраженные сигналы. При совпадении оси диаграммы направленности антенны с целью напряжение на входе приемника будет максимальным, и указатель поворота антенны покажет направление на объект. При нахождении в радиусе действия РЛС нескольких целей отраженные сигналы от них будут смещены по времени и азимуту. Отраженные сигналы от объекта отображаются на экране РЛС, что дает возможность определять его координаты.
Основной недостаток радиолокационного метода пеленгования — относительно невысокая точность определения направления на объект.
РЛС применяются автономно или совместно с береговыми устройствами - радиолокационными отражателями и радиолокационными маяками-ответчиками, находящимися в радионавигационных точках.
Определение места судна относительно отражающих объектов производится по пеленгу и расстоянию до них. Поэтому навигационные РЛС являются дальномерно-азимутальными радиотехническими средствами.
Возможность определения местоположения судна при плавании в сложных условиях (малая видимость, наличие навигационных опасностей, узкостей и др.), наглядность отображения внешней обстановки в районе плавания делают РЛС одним из основных технических средств судовождения.
РЛС позволяет решать следующие задачи:
-
определение координат места судна по точечным и пространственным ориентирам путем измерения радиолокационных пеленгов
и дистанций; -
определение места судна по точечным и пространственным ориентирам путем совмещения разномасштабных изображений береговой линии
или отражающих горизонталей, наблюдаемых на индикаторе кругового обзора РЛС и на карте; -
опознание побережья и глазомерная ориентировка при плавании в стесненных условиях; -
обнаружение надводных навигационных опасностей, плавучего льда, ливневых облаков и снежных зарядов; -
обнаружение и наблюдение встречных судов, определение элементов их движения для оценки ситуации недопустимого сближения и решения задачи безопасного расхождения с ними; -
определение относительного места судна при плавании в караванах; -
определение маневренных элементов судна. -
Навигационные РЛС, входящие в состав автоматизированных навигационных комплексов или в интегрированное оборудование ходового мостика, или сопрягаемые с системами автоматической радиолокационной прокладки, позволяют, кроме того: -
автоматизировать процесс прокладки линий относительного движения встречных судов, выполнять расчеты элементов их
движения и маневра расхождения с ними; -
осуществлять обсервационную прокладку пути судна при плавании в стесненных условиях и в прибрежной зоне; -
непосредственно измерять элементы суммарного сноса судна. -
К недостаткам навигационных РЛС, влияющим на безопасность судовождения, относятся: -
наличие теневых секторов и минимальной дистанции, в пределах которых объекты не обнаруживаются; -
специфическое искажение объектов на экране РЛС относительно их изображения на морской навигационной карте и затруднение их опознавания; -
ограниченность дистанций обнаружения объектов географическим фактором радиолокационной видимости, зависимость от отражающих способностей и размеров объектов, а также зависимость возможности обнаружения от маскирующего влияния осадков ливневого характера; -
относительно низкая точность радиолокационного пеленгования.
При использовании РЛС необходимо учитывать, что сильные осадки (ливни, град, снежные заряды) уменьшают дистанцию обнаружения объектов на 30-50%, а наличие качки снижает точность измерений. В этих условиях наблюдение необходимо вести при длине волны РЛС 10 см. На условия наблюдения влияет волнение моря, вызывающее засветку центральной части экрана РЛС отражениями от волн.
На точность определения места судна с помощью РЛС непосредственно влияют искажения за счет размеров ориентиров и углов их облучения РЛС. При определении места по радиолокационным пеленгам и дистанциям необходимо использовать точечные ориентиры, соизмеримые с разрешающей площадью РЛС (площадь, ограниченная разрешающей способностью РЛС по углу и дистанции). Пространственные ориентиры, размеры которых больше разрешающей площади, целесообразно использовать только для обсерваций по измеренным радиолокационным дистанциям до участков, облучаемых РЛС под прямым углом. При облучении таких ориентиров (объектов) под острым углом их изображение на экране РЛС смазывается, что вызывает появление трудно учитываемых систематических погрешностей как по направлению, так и по дистанции.
При определении места судна по естественным радиолокационным ориентирам необходимо учитывать, что их отражающие поверхности (скалы, обрывистый берег, сопки и т. п.) не совпадают на местности с береговой линией, а лежат на уровнях (горизонталях), обычно превышающих уровень моря, а на больших дальностях — и высоту антенны РЛС. Отражающие горизонтали, определенные опытным путем, наносятся на карту.
-
Принцип работы типовой морской навигации РЛС по структурной схеме.
Работу типовой морской навигации РЛС (в передатчике которого применен магнетронный генератор) можно рассмотреть на примере схемы, приведенной на рис. 1.
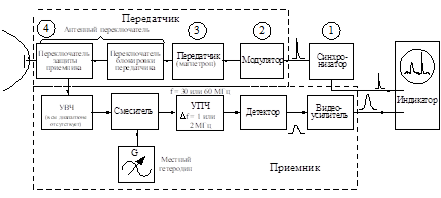
Рис.1
Синхронизатор - генерирует последовательность времязадающих импульсов с частотой, равной частоте повторения импульсов. Эти импульсы включают модулятор и начало развертки индикатора;
Модулятор - управляет мощным генератором - передатчиком, который вырабатывает прямоугольный видеоимпульс, включающий магнетрон на время, равное его длительности;
Передатчик - это может быть магнетрон либо другой активный прибор, способный генерировать синусоидальные колебания требуемой частоты и амплитуды, причем вырабатываемый СВЧ-радиоимпульс (на каждый сигнал модулятора) должен иметь достаточную крутизну фронтов и длительность задаваемую модулятором. Для типового РЛ, предназначенного для обнаружения обычного самолета на дальности 200 - 400 км, характерны типовые мощности 1 - 10 МВт, длительность импульса несколько микросекунд и частота повторения импульсов - несколько сот импульсов в секунду f

п.
Модулированный СВЧ-радиоимпульс, генерируемый передатчиком, канализируется по передающему тракту к антенне, которая излучает его в пространство. Обычно, как было отмечено ранее, для передачи и приема применяется общая антенна. На время передачи приемник отключается с помощью быстродействующего переключателя (для предотвращения повреждения большой мощностью). После излучения зондирующего импульса переключатель защиты приемника снова присоединяет приемник к антенне.
Во время приема переключатель блокировки передатчика, не оказывающий влияния на передачу сигнала от передатчика к антенне в течение передающей части рабочего цикла станции, обеспечивает канализацию принятого сигнала к приемнику. При отсутствии переключателя блокировки передатчика часть принятой мощности рассеивалась бы в передатчике и будет потерянной. Переключатели защиты приемника и передатчика вместе образуют антенный переключатель. В РЛС с раздельными антеннами он может отсутствовать.
РЛ-приемник обычно супергетеродинный. В качестве УВЧ, являющегося первым каскадом приемника, может служить малошумящий параметрический усилитель. В РЛС сантиметрового диапазона УВЧ обычно отсутствует, а вместо него стоит смеситель. С помощью смесителя и гетеродина СВЧ-сигнал преобразуется в сигнал ПЧ, так как в этом диапазоне легче сконструировать узкополосный усилитель с высоким коэффициентом усиления. В типовом усилителе ПЧ средняя промежуточная частота обычно составляет 30 или 60 МГц, а ширина полосы пропускания 1 или 2 МГц. Огибающая импульсной модуляции СВЧ-колебаний выделяется детектором и усиливается видеоусилителем до уровня, необходимого для работы индикатора (ЭЛТ). В индикаторный блок подаются также синхронизирующие импульсы.
Определяя направление антенны, можно получить информацию об угловых координатах цели, что позволяет разместить отраженный сигнал на экране ЭЛТ должным образом и определить координаты цели.
Графики, поясняющие импульсный метод работы РЛС, имеют вид, приведенный на рис.2
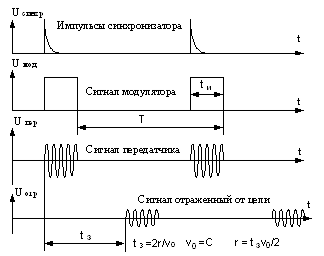
Рис.2
В зависимости от назначения РЛС применяются различные типы индикаторов и виды разверток. В одномерных индикаторах дальности чаще всего применяются: а) линейная, б) горизонтальная, в) вертикальная, г) логарифмическая, д) кольцевая развертки, реже е) спиральная (рис.3)
а) б) в) г) д)
Рис.3
В одномерных индикаторах обычно используется амплитудная отметка цели, которая позволяет судить не только о моменте прихода отраженного сигнала (т.е. о расстоянии до цели), но и об интенсивности отраженного сигнала и его форме. В двухмерных индикаторах «дальность - угол» (азимут или угол места) луч перемещается одновременно в двух взаимно перпендикулярных направлениях.
Перемещение луча в одном направлении является функцией времени и используется для определения дальности. Перемещение луча в другом направлении характеризуется изменением угловой координаты. Применяются две распространенные системы координат для определения положения точки на плоскости: полярная и прямоугольная. Для определения положения цели на экране плоского индикатора применяются соответственно два типа развертки: радиальная - круговая и прямоугольная растровая.
Радиально-круговая развертка используется в индикаторах кругового обзора для одновременного определения дальности и азимута цели (вращение линии развертки синхронизируется с поворотом антенны по азимуту). За один оборот антенны линия развертки образует на экране круг. Электронный луч, перемещающийся вдоль линии развертки (от центра к периферии), последовательно обегает все точки поверхности экрана.
При прямоугольной растровой развертке положение цели на экране определяется в прямоугольной системе координат (на экране типа азимут - дальность отмечены сигналы, отраженные от воздушных целей в просматриваемом секторе 60О). Движение пятна на экране индикатора вдоль строки в некотором масштабе соответствует дальности до цели (r, км), а движение по вертикали - положению антенны относительно базиса РЛС (сканирование - угол ).
Сочетание устройств отображения информации с устройствами обработки привело к созданию знаковых индикаторов , на которых изображение целей на местности осуществляется не яркостными отметками, а миниатюрной буквенно-цифровой матрицей, содержащей извлеченную информацию о свойствах цели и расположенной в соответствующих местах экрана.
Задачей упомянутых устройств обработки информации является получение наиболее точных и достоверных оценок информационных параметров выходных сигналов приемного устройства в условиях присутствия помех.
Различают разомкнутые и замкнутые устройства обработки информации.
Разомкнутые - применяются для одновременной обработки информации, содержащейся во многих сигналах, например информации о многих целях, полученной с помощью РЛС, ведущей обзор пространства, или информации о многих величинах, передаваемой с помощью радиотелеметрических линий.
Замкнутые - применяются для непрерывного измерения (оценки) текущего значения информационного параметра, когда он является функцией времени, например для автоматического слежения за координатой движущейся цели, которое осуществляется аналоговым следящим приводом, иногда довольно мощным (например, при слежении за угловой координатой цели путем соответствующего поворота оси антенны).
Различают, кроме того, первичную и вторичную обработку радиолокационной информации.
Задачей первичной обработки является определение текущих значений координат целей, для чего в устройстве первичной обработки производится обнаружение сигнала на фоне помех и оценка значений его информационных параметров.
Вторичная обработка информации позволяет оценить параметры движения цели (составляющие скорости) и, производя соответствующую фильтрацию входного случайного процесса (которым является зависящая от времени смесь сигнала с шумом), определить траекторию и экстраполировать ее положение в следующие моменты времени.
Блок-схема, приведенная на рис.1, представляет собой простейший вариант РЛС, где отсутствуют: устройства автоматической регулировки приемника при перестройке передатчика (АПЧ), схемы АРУ, схемы, уменьшающие влияние соседних РЛС или паразитных сигналов, схемы выделения движущихся целей и неподвижных объектов (СДЦ селекторы движения целей) и устройства, обеспечивающие автоматическое сопровождение антенной движущейся цели.
Применяемые в РЛС и РНС СВЧ-диапазона остронаправленные, чаще всего зеркальные, рупорные, линзовые антенны или ФАР, представляют собой сложную и точную механическую конструкцию. Сканирование диаграммы направленности осуществляется за счет механического движения всей антенны, облучения части зеркала или линзы либо электронным управлением фазой (ФАР).
Расстояние до цели, или дальность (расстояние и дальность в РЛ используются как термины-синонимы, хотя в артиллерии дальность это горизонтальная проекция расстояния) могут иметь различный смысл. Когда речь идет о воздушных целях, иногда используют термин «наклонная дальность» для определения расстояния от РЛС до цели (термин «горизонтальная дальность» обозначает проекцию наклонной дальности на поверхность Земли), последняя определяется измерением времени прохождения импульса от цели и обратно.